2015-07-03
2015-07-03 286
286Как правило, необходимость регулирования скорости или момента электроприводов производственных механизмов диктуется требованиями технологического процесса. Например, скорость подачи резца определяет чистоту обработки детали на токарном станке, понижение скорости лифта необходимо для точного позиционирования кабины перед остановкой, необходимость регулирования момента на валу наматывающего устройства диктуется условиями поддержания постоянства усилия натяжения наматываемого материала и т. д.
Однако существует ряд механизмов, для которых изменение скорости по условиям технологии не требуется либо для регулирования используются другие (не электрические) способы влияния на параметры технологического процесса. В первую очередь к ним относятся механизмы непрерывного транспорта для перемещения твердых, жидких и газообразных продуктов: конвейеры, вентиляторы, нагнетатели, насосные установки. Для этих механизмов в настоящее время используются, как правило, нерегулируемые асинхронные электроприводы, которые приводят в движение рабочие органы с постоянной скоростью независимо от загрузки механизмов. При неполной их загрузке как было отмечено ранее, режимы работы с постоянной скоростью характеризуются повышенным удельным расходом электроэнергии по сравнению с номинальным режимом.
Снижение скорости механизмов непрерывного транспорта при недогрузке позволяет выполнить необходимый объем работы с меньшим удельным расходом электроэнергии, т.е. решить чисто экономическую задачу по снижению энергоемкости технологического процесса перемещения продуктов. Обычно при снижении скорости таких механизмов экономический эффект появляется также за счет улучшения эксплуатационных характеристик технологического оборудования. Так, при снижении скорости уменьшается износ тянущего органа транспортера, увеличивается срок службы трубопроводов и арматуры за счет снижения давления, развиваемого машинами для подачи жидкостей и газов, а также устраняется избыточный расход этих продуктов.
Эффект в сфере технологии часто оказывается существенно выше, чем за счет экономии электроэнергии, поэтому принимать решение о целесообразности применения регулируемого электропривода для таких механизмов, оценивая лишь энергетический аспект, принципиально неверно. Оценка эффекта в сфере технологии выходит за рамки данного пособия, поэтому ниже будут рассмотрены лишь пути снижения расхода электроэнергии механизмами непрерывного за счет регулирования скорости их электроприводов и приведено несколько конкретных примеров для сравнения эффектов за счет снижения электропотребления и совершенствования технологического процесса.
Экономия электроэнергии в электроприводе возможна при использовании специфических схемных решений в его силовом канале или применении специальных энергосберегающих законов управления традиционных систем.
Рассмотрены наиболее характерные примеры энергосберегающих технических решений на уровне структурных и принципиальных схем электропривода при его работе в установившихся режимах.
В реальных системах электропривода задача энергетической оптимизации решается, как правило, совместно с другими, традиционными задачами: регулированием скорости, момента, положения и т. п. В приведенных ниже примерах, как правило, выделены лишь те элементы структуры и принципиальных схем, которые используются для повышения энергетической эффективности электроприводов.
|
| Рисунок 2. Схема ленточного конвейера |
Регулирование скорости конвейеров. На рисунке 2. показан ленточный конвейер, движущийся со скоростью J. Движение ленте передается от двигателя M через редуктор P и барабан Б. Момент на валу приводного двигателя конвейера
М = FR/(ip hp), (1)
где F - усилие на приводном барабане; R - радиус барабана;
ip - передаточное отношение редуктора; hp - КПД редуктора. Усилие F на барабане имеет две составляющие:
F = Fx + Fr, (2)
где Fx - усилие, затрачиваемое на перемещение ленты конвейера; Fr - усилие, необходимое для перемещения груза.
Когда груз на конвейере отсутствует, двигатель развивает момент холостого хода
Мx = FxR/(ip hpx), (3)
где hp x - КПД редуктора, соответствующий усилию Fx.
Учитывая свойства механических передач, зависимость момента на валу двигателя от усилия на барабане можно представить следующим образом:
M*= Mx*+ (1 - Mx*)Fr*, (4)
где M* = М/Мн; Mx* = Мх/Мн; Fr*, = Fг / Frн ', Мн - номинальный момент на валу двигателя, необходимый для перемещения ленты и номинального груза при номинальной скорости; Frн - составляющая усилия F в тянущем органе конвейера, возникающая за счет перемещения только номинального полезного груза.
Составляющая Fr тянущего усилия и скорость перемещения v конвейера определяют его производительность:
Q* = Fr*,J* (5)
где Q* = Q/ Qн; Qн - номинальная производительность конвейера. При постоянной номинальной скорости конвейера (J* = 1)
Q*=Fr*, (6)
поэтому потребляемую с вала двигателя мощность можно записать в виде
Р* = М* w* + Мх* + (1 - Мх*) Q* (7)
где Р* = Р/Рн; (w* = w / wн = 1; w = Jiр/R);Рн, wн - номинальная мощность и угловая скорость на валу двигателя.
Из (7) следует, что по мере снижения производительности эффективность работы конвейера уменьшается, так как возрастает относительная доля мощности, расходуемой на преодоление момента холостого хода Мх. Более экономичным является режим работы с переменной скоростью, обеспечивающей ту же производительность, но при постоянстве составляющей усилия Fг=1.
|
В соответствии с (2.66) скорость в этом случае должна изменяться по закону
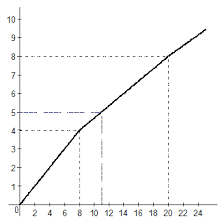
| Рисунок 3. Зависимость мощности на валу электродвигателя от производитель-ности конвейера |
w* = J* = Q*, (8)
которому соответствует мощность на валу двигателя
Р¢* = М* w* + Мх* + (1 - Мх*) Q* = Q* (9)
На рисунке 3 показаны зависимости мощности на валу двигателя для конвейера с моментом холостого хода Мх = 0,3 Мн для постоянной (J = сопst) и регулируемой скоростей (F r = сопst) передвижения грузов. Заштрихованная область на рисунке соответствует экономии мощности, получаемой за счет регулирования скорости.
В общем случае этот эффект выражается следующим образом: РD* = Р* - Р¢* = Мх* + (1 - Мх*) (10)
Из (2.68) видно, что эффект от регулирования скорости тем выше, чем больше момент холостого хода и чем значительнее снижается производительность конвейера.
Регулирование скорости лопастных машин. Центробежные механизмы для подачи жидкостей и газов (вентиляторы, насосы, нагнетатели, компрессоры) являются основными общепромышленными механизмами, обладающими в масштабах страны наибольшими потенциальными возможностями для значительного сокращения удельного расхода электроэнергии. Особое положение центробежных механизмов объясняется их массовостью, большой мощностью, как правило, длительным режимом работы. Указанные обстоятельства определяют значительный удельный вес этих механизмов в энергетическом балансе страны.
Суммарная установленная мощность приводных двигателей насосов, вентиляторов, компрессоров составляет около 20% от мощности всех электростанций СНГ, при этом только вентиляторы потребляют около 10% от всей электроэнергии, вырабатываемой в нашей стране.
Эксплуатационные свойства центробежных механизмов представляются в виде зависимостей напора Н от расхода Q (так называемая Q – H характеристика) и мощности Р от расхода Q. Вид этих характеристик весьма разнообразен и в большинстве случаев имеет сложное аналитическое описание. Анализ энергетических показателей центробежных механизмов наиболее удобно провести на примере низконапорного насоса, характеристики Н(Q) и Р(Q) которого приведены на рис.4. С достаточной точностью для инженерных расчетов они описываются соотношениями
Н* = Нх* + (1 - Нх*)Q2*,,
P* = Pх* + (1 - Pх*)Q*, (11)
где Нх* и Pх* - напор и мощность насоса при Q *,= 0.
В установившемся режиме работы напор, создаваемый центробежным механизмом, уравновешивается напором гидро или аэродинамической сети, в которую он подает жидкость, или газ;
При турбулентном движении жидкости или газа характеристику сети обычно представляют в виде
Н* = Нс* + (1 - Нс*)Q2*,, (12)
где Нс* - статическая составляющая напора, определяемая для насосов - геодезической разностью уровней потребителя и насоса; для вентиляторов - естественной тягой для нагнетателей и компрессоров - давлением сжатого газа в сети (резервуаре).
|
Точка пересечения Q – H характеристик насоса и сети определяет параметры Н=Нн и Q = Qн, которые приняты в качестве базовых. Регулирование подачи Q насоса, работающего с постоянной скоростью, обычно осуществляется задвижкой на его выходе и приводит к изменению характеристики сети, в результате чего точке ее пересечения с характеристикой насоса соответствует подача Q А*<1.
| Рисунок 4. Q – H -характеристики насосной установки |
По аналогии с электрическими цепями регулирование расхода задвижкой подобно регулированию тока путем увеличения электрического сопротивления цепи. Очевидно, что такой способ регулирования с энергетической точки зрения не эффективен, так как сопровождается непроизводительными потерями энергии в регулирующих элементах (резисторе, задвижке). Потери на задвижке характеризуются заштрихованной областью на рис. 4 -1.
Так же как и в электрической цепи, более экономично регулирование параметров источника энергии, а не ее потребителя.
В электрических цепях при этом ток нагрузки снижается за счет уменьшения напряжения источника. В гидравлических и аэродинамических сетях аналогичный эффект получается при уменьшении напора, создаваемого механизмом, что реализуется снижением скорости его рабочего колеса.
При изменении скорости рабочие характеристики центробежных механизмов видоизменяются в соответствии с законами подобия, которые имеют следующий вид:
Q* = w*; Н* = w*2; Р* = w*3. (13)
Характеристика д на рисунке 4 обеспечивает требуемую подачу Q А* и в соответствии с законами подобия описывается следующим образом:
Н* = [ Нх* + (1 - Нх*)(Q*/wА*) ] wА*2, (14)
Совместное решение (2.71) и (2.72) позволяет определить скорость рабочего колеса насоса, при которой его характеристика будет проходить через точку А:
wА* = Ö (Нс* + (Нх* - Нс*)Q2А*,/ Нх*. (15)
Анализ этого выражения для произвольных значений Q* и w* приводит к следующим выводам:
если Нс* = 0, то wА* = QА*, т. е. при отсутствии статической составляющей напора скорость рабочего колеса изменяется пропорционально подаче;
если Нс* > 0, то wА* > QА*,, т. е. при наличии статической составляющей напора одинаковая подача обеспечивается при более высокой скорости, чем при Нс* = 0;
минимальное значение скорости, при которой прекращается подача жидкости в сеть (Q* = 0),
wmin* = Ö Нс* / Нх* (16)
откуда следует, что с увеличением статической составляющей напора уменьшается диапазон регулирования скорости насоса.
В соответствии с законами подобия выражение для потребляемой насосом мощности при регулировании скорости имеет вид
P* = [Pх* + (1 - Pх*)Q*,/w*]w*2, (17)
Из (2.73) следует, что при w* = Q* значения P* = w*3 и М * = P* / w* = w*2. Квадратичная зависимость момента от скорости характерна в основном для вентиляторов, так как статическая составляющая напора, определяемая естественной тягой, существенно меньше Нх. При Нс>0 (w* > Q*) значения P* < w* и М *< w*2, т. е. при снижении скорости уменьшение мощности и момента оказывается большим, чем при Нс* = 0. В технической литературе иногда используют приближенную зависимость момента от скорости, которая учитывает это свойство центробежного механизма:
М * = w*n (18)
где n = 2 при Нc =0 и n > 2 при Нc > 0. Показатель степени п можно рассчитать по известной методике. Расчеты и эксперименты показывают, что n = 2 - 5, причем большие его значения характерны для компрессоров, работающих на сеть со значительным противодавлением.
Анализ режимов работы насоса при постоянной и регулируемой скорости показывает, что избыточный расход энергии при (w = сопst) оказывается весьма существенным.
Регулируемый электропривод позволяет значительно сократить расход потребляемой электроэнергии: до 66% в первом и до 41% во втором случае.
На практике этот эффект может оказаться еще более высоким, так как по различным причинам (отсутствие или неисправность задвижек, ручной привод) регулирование задвижками вообще не применяется, что приводит не только к повышению расхода электроэнергии, но и к избыточным напорам и расходам в гидравлической сети.
На практике встречается параллельная работа центробежных механизмов, а сеть часто имеет переменные параметры. Например, аэродинамическое сопротивление шахтной сети изменяется при изменении протяженности забоев, гидродинамическое сопротивление сетей водоснабжения определяется режимом водопотребления, который изменяется в течение суток, и т. д.
При параллельной работе центробежных механизмов возможны два случая: 1) одновременно и синхронно регулируется скорость всех механизмов; 2) регулируется скорость одного механизма либо части механизмов. Если параметры сети постоянны, то в первом случае все механизмы могут рассматриваться как один эквивалентный, для которого справедливы все приведенные соотношения. Во втором случае напор нерегулируемой части механизмов оказывает на регулируемую часть такой же эффект, как противодавление, причем оно весьма существенно (Нс >0,8), поэтому экономия потребляемой мощности здесь не превышает 10 - 15% от номинальной мощности машины.
Переменные параметры сети существенно усложняют анализ совместной работы центробежных механизмов с сетью. Энергетическую эффективность регулируемого электропривода в этом случае можно определить в виде области, границы которой соответствуют предельным значениям параметров сети и скорости центробежного механизма.