 2015-07-04
2015-07-04 341
341Детерміновані
Статистичні
Характеризуються набором статистичних параметрів і функцій розподілу. Для їхнього дослідження використовуються методи математичної статистики.
Адаптивні
Використовують для опису об'єкта керування детерміновано-стохастичні методи.
Характер перехідного процесу, а отже, і якість регулювання визначаються динамічними властивостями об’єкта керування, вибраним законом регулювання і настроювальними параметрами регулятора. Раціональний характер перехідного процесу поняття відносне. Необхідний вид перехідного процесу багато в чому зумовлюється вимогами технології керованого об’єкта. У одних випадках важливою вимогою є мінімальний час регулювання, в інших - мінімально можливе динамічне відхилення. Однак при рівнозначних збуреннях зменшення тривалості регулювання неодмінно приведе до більшого динамічного відхилення.
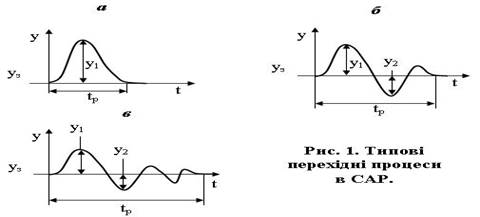
Для вибору конкретного виду перехідного процесу (в залежності від технологічних вимог) запропоновано три їх типи:
· аперіодичний процес з мінімальним часом регулювання (рис. 1 а). - приймають у тих випадках, коли перерегулювання не допускається,
· процес з 20 % перерегулюванням (рис. 1 б) - доцільний, коли перерегулювання допускається, але до нього висуваються вимоги (обмеження);
· процес з мінімальною квадратичною площею відхилення (рис. 1 в) – приймається у випадку, якщо об’єкт регулювання вимагає мінімальної величини динамічного відхилення.
Систе́ма автомати́чного регулюва́ння (САР) — така система автоматичного керування (САК), задача якої полягає у підтримці вихідної величини об'єкта Х на заданому рівні Хзад.
Різновиди САР[ред. • ред. код]
Автоматичні системи можна класифікувати за багатьма ознаками:
· за призначенням (системи керування технологічними режимами, апаратами і машинами),
· за характером керованих величин (системи регулювання температури, густини середовища, тиску та ін.);
· за видом енергії, що використовується для керування (електричні, гідравлічні, пневматичні й ін.) і т.д.
За характером зміни задавального впливу автоматичні системи розділяють на три типи: системи стабілізації, програмні системи і слідкуючі системи.
У залежності від характеру задавальної дії хв (t) (заданого значення керованої величини) розрізняють САР трьох видів:
· система стабілізації,
· система програмного управління,
· слідкуюча система.
Крім того, виділяють системи екстремального регулювання
Лінійними автоматичними системами називають такі системи, які можна описати з достатньою точністю лінійними рівняннями (алгебраїчними, диференціальними, рівняннями в кінцевих різницях і т. д. Лінійні системи поділяють на стаціонарні і нестаціонарні. Параметри лінійних стаціонарних систем незмінні у часі, ці системи описуються лінійними рівняннями з постійними коефіцієнтами. Лінійні нестаціонарні системи мають змінні у часі параметри і описуються лінійними рівняннями із змінними коефіцієнтами.
Нелінійні системи — автоматичні системи, динаміка яких описується нелінійними рівняннями. Більшість автоматичних систем є нелінійними. Нелінійності виникають з різних причин: через наявність зон нечутливості і зони насичення в статичних характеристиках окремих елементів, при включенні в керуючий пристрій системи нелінійних елементів (реле) і т.ін. Якщо нелінійності сильно впливають на динамічні властивості системи, то їх враховують і досліджують систему як нелінійну. Однак у багатьох випадках, особливо в системах із зворотними зв'язками при малих відхиленнях, нелінійності впливають неістотним чином, і такі системи можна вважати лінійними.
Зі схеми (рис. 1) видно, що регулятор виконує функцію зворотного зв’язку (сигнал з виходу об’єкта надходить на його вхід). Зворотний зв’язок, утворений регулятором, звичайно називається головним зворотним зв’язком (ГЗЗ).
Система стабілізації – автоматична система, призначена для підтримки із заданою точністю постійного значення керованої величини.
У цій системі необхідне значення керованої величини постійне, а помилка (розузгодження) в усталеному режимі ΔYуст не повинна перевершувати допустимої величини ΔYдоп.
Система програмного управління - автоматична система, завдання якої полягає в зміні керованої величини за заздалегідь складеною програмою, що визначається задаючим впливом F (t). F (t) - заздалегідь відома функція часу.
Слідкуюча система - автоматична система, завдання якої полягає в зміні керованої величини відповідно до зазделегідь невідомої функції часу, що визначається задаючим впливом F (t).
У слідкуючій системі керована величина повинна слідувати за задавальним впливом, що звичайно є повільно змінюваною, але зазделегідь невідомою функцією часу.
Приклади:
· САР пристроями для обробки виробів на металорізальних верстатах за шаблонами (автоматичні копіювальні верстати).
Да́тчик ти́ску (вимі́рювальний перетво́рювач ти́ску) — пристрій, що дозволяє отримувати і дистанційно передавати сигнал, що відповідає вимірюваномутиску.
Прилади, що поєднують у собі датчик тиску та засіб відображення значення тиску і призначені для вимірювання надлишкового тиску називаютьсяманометрами, або напоромірами, для вимірювання вакуумметричного тиску (нижче атмосферного, розрідження) — вакуумметрами або тягомірами, для одночасного вимірювання надлишкового і вакуумметричного тиску — мановакуумметрами або тягонапорометрами.
Манометри виконують функцію локального контролю і у більшості випадків через відсутність дистанційного доступу до їх показів (за виключенням манометрів з уніфікованим вихідним електричним сигналом) не можуть використовуватись у сучасних засобах автоматизації. Ця функція покладається на вимірювальні перетворювачі тиску.
Ці прилади класифікуються за видом тиску, що вимірюється і типом вихідного сигналу. Вимірювальні перетворювачі тиску розрізняються також, по одиницях вимірювання та за низкою основних технічних характеристик (ГОСТ 22520-85[1]).
За принципом роботи чи способом перетворення вимірюваного тиску у вихідний сигнал датчики тиску поділяються на:
· деформаційні (деформаційні переміщення пружного чутливого елемента (мембрани, сильфони, трубка Бурдона) трансформуються за посередництвом проміжних механізмів і перетворювачів в електричний чи електромагнітний сигнал);
· електричні (вимірюваний тиск, впливаючи на чутливий елемент, змінює його власні електричні параметри: електричний опір, електричну ємність або електричний заряд, котрі стають мірою цього тиску).
В останні роки набули поширення і інші принципи створення вимірювальних перетворювачів тиску: волоконно-оптичні, гальваномагнітні, об'ємного стиску, акустичні, дифузійні та ін.
За видом вимірюваного тиску датчики тиску поділяються на:
· перетворювачі абсолютного тиску;
· перетворювачі надлишкового тиску;
· перетворювачі вакуумметричного тиску;
· перетворювачі надлишкового/вакуумметричного тисків;
· перетворювачі різниці тисків;
· перетворювачі гідростатичного тиску.
За видом вихідного сигналу датчики тиску поділяються на:
· аналогові (вимірюваний тиск перетворюється в аналоговий уніфікований пневматичний чи електричний сигнал);
· цифрові.
Основні діючі датчики тиску належать до аналогових з уніфікованим струмовим сигналом 0…5, 0…20 або 4…20 мА. Останніми роками спостерігається перехід до цифрових датчиків тиску (у тому числі поширення набуває цифровий протокол HART). Бурхливо розвивається системна інтеграція перетворювачів тиску з використанням окремих різновидностей промислових мереж (Modbus, Profibus та ін.). При цьому використовується цифровий протокол обміну інформацією між давачем тиску та системою керування, що суттєво спрощує взаємозамінність приладів різних виробників.








