 2015-07-04
2015-07-04 2770
2770СИГНАЛЫ и ЛИНЕЙНЫЕ СИСТЕМЫ
Signals and linear systems. Introduction in the theory of signals and systems.
Тема 1. ВВЕДЕНИЕ В ТЕОРИЮ СИГНАЛОВ И СИСТЕМ
Одна из основных задач теории в любой области знаний – найти позицию, с которой объект виден в предельной простоте.
Джосайя Уиллард Гиббс. Американский физик, ХIХ в.
Для понимания истин, предельно простых для теоретиков, нормальному инженеру требуется специальная подготовка.
Роберт Тимофеевич Шарло. Уральский геофизик, ХХ в.
Содержание
1. Общие сведения и понятия. Понятие сигнала. Шумы и помехи. Размерность сигналов. Математическое описание сигналов. Спектральное представление сигналов. Математические модели сигналов. Виды моделей. Классификация сигналов.
2. Типы сигналов. Аналоговый сигнал. Дискретный сигнал. Цифровой сигнал. Преобразования типа сигналов. Графическое отображение сигналов. Тестовые сигналы.
3. Системы преобразования сигналов. Общее понятие систем. Основные системные операции. Линейные системы.
4. Информационная емкость сигналов. Понятие информации. Количественная мера информации. Энтропия источника информации. Основные свойства энтропии Энтропия непрерывного источника информации. Информационная емкость сигналов.
1.1. Общие сведения и понятия [1,10, 15, 25]
Понятие сигнала. В XVIII веке в теорию математики вошло понятие функции, как определенной зависимости какой-либо величины y от другой величины – независимой переменной х, с математической записью такой зависимости в виде у(х). Довольно скоро математика функций стала базовой основой теории всех естественных и технических наук. Особое значение функциональная математика приобрела в технике связи, где временные функции вида s(t), v(f) и т.п., используемые для передачи информации, стали называть сигналами.
В технических отраслях знаний термин "сигнал" (signal, от латинского signum – знак) очень часто используется в широком смысловом диапазоне, без соблюдения строгой терминологии. Под ним понимают и техническое средство для передачи, обращения и использования информации - электрический, магнитный, оптический сигнал; и физический процесс, представляющий собой материальное воплощение информационного сообщения - изменение какого-либо параметра носителя информации (напряжения, частоты, мощности электромагнитных колебаний, интенсивности светового потока и т.п.) во времени, в пространстве или в зависимости от изменения значений каких-либо других аргументов (независимых переменных); и смысловое содержание определенного физического состояния или процесса, как, например, сигналы светофора, звуковые предупреждающие сигналы и т.п. Все эти понятия объединяет конечное назначение сигналов. Это определенные сведения, сообщения, информация о каких-либо процессах, состояниях или физических величинах объектов материального мира, выраженные в форме, удобной для передачи, обработки, хранения и использования этих сведений.
Термин “сигнал” очень часто отождествляют с понятиями “данные” (data) и “информация” (information). Действительно, эти понятия взаимосвязаны и не существуют одно без другого, но относятся к разным категориям.
Понятие информации имеет много определений, от наиболее широкого (информация есть формализованное отражение реального мира) до практического (сведения и данные, являющиеся объектом хранения, передачи, преобразования, восприятия и управления). В настоящее время мировая наука все больше склоняется к точке зрения, что информация, наряду с материей и энергией, принадлежит к фундаментальным философским категориям естествознания и относится к одному из свойств объективного мира, хотя и несколько специфичному. Что касается “данных” (от латинского datum – факт), то это совокупность фактов, результатов наблюдений, измерения каких-либо физических свойств объектов, явлений или процессах материального мира, представленных в формализованном виде, количественном или качественном. Это не информация, а только атрибут информации - сырье для получения информации путем соответствующей обработки и интерпретации (истолкования).
Наука и техника интернациональны, и используют, в основном, общепринятые термины, большинство из которых англоязычны. Термин "signal" в мировой практике является общепринятым для характеристики формы представления данных, при которой данные рассматриваются как результат некоторых измерений объекта исследований в виде последовательности значений скалярных величин (аналоговых, числовых, графических и пр.) в зависимости от изменения каких-либо переменных значений (времени, энергии, температуры, пространственных координат, и пр.). С учетом этого, в дальнейшем под термином “сигнал” в узком смысле этого слова будем понимать каким-либо образом упорядоченное отображение изменения физического состояния какого-либо объекта – материального носителя сигнала. На это формализованное отображение переносятся данные о характере изменения в пространстве, во времени или по любой другой переменной определенных физических величин, физических свойств или физического состояния объекта исследований. А так как данные содержат информацию, как об основных целевых параметрах объекта исследований, так и о различных сопутствующих и мешающих факторах измерений, то в широком смысле этого слова можно считать, что сигнал является носителем общей измерительной информации. При этом материальная форма носителей сигналов (механическая, электрическая, магнитная, акустическая, оптическая и любая другая), равно как и форма отображения данных в каких-либо физических параметрах или процессах носителей, значения не имеет. Информативным параметром сигнала может являться любой параметр носителя сигнала, функционально и однозначно связанный со значениями информационных данных.
Наиболее распространенное представление сигналов - в электрической форме в виде зависимости напряжения от времени U(t). Так, например, сигнал изменения напряженности магнитного поля по профилю аэросъемки – это и временная последовательность изменения электрического напряжения на выходе датчика аэромагнитометра, и запись этого напряжения на ленте регистратора, и последовательные значения цифровых отсчетов при обработке лент регистратора и вводе сигнала в ЭВМ.
 Рис. 1.1.1. Сигнал. Рис. 1.1.1. Сигнал. |
С математической точки зрения сигнал представляет собой функцию, т.е. зависимость одной величины от другой, независимой переменной. По содержанию это информационная функция, несущая сообщение о физических свойствах, состоянии или поведении какой-либо физической системы, объекта или среды, а целью обработки сигналов можно считать извлечение определенных информационных сведений, которые отображены в этих сигналах (кратко - полезная или целевая информация) и преобразование этих сведений в форму, удобную для восприятия и дальнейшего использования.
Под "анализом" сигналов (analysis) имеется в виду не только их чисто математические преобразования, но и получение на основе этих преобразований выводов о специфических особенностях соответствующих процессов и объектов. Целями анализа сигналов обычно являются:
- Определение или оценка числовых параметров сигналов (энергия, средняя мощность, среднее квадратическое значение и пр.).
- Разложение сигналов на элементарные составляющие для сравнения свойств различных сигналов.
- Сравнение степени близости, "похожести", "родственности" различных сигналов, в том числе с определенными количественными оценками.
Математический аппарат анализа сигналов весьма обширен, и широко применяется на практике во всех без исключения областях науки и техники.
С понятием сигнала неразрывно связан термин регистрации сигналов, использование которого также широко и неоднозначно, как и самого термина сигнал. В наиболее общем смысле под этим термином можно понимать операцию выделения сигнала и его преобразования в форму, удобную для дальнейшего использования. Так, при получении информации о физических свойствах каких-либо объектов, под регистрацией сигнала понимают процесс измерения физических свойств объекта и перенос результатов измерения на материальный носитель сигнала или непосредственное энергетическое преобразование каких-либо свойств объекта в информационные параметры материального носителя сигнала (как правило - электрического). Но так же широко термин регистрации сигналов используют и для процессов выделения уже сформированных сигналов, несущих определенную информацию, из суммы других сигналов (радиосвязь, телеметрия и пр.), и для процессов фиксирования сигналов на носителях долговременной памяти, и для многих других процессов, связанных с обработкой сигналов.
Применительно к настоящему курсу под термином регистрации будем понимать регистрацию данных (data logging) которые проходят через конкретную систему или точку системы и определенным образом фиксируются на каком-либо материальном носителе или в памяти системы. Что касается процесса получения информации при помощи технических средств, обеспечивающих опытным путем нахождение соотношения измеряемой величины с принятой по определению образцовой единицей этой величины, и представление измеренного соотношения в какой-либо физической или числовой форме информационного сигнала, то для этого процесса будем применять, в основном, термин детектирования.
Шумы и помехи (noise). При детектировании сигналов, несущих целевую для данного вида измерений информацию, в сумме с основным сигналом одновременно регистрируются и мешающие сигналы - шумы и помехи самой различной природы (рис. 1.1.2). К помехам относят также искажения полезных сигналов при влиянии различных дестабилизирующих факторов на процессы измерений, как, например, влияние микрокаверн в стенках скважины на измерения в рентгенорадиометрических методах каротажа, грозовых разрядов на электроразведочные методы измерений и т.п. Выделение полезных составляющих из общей суммы зарегистрированных сигналов или максимальное подавление шумов и помех в информационном сигнале при сохранении его полезных составляющих является одной из основных задач первичной обработки сигналов (результатов наблюдений).
 Рис. 1.1.2. Сигнал с помехами. Рис. 1.1.2. Сигнал с помехами. |
Типы помех разделяют по источникам их возникновения, по энергетическому спектру, по характеру воздействия на сигнал, по вероятностным характеристикам и другим признакам.
Источники помех бывают внутренние и внешние.
Внутренние шумы могут быть присущи физической природе источников сигналов, как, например, тепловые шумы электронных потоков в электрических цепях или дробовые эффекты в электронных приборах, или возникают в измерительных устройствах и системах передачи и обработки сигналов от влияния различных дестабилизирующих факторов - температуры, повышенной влажности, нестабильности источников питания, влияния механических вибраций на гальванические соединения, и т.п.
Внешние источники шумов бывают искусственного и естественного происхождения. К искусственным источникам помех относятся индустриальные помехи - двигатели, переключатели, генераторы сигналов различной формы и т.д. Естественными источниками помех являются молнии, флюктуации магнитных полей, всплески солнечной энергии, и т.д.
Электрические и магнитные поля различных источников помех вследствие наличия индуктивных, емкостных и резистивных связей создают на различных участках и цепях сигнальных систем паразитные разности потенциалов и токи, накладывающиеся на полезные сигналы.
Помехи подразделяются на флюктуационные, импульсные и периодические. Флюктуационные или шумовые помехи представляют хаотический и беспорядочный во времени процесс в виде нерегулярных случайных всплесков различной амплитуды. Как правило, флюктуационные помехи распределены по нормальному закону с нулевым средним и оказывают существенное влияние только на сигналы низкого уровня.
Импульсные помехи во многом похожи на шумовые помехи и проявляются как в виде отдельных импульсов, так и в виде последовательности импульсов, форма и параметры которых имеют случайный характер. Причинами импульсных помех являются резкие броски тока и напряжения в промышленных установках, транспортных средствах, а также природные электрические явления. Распределение импульсных помех, как правило, симметричное с произвольной плотностью распределения.
Периодические помехи вызываются периодическими низкочастотными или высокочастотными полями линий электропередач, силовых электроустановок и др. Если основная мощность помех сосредоточена на отдельных участках диапазона частот, например, на частоте напряжения промышленной сети или кратна этой частоте, то такие помехи называют сосредоточенными.
В зависимости от характера воздействия на сигнал помехи разделяют на аддитивные и мультипликативные. Аддитивные (налагающиеся) помехи суммируются с сигналом, не зависят от его значений и формы и не изменяют информативной составляющей самого сигнала. Мультипликативные или деформирующие помехи могут изменять форму информационной части сигнала, иметь зависимость от его значений и от определенных особенностей в сигнале и т.п. При известном характере мультипликативных помех возможна коррекция сигнала на их влияние.
Следует заметить, что деление сигналов на полезные и мешающие (шумовые) является достаточно условным. Источниками мешающих сигналов также могут быть определенные физические процессы, явления или объекты. При выяснении природы мешающих сигналов они могут переводиться в разряд информационных. Так, например, вариации диаметра скважин является мешающим фактором практически для всех ядерно-физических методов каротажа. Вместе с тем этот же фактор, при соответствующем методическом и аппаратурном обеспечении, может дать возможность бесконтактного определения диаметра скважин в качестве дополнительного информационного параметра.
Размерность сигналов. Простейшими сигналами геофизической практики являются одномерные сигналы, как, например, сейсмические импульсы s(t), измерения каких-либо параметров геофизических полей (электрических, магнитных, и пр.) по профилям на поверхности земли s(x) или по стволу скважины s(h), и т.п. Значения одномерных сигналов зависят только от одной независимой переменной, как, например, на рис. 1.1.1 и 1.1.2.
 Рис. 1.1.3. Двумерный сигнал. Рис. 1.1.3. Двумерный сигнал. |
В общем случае сигналы являются многомерными функциями пространственных, временных и прочих независимых переменных - сейсмическая волна вдоль линии профиля s(x,t), аномалия гравитационного поля на поверхности наблюдений s(x,y), пространственно - энергетическое распределение потока ионизирующих частиц или квантов от источника излучения s(x,y,z,Е) и т.п. Все большее применение находят также многомерные сигналы, образованные некоторым множеством одномерных сигналов, как, например, комплексные каротажные измерения нескольких физических параметров горных пород по стволу скважины одновременно.
Многомерные сигналы могут иметь различное представление по своим аргументам. Так, полный акустический сигнал сейсмического профиля дискретен по пространству (точкам расположения приемников) и непрерывен по времени.
Многомерный сигнал может рассматриваться, как упорядоченная совокупность одномерных сигналов. С учетом этого при анализе и обработке сигналов многие принципы и практические методы обработки одномерных сигналов, математический аппарат которых развит достаточно глубоко, распространяются и на многомерные сигналы. Физическая природа сигналов для математического аппарата их обработки значения не имеет.
Вместе с тем обработка многомерных сигналов имеет свои особенности, и может существенно отличаться от одномерных сигналов в силу большего числа степеней свободы. Так, при дискретизации многомерных сигналов имеет значение не только частотный спектр сигналов, но и форма растра дискретизации. Пример не очень полезной особенности - многомерные полиномы сигнальных функций, в отличие от одномерных, не разлагаются на простые множители. Что касается порядка размерности многомерных сигналов, то ее увеличение выше двух практически не изменяет принципы и методы анализа данных, и сказывается, в основном, только на степени громоздкости формул и чисто техническом усложнении вычислений.
Учитывая эти факторы, при рассмотрении общей теории анализа, преобразований и обработки сигналов ограничимся, в основном, одно- и двумерными сигнальными функциями, а в качестве универсальных независимых переменных (аргументов функций) будем использовать, как правило, переменную "t" для одномерных сигналов и переменные "x,t" или "x,y" для двумерных сигналов, безотносительно к их физическому содержанию (пространство, время, энергия и пр.).
Математическое описание сигналов. Сигналы могут быть объектами теоретических исследований и практического анализа только в том случае, если указан способ их математического описания. Математическое описание позволяет абстрагироваться от физической природы сигнала и материальной формы его носителя, проводить классификацию сигналов, выполнять их сравнение, устанавливать степень тождества, моделировать системы обработки сигналов.
Большинство сигналов, встречающихся на практике, представлены во временной области функциями времени. При отображении сигналов на графике одной из координат (независимой) является ось времени, а другой координатой (зависимой) – ось амплитуд. Тем самым мы получаем амплитудно-временное представление сигнала. В общем случае описание сигнала задается функциональной зависимостью определенного информационного параметра сигнала от независимой переменной (аргумента) – s(х), y(t) и т.п. Такая форма описания и графического представления сигналов называется динамической (сигнал в реальной динамике его поведения по аргументам). Функции математического описания сигналов могут быть как вещественными, так и комплексными. Выбор математического аппарата описания определяется простотой и удобством его использования при анализе и обработке сигналов.
Отметим двойственность применения описания сигналов функциями типа s(t) и т.п. С одной стороны s(t) – это величина, равная значению функции в момент времени t. С другой стороны мы обозначаем через s(t) и саму функцию, т.е. то правило, по которому каждому значению t ставится в соответствие определенная величина s. В большинстве аналитических выражений это не вызывает недоразумений и при однозначном соответствии значений сигналов их аналитическим выражениям принимается по умолчанию.
Сделаем также одно замечание по терминологии описания сигналов. В теоретических работах по анализу сигналов конкретные значения величины сигнала (отсчеты значений по аргументу) часто именуют координатами сигнала. В отраслях знаний, связанных с геологией и горным делом, и в геофизической практике в том числе, этот термин используется по своему прямому смысловому назначению – пространственных координат результатов измерений, и является неизменным атрибутом всех геолого-геофизических данных. С учетом последнего фактора условимся применять термин “координата” по своему традиционному смысловому назначению в качестве обобщающего термина для независимых переменных сигнальных функций. При этом под понятием координат значений сигнала будем понимать не только какие-либо пространственные координаты, как это непосредственно имеет место для результатов измерений при геолого-геофизических съемках, но и любые другие аргументы, на числовой оси которых отложены значения или отсчеты сигнала и рассматривается динамика его изменения (пример на рис. 1.1.1).
Спектральное представление сигналов. Кроме привычного динамического представления сигналов и функций в виде зависимости их значений от определенных аргументов (времени, линейной или пространственной координаты и т.п.) при анализе и обработке данных широко используется математическое описание сигналов по аргументам, обратным аргументам динамического представления. Так, например, для времени обратным аргументом является частота. Возможность такого описания определяется тем, что любой сколь угодно сложный по своей форме сигнал, не имеющий разрывов второго рода (бесконечных значений на интервале своего задания), можно представить в виде суммы более простых сигналов, и, в частности, в виде суммы простейших гармонических колебаний, что выполняется при помощи преобразования Фурье. Соответственно, математически разложение сигнала на гармонические составляющие описывается функциями значений амплитуд и начальных фаз колебаний по непрерывному или дискретному аргументу – частоте изменения функций на определенных интервалах аргументов их динамического представления. Совокупность амплитуд гармонических колебаний разложения называют амплитудным спектром сигнала, а совокупность начальных фаз – фазовым спектром. Оба спектра вместе образуют полный частотный спектр сигнала, который по точности математического представления тождественен динамической форме описания сигнала.
Линейные системы преобразования сигналов описываются дифференциальными уравнениями, причем для них верен принцип суперпозиции, согласно которому реакция систем на сложный сигнал, состоящий из суммы простых сигналов, равна сумме реакций от каждого составляющего сигнала в отдельности. Это позволяет при известной реакции системы на гармоническое колебание с определенной частотой определить реакцию системы на любой сложный сигнал, разложив его в ряд гармоник по частотному спектру сигнала. Широкое использование гармонических функций при анализе сигналов объясняется тем, что они являются достаточно простыми ортогональными функциями и определены при всех значениях непрерывных переменных. Кроме того, они являются собственными функциями времени, сохраняющими свою форму при прохождении колебаний через любые линейные системы и системы обработки данных с постоянными параметрами (изменяются только амплитуда и фаза колебаний). Немаловажное значение имеет и то обстоятельство, что для гармонических функций и их комплексного анализа разработан мощный математический аппарат.
Примеры частотного представления сигналов приводятся ниже (рис. 1.1.5 – 1.1.12).
Кроме гармонического ряда Фурье применяются и другие виды разложения сигналов: по функциям Уолша, Бесселя, Хаара, полиномам Чебышева, Лаггера, Лежандра и др. Главное условие однозначности и математической идентичности отображения сигналов - ортогональность функций разложения. Но при качественном анализе сигналов могут применяться и неортогональные функции, выявляющие какие-либо характерные особенности сигналов, полезные для интерпретации физических данных.
Математические модели сигналов. Теория анализа и обработки физических данных базируется на математических моделях соответствующих физических полей и физических процессов, на основе которых создаются математические модели сигналов. Математические модели сигналов дают возможность обобщенно, абстрагируясь от физической природы, судить о свойствах сигналов, предсказывать изменения сигналов в изменяющихся условиях, заменять физическое моделирование процессов математическим. С помощью математических моделей имеется возможность описывать свойства сигналов, которые являются главными, определяющими в изучаемых процессах, и игнорировать большое число второстепенных признаков. Знание математических моделей сигналов дает возможность классифицировать их по различным признакам, характерным для того или иного типа моделей. Так, сигналы разделяются на неслучайные и случайные в зависимости от возможности точного предсказания их значений в любые моменты времени. Сигнал является неслучайным и называется детерминированным, если математическая модель позволяет осуществлять такое предсказание. Детерминированный сигнал задается, как правило, математической функцией или вычислительным алгоритмом, а математическая модель сигнала может быть представлена в виде
s = F(t, z, w,…; A, B, C,…),
где s – информативный параметр сигнала; t, z, w, … – независимые аргументы (время, пространственная координата, частота и др.); A, B, C… – параметры сигналов.
Модель должна быть, по возможности, проще, минимизирована по количеству независимых аргументов и адекватна изучаемому процессу, что во многом предопределяет результаты измерений. Рассмотрим этот вопрос на примере геофизических данных.
Под геофизическим полем понимают собственное или индуцированное определенным внешним воздействием распределение какой-либо физической величины, создаваемое геологическим объектом или геологической структурой в пространстве, во времени или по любому другому аргументу (независимой переменной). В простейшем случае геофизический сигнал - это изменение какой-либо составляющей геофизического поля, т.е. сечение поля по одному из аргументов. В пределе все геофизическое поле в целом может рассматриваться как первичный многомерный сигнал в прямом физическом отображении, с которого путем измерений могут сниматься формализованные копии определенных составляющих (сечений) сигнала на материальные носители информации.
Геофизическим полям в определенных условиях их регистрации соответствуют определенные математические модели сигналов, т.е. их описание на каком-либо формальном языке. Математическое описание не может быть всеобъемлющим и идеально точным и, по существу, всегда отображает не реальные объекты, а их упрощенные (гомоморфные) модели. Модели могут задаваться таблицами, графиками, функциональными зависимостями, уравнениями состояний и переходов из одного состояния в другое и т.п. Формализованное описание может считаться математической моделью оригинала, если оно позволяет с определенной точностью прогнозировать состояние и поведение изучаемых объектов путем формальных процедур над их описанием.
Неотъемлемой частью любой математической модели сигнала является область определения сигнала, которая устанавливается интервалом задания независимой переменной. Примеры задания интервала для переменных:
a ≤ x ≤ b, x Î [a, b].
a < y ≤ b, y Î (a, b].
a < z < b, z Î (a, b).
Пространство значений независимой переменной обычно обозначается через индекс R. Так, например, R:=(-¥, +¥), x Î R.
Кроме задания области определения сигнала могут быть также заданы виды численных значений переменных (целые, рациональные, вещественные, комплексные).
Математические модели полей и сигналов на первом этапе обработки и анализа результатов наблюдений должны позволять в какой-то мере игнорировать их физическую природу и возвращать ее в модель только на заключительном этапе интерпретации данных.
Виды моделей сигналов. При анализе физических данных используются два основных подхода к созданию математических моделей сигналов.
Первый подход оперирует с детерминированными сигналами, значения которых в любой момент времени или в произвольной точке пространства (а равно и в зависимости от любых других аргументов) являются априорно известными или могут быть достаточно точно определены (вычислены). Такой подход удобен в прямых задачах геофизики (расчеты полей для заданных моделей сред), в задачах активных воздействий на среду при заранее известных параметрах и форме сигнала воздействия (вибрационная сейсморазведка, электромагнитные методы каротажа и пр.), а также при использовании хорошо известных и достоверных геолого-геофизических данных. Для описания неслучайных сигналов используются также квазидетерминированные модели, в которых значения одного или нескольких параметров априорно неизвестны, и считаются случайными величинами с малой случайной компонентой, влиянием которой можно пренебречь.
Второй подход предполагает случайный характер сигналов, закон изменения которых во времени (или в пространстве) носит случайный характер, и которые принимают конкретные значения с некоторой вероятностью. Модель такого сигнала представляет собой описание статистических характеристик случайного процесса путем задания законов распределения вероятностей, корреляционной функции, спектральной плотности энергии и др.
Случайность может быть обусловлена как собственной физической природой сигналов, что характерно, например, для методов ядерной геофизики, так и вероятностным характером регистрируемых сигналов как по времени или месту их появления, так и по содержанию. С этих позиций случайный сигнал может рассматриваться как отображение случайного по своей природе процесса или физических свойств объекта (процесса), которые определяются случайными параметрами или сложным строением геологической среды, результаты измерений в которой трудно предсказуемы.
Между этими двумя видами сигналов нет резкой границы. Строго говоря, детерминированных процессов и отвечающих им детерминированных сигналов в природе не существует. Даже сигналы, хорошо известные на входе в среду (при внешнем воздействии на нее), по месту их регистрации всегда осложнены случайными помехами, влиянием дестабилизирующих факторов и априорно неизвестными параметрами и строением самой среды. С другой стороны, модель случайного поля часто аппроксимируется методом суперпозиции (сложения) сигналов известной формы. Детерминированные модели могут использоваться и для изучения чисто случайных процессов, если уровень полезного сигнала в этом процессе значительно выше уровня статистических флюктуаций, что имеет место, например, при регистрации ионизирующих излучений от горных пород.
На выбор математической модели поля в том или ином методе геофизики в немалой степени влияет также сложность математического аппарата обработки сигналов и сложившиеся традиции геологической интерпретации результатов наблюдений. Не исключается и изменение модели, как правило, с переводом из вероятностной в детерминированную, в процессе накопления информации об изучаемом явлении или объекте.
Классификация сигналов осуществляется на основании существенных признаков соответствующих математических моделей сигналов.Все сигналы разделяют на две крупных группы: детерминированные и случайные. Классификация сигналов внутри групп приведена на рис. 1.1.4.

Рис. 1.1.4. Классификация сигналов.
С математических позиций группы сигналов обычно называют множествами, в которые объединяют сигналы по какому-либо общему свойству. Принадлежность сигнала s к множеству LР записывается в виде LP = {s; P}, где Р – определенное свойство данного множества сигналов.
Классификация детерминированных сигналов. Обычно выделяют два класса детерминированных сигналов: периодические и непериодические.
К множеству периодических относят гармонические и полигармонические сигналы. Для периодических сигналов выполняется общее условие s(t) = s(t + kT), где k = 1, 2, 3,... - любое целое число (из множества целых чисел I от -∞ до ∞), Т - период, являющийся конечным отрезком независимой переменной. Множество периодических сигналов:
LP = {s(t); s(t+kT) = s(t), -∞ < t < ∞, kÎI}.
  Рис. 1.1.5. Гармонический сигнал и спектр его амплитуд. Рис. 1.1.5. Гармонический сигнал и спектр его амплитуд. |
Гармонические сигналы (синусоидальные), описываются следующими формулами:
s(t) = A×sin (2pfоt+f) = A×sin (wоt+f),
s(t) = A×cos(wоt+j), (1.1.1)
где А, fo, wo, j, f - постоянные величины, которые могут исполнять роль информационных параметров сигнала: А - амплитуда сигнала, fо - циклическая частота в герцах, wо = 2pfо - угловая частота в радианах, j и f- начальные фазовые углы в радианах. Период одного колебания T = 1/fо = 2p/wo. При j = f-p/2 синусные и косинусные функции описывают один и тот же сигнал. Частотный спектр сигнала представлен амплитудным и начальным фазовым значением частоты fо (при t = 0).
Полигармонические сигналы составляют наиболее широко распространенную группу периодических сигналов и описываются суммой гармонических колебаний:
s(t) =  An sin (2pfnt+jn), (1.1.2)
An sin (2pfnt+jn), (1.1.2)
или непосредственно функцией s(t) = y(t ± kTp), k = 1,2,3,..., где Тр - период одного полного колебания сигнала y(t), заданного на одном периоде. Значение fp =1/Tp называют фундаментальной частотой колебаний. Полигармонические сигналы представляют собой сумму определенной постоянной составляющей (fо=0) и произвольного (в пределе - бесконечного) числа гармонических составляющих с произвольными значениями амплитуд An и фаз jn, с периодами, кратными периоду фундаментальной частоты fp. Другими словами, на периоде фундаментальной частоты fp, которая равна или кратно меньше минимальной частоты гармоник, укладывается кратное число периодов всех гармоник, что и создает периодичность повторения сигнала. Частотный спектр полигармонических сигналов дискретен, в связи с чем второе распространенное математическое представление сигналов - в виде спектров (рядов Фурье).
В качестве примера на рис. 1.1.6 приведен отрезок периодической сигнальной функции, которая получена суммированием постоянной составляющей (частота постоянной составляющей равна 0) и трех гармонических колебаний с разными значениями частоты и начальной фазы колебаний. Математическое описание сигнала задается формулой:
s(t) =  Ak×cos(2×p×fk×t+jk),
Ak×cos(2×p×fk×t+jk),
где: Ak = {5, 3, 4, 7} - амплитуда гармоник; fk = {0, 40, 80, 120} - частота в герцах; jk = {0, -0.4, -0.6, -0.8} - начальный фазовый угол колебаний в радианах; k = 0, 1, 2, 3. Фундаментальная частота сигнала 40 Гц.
 Рис. 1.1.6. Модель сигнала. Рис. 1.1.6. Модель сигнала. 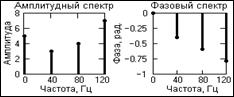 Рис. 1.1.7. Спектр сигнала. Рис. 1.1.7. Спектр сигнала. |
Частотное представление данного сигнала (спектр сигнала) приведено на рис. 1.1.7. Обратим внимание, что частотное представление периодического сигнала s(t), ограниченного по числу гармоник спектра, составляет всего восемь отсчетов и весьма компактно по сравнению с временным представлением.
Периодический сигнал любой произвольной формы может быть представлен в виде суммы гармонических колебаний с частотами, кратными фундаментальной частоте колебаний fр = 1/Тр. Для этого достаточно разложить один период сигнала в ряд Фурье по тригонометрическим функциям синуса и косинуса с шагом по частоте, равным фундаментальной частоте колебаний Df = fp:
s(t) =  (ak cos 2pkDft + bk sin 2pkDft), (1.1.3)
(ak cos 2pkDft + bk sin 2pkDft), (1.1.3)
ao = (1/T)  s(t) dt, ak = (2/T) s(t) cos 2pkDft dt, (1.1.4)
s(t) dt, ak = (2/T) s(t) cos 2pkDft dt, (1.1.4)
bk = (2/T) s(t) sin 2pkDft dt. (1.1.5)
Количество членов ряда Фурье K = kmax обычно ограничивается максимальными частотами fmax гармонических составляющих в сигналах так, чтобы fmax < K·fp. Однако для сигналов с разрывами и скачками имеет место fmax ® ¥, при этом количество членов ряда ограничивается по допустимой погрешности аппроксимации функции s(t).
Одночастотные косинусные и синусные гармоники можно объединить и представить разложение в более компактной форме:
s(t) = Sk cos (2pkDft-jk), (1.1.3')
Sk =  , jk = argtg (bk/ak). (1.1.6)
, jk = argtg (bk/ak). (1.1.6)

Рис. 1.1.8. Прямоугольный периодический сигнал (меандр).
Пример представления прямоугольного периодического сигнала (меандра) в виде амплитудного ряда Фурье в частотной области приведен на рис. 1.1.8. Сигнал четный относительно t=0, не имеет синусных гармоник, все значения jk для данной модели сигнала равны нулю.
Информационными параметрами полигармонического сигнала могут быть как определенные особенности формы сигнала (размах от минимума до максимума, экстремальное отклонение от среднего значения, и т.п.), так и параметры определенных гармоник в этом сигнале. Так, например, для прямоугольных импульсов информационными параметрами могут быть период повторения импульсов, длительность импульсов, скважность импульсов (отношение периода к длительности). При анализе сложных периодических сигналов информационными параметрами могут также быть:
- Текущее среднее значение за определенное время, например, за время периода:
(1/Т)  s(t) dt.
s(t) dt.
- Постоянная составляющая одного периода:
(1/Т) s(t) dt.
- Среднее выпрямленное значение:
(1/Т) |s(t)| dt.
- Среднее квадратичное значение:
 .
.
К непериодическим сигналам относят почти периодические и апериодические сигналы. Основным инструментом их анализа также является частотное представление.
Почти периодические сигналы близки по своей форме к полигармоническим. Они также представляют собой сумму двух и более гармонических сигналов (в пределе – до бесконечности), но не с кратными, а с произвольными частотами, отношения которых (хотя бы двух частот минимум) не относятся к рациональным числам, вследствие чего фундаментальный период суммарных колебаний бесконечно велик.
 Рис. 1.1.9. Почти периодический сигнал и спектр его амплитуд. Рис. 1.1.9. Почти периодический сигнал и спектр его амплитуд. |
Так, например, сумма двух гармоник с частотами 2fo и 3.5fo дает периодический сигнал (2/3.5 – рациональное число) с фундаментальной частотой 0.5fo, на одном периоде которой будут укладываться 4 периода первой гармоники и 7 периодов второй. Но если значение частоты второй гармоники заменить близким значением  fo, то сигнал перейдет в разряд непериодических, поскольку отношение 2/ не относится к числу рациональных чисел. Как правило, почти периодические сигналы порождаются физическими процессами, не связанными между собой. Математическое отображение сигналов тождественно полигармоническим сигналам (сумма гармоник), а частотный спектр также дискретен.
fo, то сигнал перейдет в разряд непериодических, поскольку отношение 2/ не относится к числу рациональных чисел. Как правило, почти периодические сигналы порождаются физическими процессами, не связанными между собой. Математическое отображение сигналов тождественно полигармоническим сигналам (сумма гармоник), а частотный спектр также дискретен.
Апериодические сигналы составляют основную группу непериодических сигналов и задаются произвольными функциями времени. На рис. 1.1.10 показан пример апериодического сигнала, заданного формулой на интервале (0, ¥):
s(t) = exp(-a×t) - exp(-b×t),
где a и b – константы, в данном случае a = 0.15, b = 0.17.
Рис. 1.1.10. Апериодический сигнал и модуль спектра. Рис. 1.1.11. Импульсный сигнал и модуль спектра.
К апериодическим сигналам относятся также импульсные сигналы, которые в радиотехнике и в отраслях, широко ее использующих, часто рассматривают в виде отдельного класса сигналов. Импульсы представляют собой сигналы, как правило, определенной и достаточно простой формы, существующие в пределах конечных временных интервалов. Сигнал, приведенный на рис. 1.1.11, относится к числу импульсных.
Частотный спектр апериодических сигналов непрерывен и может содержать любые гармоники в частотном интервале [0, ¥]. Для его вычисления используется интегральное преобразование Фурье, которое можно получить переходом в формулах (1.1.3) от суммирования к интегрированию при Df ® 0 и kDf ® f.
s(t) =  (a(f) cos 2pft + b(f) sin 2pft) df = S(f) cos(2pft-j(f)) df. (1.1.7)
(a(f) cos 2pft + b(f) sin 2pft) df = S(f) cos(2pft-j(f)) df. (1.1.7)
a(f) = s(t) cos 2pft dt, b(f) = s(t) sin 2pft dt, (1.1.8)
S(f) =  , j(f) = argtg (b(f)/a(f)). (1.1.9)
, j(f) = argtg (b(f)/a(f)). (1.1.9)
Частотные функции a(f), b(f) и S(f) представляют собой не амплитудные значения соответствующих гармоник на определенных частотах, а распределения спектральной плотности амплитуд этих гармоник по частотной шкале. Формулы (1.1.8-1.1.9) обычно называют формулами прямого преобразования Фурье, формулы (1.1.7) – обратного преобразования.
Если нас не интересует поведение сигнала за пределами области его задания [0, Т], то эта область может восприниматься, как один период периодического сигнала, т.е. значение Т принимается за фундаментальную частоту периодический колебаний, при этом для частотной модели сигнала может применяться разложение в ряды Фурье по области его задания (1.1.3-1.1.6).
В классе импульсных сигналов выделяют подкласс радиоимпульсов. Пример радиоимпульса приведен на рис. 1.1.12.
 Рис. 1.1.12. Радиоимпульс и модуль его спектра. Рис. 1.1.12. Радиоимпульс и модуль его спектра. |
Уравнение радиоимпульса имеет вид:
s(t) = u(t) cos(2pfot+jo).
где cos(2pfot+jo) – гармоническое колебание заполнения радиоимпульса, u(t) – огибающая радиоимпульса. Положение главного пика спектра радиоимпульса на частотной шкале соответствует частоте заполнения fo, а его ширина определяется длительностью радиоимпульса. Чем больше длительность радиоимпульса, тем меньше ширина главного частотного пика.
С энергетических позиций сигналы разделяют на два типа: с ограниченной (конечной) энергией и с бесконечной энергией.
Для множества сигналов с ограниченной энергией должно выполняться условие:
L2E = {s;  |s(t)|2 dt < ∞}.
|s(t)|2 dt < ∞}.
О сигналах s(t) данного множества принято говорить, что они интегрируемы с квадратом. Очевидно, что этому множеству могут соответствовать только сигналы, стремящиеся к нулю на бесконечности:  s(t) → 0.
s(t) → 0.
Как правило, к этому типу сигналов относятся апериодические и импульсные сигналы, не имеющие разрывов 2-го рода при ограниченном количестве разрывов 1-го рода. Любые периодические, полигармонические и почти периодические сигналы, а также сигналы с разрывами и особыми точками 2-го рода, уходящими в бесконечность, относятся к сигналам с бесконечной энергией. Для их анализа применяются специальные методы.
Для бесконечных по энергии сигналов, в том числе для периодических, ограничение по энергии может задаваться для определенного интервала (периода) T = t1-t2:
L2E(T) = {s;  |s(t)|2 dt < ∞}.
|s(t)|2 dt < ∞}.
Иногда в отдельный класс выделяют сигналы конечной длительности, отличные от нуля только на ограниченном интервале аргументов (независимых переменных). Такие сигналы обычно называют финитными.
С позиций временной динамики сигналы подразделяются на стационарные и нестационарные. Стационарными называются сигналы, частотный спектр которых не изменяется во времени и не зависит от интервала задания сигналов. К ним относятся периодические и почти периодические сигналы. Большинство практических сигналов являются нестационарными на достаточно больших интервалах задания, но могут содержать в своем составе стационарные частотные составляющие. Так, модулированные сигналы радио и телевидения относятся к числу нестационарных, но имеют стационарные несущие частоты.
Классификация случайных сигналов. Случайным сигналом называют функцию времени, значения которой заранее неизвестны, и могут быть предсказаны лишь с некоторой вероятностью. Случайный сигнал отображает случайное физическое явление или физический процесс, причем, зарегистрированный в единичном наблюдении, сигнал не воспроизводится при повторных наблюдениях и не может быть описан явной математической зависимостью. При регистрации случайного сигнала реализуется только один из возможных вариантов (исходов) случайного процесса, а достаточно полное и точное описание процесса в целом можно произвести только после многократного повторения наблюдений и вычисления определенных статистических характеристик ансамбля реализаций сигнала. В качестве основных статистических характеристик случайных сигналов принимают:
а) закон распределения вероятности нахождения величины сигнала в определенном интервале значений;
б) спектральное распределение мощности сигнала.
Случайные сигналы подразделяют на стационарные и нестационарные. Случайные стационарные сигналы сохраняют свои статистические характеристики в последовательных реализациях случайного процесса. Что касается случайных нестационарных сигналов, то их общепринятой классификации не существует. Как правило, из них выделяют различные группы сигналов по особенностям их нестационарности.
1.2. Типы сигналов [1,10,15]
Выделяют следующие типы сигналов, которым соответствуют определенные формы их математического описания.
 Рис. 1.2.1. Аналоговый сигнал. Рис. 1.2.1. Аналоговый сигнал. |
Аналоговый сигнал (analog signal) является непрерывной функцией непрерывного аргумента, т.е. определен для любого значения аргументов. Источниками аналоговых сигналов, как правило, являются физические процессы и явления, непрерывные в динамике своего развития во времени, в пространстве или по любой другой независимой переменной, при этом регистрируемый сигнал подобен (“аналогичен”) порождающему его процессу. Пример математической записи сигнала: y(t) = 4.8 exp[-(t-4)2/2.8]. Пример графического отображения данного сигнала приведен на рис. 1.2.1, при этом как сама функция, так и ее аргументы, могут принимать любые значения в пределах некоторых интервалов y1 £ y £ y2, t1 £ t £ t2. Если интервалы значений сигнала или его независимых переменных не ограничиваются, то по умолчанию они принимаются равными от -¥ до +¥. Множество возможных значений сигнала образует континуум - непрерывное пространство, в котором любая сигнальная точка может быть определена с точностью до бесконечности. Примеры сигналов, аналоговых по своей природе - изменение напряженности электрического, магнитного, электромагнитного поля во времени и в пространстве.
 Рис. 1.2.2. Дискретный сигнал Рис. 1.2.2. Дискретный сигнал |
Дискретный сигнал (discrete signal) по своим значениям также является непрерывной функцией, но определенной только по дискретным значениям аргумента. По множеству своих значений он является конечным (счетным) и описывается дискретной последовательностью отсчетов (samples) y(nDt), где y1 £ y £ y2, Dt - интервал между отсчетами (интервал или шаг дискретизации, sample time), n = 0, 1, 2,...,N. Величина, обратная шагу дискретизации: f = 1/Dt, называется частотой дискретизации (sampling frequency). Если дискретный сигнал получен дискретизацией (sampling) аналогового сигнала, то он представляет собой последовательность отсчетов, значения которых в точности равны значениям исходного сигнала по координатам nDt.
Пример дискретизации аналогового сигнала, приведенного на рис. 1.2.1, представлен на рис. 1.2.2. При Dt = const (равномерная дискретизация данных) дискретный сигнал можно описывать сокращенным обозначением y(n). В технической литературе в обозначениях дискретизированных функций иногда оставляют прежние индексы аргументов аналоговых функций, заключая последние в квадратные скобки - y[t]. При неравномерной дискретизации сигнала обозначения дискретных последовательностей (в текстовых описаниях) обычно заключаются в фигурные скобки - {s(ti)}, а значения отсчетов приводятся в виде таблиц с указанием значений координат ti. Для числовых последовательностей (равномерных и неравномерных) применяется и следующее числовое описание: s(ti) = {a1, a2,..., aN}, t = t1, t2,...,tN. Примеры дискретных геофизических сигналов - результаты вертикального электрического зондирования (дискретная величина разноса токовых электродов), профили геохимического опробования, и т.п.
Цифровой сигнал (digital signal) квантован по своим значениям и дискретен по аргументу. Он описывается квантованной решетчатой функцией yn = Qk[y(nDt)], где Qk - функция квантования с числом уровней квантования k, при этом интервалы квантования могут быть как с равномерным распределением, так и с неравномерным, например - логарифмическим. Задается цифровой сигнал, как правило, в виде дискретного ряда (discrete series) числовых данных - числового массива по последовательным значениям аргумента при Dt = const, но в общем случае сигнал может задаваться и в виде таблицы для произвольных значений аргумента.
 Рис. 1.2.3. Цифровой сигнал Рис. 1.2.3. Цифровой сигнал |
По существу, цифровой сигнал по своим значениям (отсчетам) является формализованной разновидностью дискретного сигнала при округлении отсчетов последнего до определенного количества цифр, как это показано на рис 1.2.3. Цифровой сигнал конечен по множеству своих значений. Процесс преобразования бесконечных по значениям аналоговых отсчетов в конечное число цифровых значений называется квантованием по уровню, а возникающие при квантовании ошибки округления отсчетов (отбрасываемые значения) – шумами (noise) или ошибками (error) квантования (quantization).
В системах цифровой обработки данных и в ЭВМ сигнал всегда представлен с точностью до определенного количества разрядов, а, следовательно, всегда является цифровым. С учетом этих факторов при описании цифровых сигналов функция квантования обычно опускается (подразумевается равномерной по умолчанию), а для описания сигналов используются правила описания дискретных сигналов. Что касается формы обращения цифровых сигналов в системах хранения, передачи и обработки, то, как правило, они представляет собой комбинации коротких одно- или двуполярных импульсов одинаковой амплитуды, которыми в двоичном коде с определенным количеством числовых разрядов кодируются числовые последовательности сигналов (массивов данных).
 Рис. 1.2.4. Дискретно-аналоговый сигнал Рис. 1.2.4. Дискретно-аналоговый сигнал |
В принципе, квантованными по своим значениям могут быть и аналоговые сигналы, зарегистрированные соответствующей аппаратурой (рис. 1.2.4), которые принято называть дискретно-аналоговыми. Но выделять эти сигналы в отдельный тип не имеет смысла - они остаются аналоговыми кусочно-непрерывными сигналами с шагом квантования, который определяется допустимой погрешностью измерений.
Большинство сигналов, с которыми приходится иметь дело при обработке геофизических данных, являются аналоговыми по своей природе, дискретизированными и квантованными в силу методических особенностей измерений или технических особенностей регистрации, т.е. преобразованными в цифровые сигналы. Но существуют и сигналы, которые изначально относятся к классу цифровых, как, например отсчеты количества гамма-квантов, зарегистрированных по последовательным интервалам времени.
Преобразования типа сигналов. Формы математического отображения сигналов, особенно на этапах их первичной регистрации (детектирования) и в прямых задачах описания геофизических полей и физических процессов, как правило, отражают их физическую природу. Однако последнее не является обязательным и зависит от методики измерений и технических средств детектирования, преобразования, передачи, хранения и обработки сигналов. На разных этапах процессов получения и обработки информации как материальное представление сигналов в устройствах регистрации и обработки, так и формы их математического описания при анализе данных, могут изменяться путем соответствующих операций преобразования типа сигналов.
Операция дискретизации (discretization) осуществляет преобразование аналоговых сигналов (функций), непрерывных по аргументу, в функции мгновенных значений сигналов по дискретному аргументу. Дискретизация обычно производится с постоянным шагом по аргументу (равномерная дискретизация), при этом s(t) Þ s(nDt), где значения s(nDt) представляют собой отсчеты функции s(t) в моменты времени t = nDt, n = 0, 1, 2,..., N. Частота, с которой выполняются замеры аналогового сигнала, называется частотой дискретизации. В общем случае, сетка отсчетов по аргументу может быть произвольной, как, например, s(t) Þ s(tk), k=1, 2, …, K, или задаваться по определенному закону. В результате дискретизации непрерывный (аналоговый) сигнал переводится в последовательность чисел.
Операция восстановления аналогового сигнала из его дискретного представления обратна операции дискретизации и представляет, по существу, интерполяцию данных.
Дискретизация сигналов может приводить к определенной потере информации о поведении сигналов в промежутках между отсчетами. Однако существуют условия, определенные теоремой Котельникова-Шеннона, согласно которым аналоговый сигнал с ограниченным частотным спектром может быть без потерь информации преобразован в дискретный сигнал, и затем абсолютно точно восстановлен по значениям своих дискретных отсчетов.
Как известно, любая непрерывная функция может быть разложена на конечном отрезке в ряд Фурье, т.е. представлена в спектральной форме - в виде суммы ряда синусоид с кратными (нумерованными) частотами с определенными амплитудами и фазами. У относительно гладких функций спектр быстро убывает (коэффициенты модуля спектра быстро стремятся к нулю). Для представления "изрезанных" функций, с разрывами и "изломами", нужны синусоиды с большими частотами. Говорят, что сигнал имеет ограниченный спектр, если после определенной частоты F все коэффициенты спектра равны нулю, т.е. сигнал представляется в виде конечной суммы ряда Фурье.
Теоремой Котельникова-Шеннона устанавливается, что если спектр сигнала ограничен частотой F, то после дискретизации сигнала с частотой не менее 2F можно восстановить исходный непрерывный сигнал по полученному цифровому сигналу абсолютно точно. Для этого нужно выполнить интерполяцию цифрового сигнала "между отсчетами" специальной функцией (Котельникова-Шеннона).
На практике эта теорема имеет огромное значение. Например, известно, что диапазон звуковых сигналов, воспринимаемых человеком, не превышает 20 кГц. Следовательно, при дискретизации записанных звуковых сигналов с частотой не менее 40 кГц мы можем точно восстановить исходный аналоговый сигнал по его цифровым отсчетам, что и выполняется в проигрывателях компакт-дисков для восстановления звука. Частота дискретизации звукового сигнала при записи на компакт-диск составляет 44100 Гц.
Операция квантования или аналого-цифрового преобразования (АЦП; английский термин Analog-to-Digital Converter, ADC) заключается в преобразовании дискретного сигнала s(tn) в цифровой сигнал s(n) = sn » s(tn), n = 0, 1, 2,.., N, как правило, кодированный в двоичной системе счисления. Процесс преобразования отсчетов сигнала в числа называется квантованием по уровню (quantization), а возникающие при этом потери информации за счет округления – ошибками или шумами квантования (quantization error, quantization noise).
При преобразовании аналогового сигнала непосредственно в цифровой сигнал операции дискретизации и квантования совмещаются.
Операция цифро-аналогового преобразования (ЦАП; Digital-to-Analog Converter, DAC) обратна операции квантования, при этом на выходе регистрируется либо дискретно-аналоговый сигнал s(tn), который имеет ступенчатую форму (рис. 1.2.4), либо непосредственно аналоговый сигнал s(t), который восстанавливается из s(tn), например, путем сглаживания.
Так как квантование сигналов всегда выполняется с определенной и неустранимой погрешностью (максимум - до половины интервала квантования), то операции АЦП и ЦАП не являются взаимно обратными с абсолютной точностью.
Алиасинг. А что произойдет, если спектр аналогового сигнала был неограниченным или имел частоту, выше частоты дискретизации?
 Рис. 1.2.5. Появление кажущейся частоты при дискретизации. Рис. 1.2.5. Появление кажущейся частоты при дискретизации. |
Предположим, что при записи акустического сигнала оркестра в помещении от какого-то устройства присутствует ультразвуковой сигнал с частотой 30 кГц. Запись выполняется с дискретизацией сигнала на выходе микрофона с типовой частотой 44.1 кГц. При прослушивании такой записи с использованием ЦАП мы услышим шумовой сигнал на частоте 30 – 44.1/2» 8 кГц. Восстановленный сигнал будет выглядеть так, как если бы частоты, лежащие выше половины частоты дискретизации, "зеркально" от нее отразились в нижнюю часть спектра и сложились с присутствующими там гармониками. Это так называемый эффект появления ложных (кажущихся) частот (aliasing). Эффект аналогичен всем известному эффекту обратного вращения колес автомобиля на экранах кино и телевизоров, когда скорость их вращения начинает превышать частоту смены кадров. Природу эффекта можно наглядно видеть на рис. 1.2.5. Аналогично в главный частотный диапазон дискретных сигналов "отражаются" от частоты дискретизации и все высокочастотные шумы, присутствующие в исходном аналоговом сигнале.
Для предотвращения алиасинга следует повышать частоту дискретизации или ограничить спектр сигнала перед оцифровкой фильтрами низких частот (НЧ-фильтры, low-pass filters), которые пропускают без изменения все частоты, ниже заданной, и подавляют в сигнале частоты, выше заданной. Эта граничная частота называется частотой среза (cutoff frequency) фильтра. Частота среза анти-алиасинговых фильтров устанавливается равной половине частоты дискретизации. В реальные АЦП почти всегда встраивается анти-алиасинговый фильтр.
Графическое отображение сигналов общеизвестно и особых пояснений не требует. Для одномерных сигналов график – это совокупность пар значений {t, s(t)} в прямоугольной системе координат (рис. 1.2.1 – 1.2.4). При графическом отображении дискретных и цифровых сигналов используется либо способ непосредственных дискретных отрезков соответствующей масштабной длины над осью аргумента, либо способ огибающей (плавной или ломанной) по значениям отсчетов. В силу непрерывности геофизических полей и, как правило, вторичности цифровых данных, получаемых дискретизацией и квантованием аналоговых сигналов, второй способ графического отображения будем считать основным.
Тестовые сигналы (test signal). В качестве тестовых сигналов, которые применяются при моделировании и исследовании систем обработки данных, обычно используются сигналы простейшего типа: гармонические синус-косинусные функции, дельта-функция и функция единичного скачка.
Дельта-функция или функция Дирака. По определению, дельта-функция описывается следующими математическими выражениями (в совокупности):
d(t-t) = 0 при t ¹ t,
 d(t-t) dt = 1.
d(t-t) dt = 1.
Функция d(t-t) не является дифференцируемой, и имеет размерность, обратную размерности ее аргумента, что непосредственно следует из безразмерности результата интегрирования. Значение дельта-функции равно нулю везде за исключением точки t, где она представляет собой бесконечно узкий импульс с бесконечно большой амплитудой, при этом площадь импульса равна 1.
Дельта-функция является полезной математической абстракцией. На практике такие функции не могут быть реализованы с абсолютной точностью, так как невозможно реализовать значение, равное бесконечности, в точке t = t на аналоговой временной шкале, т.е. определенной по времени также с бесконечной точностью. Но во всех случаях, когда площадь импульса равна 1, длительность импульса достаточно мала, а за время его действия на входе какой-либо системы сигнал на ее выходе практически не изменяется (реакция системы на импульс во много раз больше длительности самого импульса), входной сигнал можно считать единичной импульсной функцией со свойствами дельта - функции.
При всей своей абстрактности дельта - функция имеет вполне определенный физический смысл. Представим себе импульсный сигнал прямоугольной формы П(t-t) длительностью q, амплитуда которого равна 1/q, а площадь соответственно равна 1. При уменьшении значения длительности q импульс, сокращаясь по длительности, сохраняет свою площадь, равную 1, и возрастает по амплитуде. Предел такой операции при q Þ 0 и носит название дельта - импульса. Этот сигнал d(t-t) сосредоточен в одной координатной точке t = t, конкретное амплитудное значение сигнала не определено, но площадь (интеграл) остается равной 1. Это не мгновенное значение функции в точке t = t, а именно импульс (импульс силы в механике, импульс тока в электротехнике и т.п.) – математическая модель короткого действия, значение которого равно 1.
Дельта-функция обладает фильтрующим свойством. Суть его заключается в том, что если дельта-функция d(t-t) входит под интеграл какой-либо функции в качестве множителя, то результат интегрирования равен значению подынтегральной функции в точке t расположения дельта-импульса, т.е.:
f(t) d(t-t) dt = f(t).

