 2015-06-26
2015-06-26 4734
4734Сначала определим минимальную разрядность АЦП.
Динамический диапазон (SNR) – разница между максимальным и минимальным сигналами, которые может измерить преобразователь. В качестве максимального сигнала принимается максимальный выходной сигнал гироскопа. В качестве минимально различимого сигнала берется среднеквадратичное напряжение шума на входе АЦП в отсутствие сигнала. Важно понимать, что динамический диапазон – величина, относящаяся к какой-либо частотной полосе. В нашем случае, динамический диапазон сигнала, приведенного ко входу АЦП для полосы 50 Гц равен 93,5 дБ.
Отношение максимального входного напряжения АЦП к минимальному равно 47519. Следовательно, АЦП должен иметь разрешение, обеспечивающие количество уровней квантования, равное отношению напряжений на входе АЦП. Однако, разрешение и точность – параметры, которые часто путают, когда речь идет о производительности АЦП. Разрешение – это количество разрядов, используемых при оцифровке входного сигнала. Например, 18-разрядный АЦП разбивает шкалу на 262144 позиций выходного кода. Минимальный сигнал, который устройство может измерить, равен 1 разряду (МЗР – младший значащий разряд) или 1/262144 доле напряжения. В нашем случае младший значащий разряд равен 23 мкВ.
Точность АЦП характеризует, насколько близко фактический выходной код совпадает с теоретическим для данного входного аналогового сигнала. Другими словами, это количество разрядов выходного кода, которые несут полезную информацию о входном сигнале. Точность АЦП может оказаться намного ниже, чем разрешение, из-за внутренних и внешних источников шума. Динамический диапазон АЦП должен соответствовать максимальной амплитуде преобразуемого сигнала, чтобы точность преобразования была наибольшей.
Таким образом, нельзя выбирать разрядность АЦП исходя из минимального количества уровней квантования, т.к. какое-то количество разрядов будет неточно преобразовывать сигнал.
Для того, что бы минимизировать потерю точности, важно согласовать динамический диапазон АЦП и максимальную амплитуду сигнала.
По ТЗ, минимальная разрядность должна быть не меньше 18, однако, исходя из вышеописанного, для достижения наибольшей точности преобразования следует выбирать максимальную разрядность АЦП.
Другое важное требование к АЦП – частота дискретизации. Согласно ТЗ, частота дискретизации должна быть не меньше 7 кГц, что намного превышает частоту сигнала гироскопа. Такая частота преобразования АЦП выбрана для того, что бы получить эффект, названный передискретизацией. Как правило, сигналы оцифровываются с минимально необходимой частотой дискретизации из соображений экономии, при этом шум квантования является белым, то есть его спектральная плотность мощности равномерно распределена во всей полосе. Если же оцифровать сигнал с частотой дискретизации, гораздо большей, чем по теореме Котельникова— Шеннона, а затем подвергнуть цифровой фильтрации для подавления спектра вне частотной полосы исходного сигнала, то отношение сигнал/шум, будет лучше, чем при использовании всей полосы. Таким образом можно достичь эффективного разрешения большего, чем разрядность АЦП.
Передискретизация (англ. oversampling) используется в сигма-дельта АЦП для достижения большего количества эффективных разрядов.
В мире АЦП существует компромисс между скоростью и точностью. И нам, как будущим инженерам надо его найти.
Ещё одним важным параметром АЦП является его цифровой интерфейс. Структура цифрового интерфейса определяет способ подключения АЦП к приемнику выходного кода, в нашем случае к микропроцессору, расположенному в другом блоке. Свойства цифрового интерфейса непосредственно влияют на уровень верхней границы частоты преобразования АЦП.
Рассмотрим типы интерфейсов АЦП.
В общем случае они делятся на последовательный и параллельные.
В ТЗ указано, что обмен данными между АЦП и микропроцессором должен осуществляться по интерфейсу SPI. Поэтому мы не будем подробно останавливаться на описании других интерфейсов и сразу перейдем к описанию интерфейса SPI.
SPI — последовательный синхронный стандарт передачи данных в режиме полного дуплекса, т.е. устройство может в любой момент времени и передавать, и принимать информацию. Передача и прием ведутся устройством одновременно по двум физически разделенным каналам связи. SPI разработан компанией Motorola для обеспечения простого и недорогого сопряжения микроконтроллеров и периферии. SPI также иногда называют четырёхпроводныминтерфейсом. Интерфейс SPI, наряду с I2C, относится к самым широко-используемым интерфейсам для соединения микросхем.
В отличие от стандартного последовательного порта, SPI является синхронным интерфейсом, в котором любая передача синхронизирована с общим тактовым сигналом, генерируемым ведущим устройством (процессором). Принимающая (ведомая) периферия синхронизирует получение битовой последовательности с тактовым сигналом. К одному последовательному периферийному интерфейсу ведущего устройства-микросхемы может присоединяться несколько микросхем. Ведущее устройство выбирает ведомое для передачи, активируя сигнал «выбор кристалла» на ведомой микросхеме. Периферия, не выбранная процессором, не принимает участия в передаче по SPI.
Протокол передачи по интерфейсу SPI предельно прост и, по сути, идентичен логике работы сдвигового регистра, которая заключается в выполнении операции сдвига и, соответственно, побитного ввода и вывода данных по определенным фронтам сигнала синхронизации. Установка данных при передаче и выборка при приеме всегда выполняются по противоположным фронтам синхронизации. Это необходимо для гарантирования выборки данных после надежного их установления. Если к этому учесть, что в качестве первого фронта в цикле передачи может выступать нарастающий или падающий фронт, то всего возможно четыре варианта логики работы интерфейса SPI. Эти варианты получили название режимов SPI и описываются двумя параметрами:
CPOL – исходный уровень сигнала синхронизации (если CPOL=0, то линия синхронизации до начала цикла передачи и после его окончания имеет низкий уровень (т.е. первый фронт нарастающий, а последний – падающий), иначе, если CPOL=1, – высокий (т.е. первый фронт падающий, а последний - нарастающий));
CPHA – фаза синхронизации; от этого параметра зависит, в какой последовательности выполняется установка и выборка данных (если CPHA=0, то по переднему фронту в цикле синхронизации будет выполняться выборка данных, а затем, по заднему фронту, – установка данных; если же CPHA=1, то установка данных будет выполняться по переднему фронту в цикле синхронизации, а выборка – по заднему
Ведущая и подчиненная микросхемы, работающие в различных режимах SPI, являются несовместимыми, поэтому, перед выбором подчиненных микросхем важно уточнить, какие режимы поддерживаются ведущим шины. Аппаратные модули SPI, интегрированные в микроконтроллеры, в большинстве случаев поддерживают возможность выбора любого режима SPI и, поэтому, к ним возможно подключение любых подчиненных SPI-микросхем (относится только к независимому варианту подключения). Кроме того, протокол SPI в любом из режимов легко реализуется программно.
На рисунке 2.28 изображено простейшее подключение шины SPI.
Рисунок 2.28 – простейшее подключении SPI.
Интерфейс SPI используют четыре цифровых сигнала:
– MOSI (DO, SDO, DOUT) — выход ведущего, вход ведомого (англ. Master Out Slave In). Служит для передачи данных от ведущего устройства ведомому.
– MISO (DI, SDI, DIN) — вход ведущего, выход ведомого (англ. Master In Slave Out). Служит для передачи данных от ведомого устройства ведущему.
– SCLK (DCLOCK, CLK, SCK) — последовательный тактовый сигнал (англ. Serial Clock). Служит для передачи тактового сигнала для ведомых устройств.
– CS или SS — выбор микросхемы, выбор ведомого (англ. Chip Select, Slave Select).
В таблице 6 показаны режимы работы SPI.
Таблица 6 – Режимы работы SPI.
| Режим SPI | ||||
| CPOL | ||||
| CPHA | ||||
| Временная диаграмма первого цикла синхрониза-ции |  |  |  | 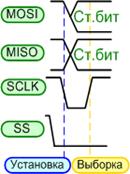 |
Разобравшись с основными параметрами и характеристиками АЦП можно переходить к выбору конкретной модели АЦП.
Проведем обзор доступных АЦП от фирм Analog Devices, Texas Instruments и отечественной фирмы Восход.
Выбор АЦП осуществляться из следующих принципов: минимальный шум при требуемой частоте выборок и разрядности, печатный монтаж, напряжение питания 5 В аналоговой части и 1,8 В цифровой и выходной интерфейс SPI.
Проанализировав рынок отечественных АЦП, можно сделать вывод, что доступных для гражданского применения нет 18-разрядных АЦП.
АЦП с разрядностью 18 бит и выше доступны только для военного применения. А информация о их характеристиках и конкретных моделях доступна только для людей с допуском секретности третьего уровня. У меня есть такой уровень и допуск к засекреченной информации. Анализ отечественных компонентов показал, что их характеристики хуже на порядок зарубежных аналогов. Выкладывать сравнительную информацию по отечественным компонентам запрещено. Таким образом, применение отечественных АЦП, как и в случае с ОУ не целесообразно.
Рассмотрим представителей фирмы Analog Devices. Выбираем АЦП из следующих соображений – разрешение не ниже 18 бит при частоте выборок не ниже 7 кГц, напряжение питания аналоговой части – не более 5 В, наличие двух каналов для дифференциального подключения гироскопа.
Проанализировав техническую информацию на АЦП фирмы Analog Devices, можно прийти к выводу, что лучшим (на данный момент) АЦП удовлетворяющим нашим требованиям является AD7738.
AD7738 – высокоточный высокоскоростной внешний аналоговый интерфейс для оборудования управления производственными процессами, PLC и DCS. 16 битное разрешение без искажений аналоговых сигналов диапазона р-р при времени преобразования 117 мкс (частота опроса каналов 8,5 кГц) делает этот прибор идеальным для применения в мультиплексируемых системах с высоким разрешением. Прибор может быть сконфигурирован через простой цифровой интерфейс, позволяя сбалансировать шумовые характеристики, снижая частоту дискретизации от 15,4 кГц.
Аналоговый внешний интерфейс может быть сконфигурирован как четыре полностью дифференциальных или восемь несимметричных входов с униполярными/двухполярными динамическими диапазонами 0,625 В, 0,125 В или 2,5 В и возможностью подачи на общий вход напряжения от 200 мВ до AVDD 300 мВ. Мультиплексируемый вывод AD7738 снабжен защелкой с внешним разрешением для обеспечения возможности управляемого выбора сигнала при работе прибора.
Дифференциальный вход опорного напряжения имеет возможность определения отсутствия опорного напряжения. AD7738 поддерживает опцию калибровки отдельно каждого канала в системе.
Цифровой последовательный интерфейс может быть конфигурирован для работы в трехпроводном режиме и совместим с микроконтроллерами и DSP. Все входы интерфейса содержат триггеры Шмитта.
Прибор имеет расширенный температурный диапазон от -40°С до +105°C.
Рассмотрим АЦП фирмы Texas Instruments.
Проанализировав техническую информацию на АЦП фирмы Texas Instruments, можно прийти к выводу, что лучшим (на данный момент) АЦП, удовлетворяющим нашим требованиям является ADS1255.
Последние модели семейства ADS1255 обладают значительно лучшими параметрами по сравнению с AD7738. При максимальной частоте дискретизации 30 кГц потребляемая мощность не превышает 35 мВт. Особенностью данных АЦП является использование программируемого цифрового ФНЧ, благодаря которому удается достичь чрезвычайно низкого уровня шумов и высокой эффективной разрядности. Например, при коэффициенте усиления PGA 64 и частоте дискретизации 30 кГц среднеквадратичное напряжение шумов, приведенное ко входу, составляет 1,2 мкВ, а значение эффективной разрядности равно 17. Возможна работа АЦП в режиме однократного преобразования с последующим переходом в экономичный режим Standby с энергопотреблением 0,4 мВт. Дополнительно в состав ИМС входит детектор состояния входного датчика, отключаемый входной буферный усилитель, входной мультиплексор на 2 дифференциальных входа у ADS1255, усилитель PGA и встроенный тактовый генератор, способный работать в режиме внешней синхронизации или с подключаемым к специальным выводам ИМС кварцевым резонатором. Кроме последовательного интерфейса ADS1255 имеет два ввода/вывода общего назначения (GPIO), параметры которых устанавливаются записью соответствующих управляющих битов в регистр ввода/вывода АЦП. GPIO остаются активными и в режимах Standby и Power Down и автоматически переходят в режим ввода после перехода ИМС в активный режим. Если данные выводы не используются, для экономии энергии изготовитель ИМС рекомендует установить их как линии вывода и оставить свободными или установить как линии ввода и соединить с общим проводом. Для питания цифровой части АЦП ADS1255 необходим источник напряжением от 1,8 до 3,6 В (рекомендуемое значение 3,3 В).
Сравнительные характеристики двух рассматриваемых АЦП представлены в таблице 7.
Таблица 7 – сравнительные характеристики АЦП AD7738 и ADS1255.
| Наименование | AD7738 | ADS1255 |
| Разрешающая способность, бит | ||
| Частота дискретизации, кГц | ||
| Количество входных дифференциальных каналов | ||
| Интерфейс | SPI | SPI |
| Входное напряжение, В | ||
| Нелинейность, % | 0,003 | 0,001 |
| Потребляемая мощность, мВт | ||
| Среднеквадратичный шум на частоте 7 кГц, мкВ/ | 7,2 | |
| Температурный коэффициент смещения нуля, мкВ/°С | 0,1 | |
| Отношение сигнал/шум, дБ |
В результате сравнительного анализа двух АЦП, можно сделать вывод, что лучшими показателями обладает АЦП фирмы Texas Instruments ADS1255.
Определившись с микросхемой АЦП, нужно разобраться с её схемой подключения.








