 2015-07-03
2015-07-03 21344
213441. Определение транспортной модели.
2. Сбалансированная транспортная модель.
3. Метод потенциалов.
4. Пример решения транспортной задачи.
5. Дополнительные ограничения в задачах транспортного типа.
6. Транспортная задача в сетевой постановке.
7. Доставка груза в кратчайший срок.
Симплекс-метод дает возможность решить любую задачу линейного программирования. Однако существует много методов, которые учитывают конкретные особенности каждой из этих задач, а потому более эффективных. К числу таких задач относятся транспортные задачи.
Под термином "транспортные задачи" понимается широкий круг задач не только транспортного характера. Общим для них является, как правило, распределение ресурсов, находящихся у m производителей (поставщиков), по n потребителям этих ресурсов.
Транспортная задача (ТЗ) является важнейшей частной задачей линейного программирования, имеющей обширные практические приложения не только к проблемам транспорта. Она выделяется в линейном программировании определённостью экономической характеристики, особенностями математической модели, наличием специфических методов решения.
К ЗЛП транспортного типа приходят при рассмотрении различных практических ситуаций, связанных с составлением наиболее экономичного плана перевозок продукции, управления запасами, назначением персонала на рабочие места, оборотом наличного капитала и многими другими.
На транспорте наиболее часто встречаются следующие задачи, относящиеся к транспортным:
- прикрепление потребителей ресурса к производителям;
- привязка пунктов отправления к пунктам назначения;
- взаимная привязка грузопотоков прямого и обратного направлений;
- отдельные задачи оптимальной загрузки промышленного оборудования;
- оптимальное распределение объемов выпуска промышленной продукции между заводами-изготовителями и др.
На рис. 1.11 показано общее представление транспортной задачи в виде сети с m пунктами отправления и n пунктами назначения, которые показаны в виде узлов сети. Дуги, соединяющие узлы сети, соответствуют маршрутам, связывающим пункты отправления и назначения. С дугой (i, j), соединяющей пункт отправления i с пунктом назначения j, соотносятся два вида данных: стоимость cij перевозки единицы груза из пункта i в пункт j и количество перевозимого груза xij. Объем грузов в пункте отправления i равен аi, а объем грузов в пункте назначения j - bj. Задача состоит в определении неизвестных величин хij минимизирующих суммарные транспортные расходы и удовлетворяющих ограничениям, налагаемым на объемы грузов в пунктах отправления (предложения) и пунктах назначения (спрос).
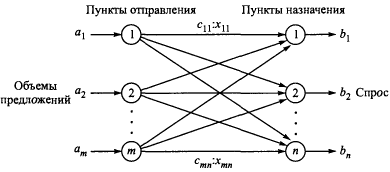
Рис. 1.11. Представление транспортной задачи
Рассмотрим экономико-математическую модель прикрепления пунктов отправления к пунктам назначения. Имеются m пунктов отправления груза A1, A2, Am и объемы отправления по каждому пункту а1, a2, am. Известна потребность в грузах b1, b2, bn по каждому из n пунктов назначения B1, B2, Bn. Задана матрица стоимостей доставки по каждому варианту сij, i = 1, 2, m; j = 1, 2, n. Необходимо рассчитать оптимальный план перевозок, т. е. определить, сколько груза должно быть отправлено из каждого Ai-го пункта отправления (от поставщика) в каждый Bj-й пункт назначения (до потребителя) хij с минимальными транспортными издержками.
В общем виде исходные данные транспортной задачи представлены в табл. 1.8.
Таблица 1. 8. Транспортная таблица
| В1 | В2 | … | Вn |  | ||||
| А1 | x11 | c11 | x12 | c12 | … | x1n | c1n | а1 |
| А2 | x21 | c21 | x22 | c22 | … | x2n | c2n | а2 |
| … | … | … | … | … | … | |||
| Аm | xm1 | cm1 | xm2 | cm2 | … | xmn | cmn | аm |
 | b1 | b2 | … | bn |
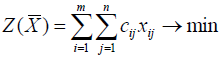
Тогда математическая модель транспортной задачи формулируется следующим образом:
| (7.1) |
при ограничениях
| (7.3) |
| (7.2) |
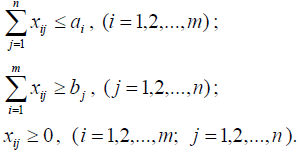
Первое ограничение означают, что суммарный объем перевозок от i -го поставщика не может превышать имеющегося у него запаса товара ai. Второе ограничение означают, что суммарные перевозки товара j-му потребителю должны полностью удовлетворить его потребности в товаре bj. Третье ограничение исключает обратные перевозки.
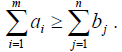
Из первых двух ограничений следует, что:
| (7.4) |
Если имеет место равенство
| (7.5) |
то модель называется сбалансированной транспортной моделью. В сбалансированной модели первые два ограничения имеют вид равенств. В реальных условиях запас товара не всегда равен спросу (потребности), но транспортную модель всегда можно сбалансировать.
В случае превышения запаса над спросом, т.е. если
то вводится фиктивный (n + 1) -й потребитель со спросом
а соответствующие стоимости сi,n+1 (i = 1,2, m) считаются равными нулю.
Аналогично, при
вводится фиктивный (m +1) -й поставщик с запасом товара
а соответствующие стоимости сm + 1,j (j = 1,2, n) считаются равными нулю.
Таким образом, исходная задача сводится к сбалансированной транспортной задачи, из оптимального плана которой получается оптимальный план несбалансированной транспортной задачи.
Отметим, несбалансированную транспортную задачу называют также открытой транспортной задачей, тогда как сбалансированную транспортную задачу - закрытой транспортной задачей. Стремление сбалансировать транспортную задачу обусловлено возможностью применить в этом случае эффективный вычислительный метод.
Наиболее распространенным методом решения транспортных задач является метод потенциалов, который был предложен в 1949 г. советскими математиками Л.В. Канторовичем и М.К. Гавуриным. Позже аналогичный метод разработал американский математик Дж. Данциг, основываясь на общих идеях линейного программирования.
Решение задачи методом потенциалов включает следующие этапы:
- разработку начального плана (опорного решения);
- расчет потенциалов;
- проверку плана на оптимальность;
- поиск максимального звена неоптимальности (если полученный план не оптимальный);
- составление контура перераспределения ресурсов;
- определение минимального элемента в контуре перераспределения и перераспределение ресурсов по контуру;
- получение нового плана.
Описанный алгоритм является итерационным и выполняется до тех пор, пока не будет найдено оптимальное решение.
Число неизвестных переменных xij в транспортной задаче с m поставщиками и n потребителями равно m× n, а число уравнений в системе (7.2) - (7.3) равно m+n. Так как транспортная задача является сбалансированной, т.е. выполняется условие (7.5), то число линейно независимых уравнений равно m+n-1. Следовательно, опорный план транспортной задачи может иметь не более m+n-1 отличных от нуля неизвестных. Если данное условие не выполняется, то план называется вырожденным.
Для транспортной задачи существует несколько методов отыскания начального плана (опорного решения): метод северо-западного угла; метод минимальной стоимости; метод Фогеля и т. д.
Различие этих методов заключается в "качестве" начального решения, т.е. "удаленности" начального решения от оптимального. В общем случае метод Фогеля, предложенный американским ученым, дает наилучшее решение, а метод северо-западного угла – наихудшее. Однако метод северо-западного угла требует меньшего объема вычислений.
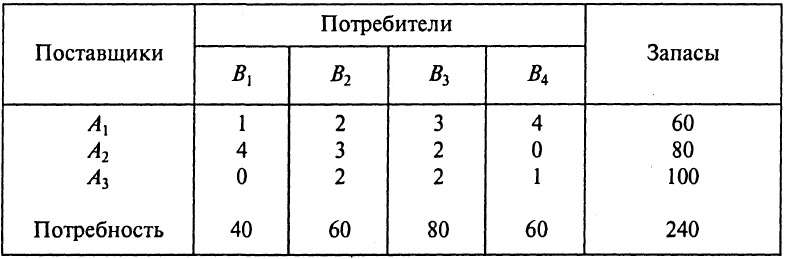
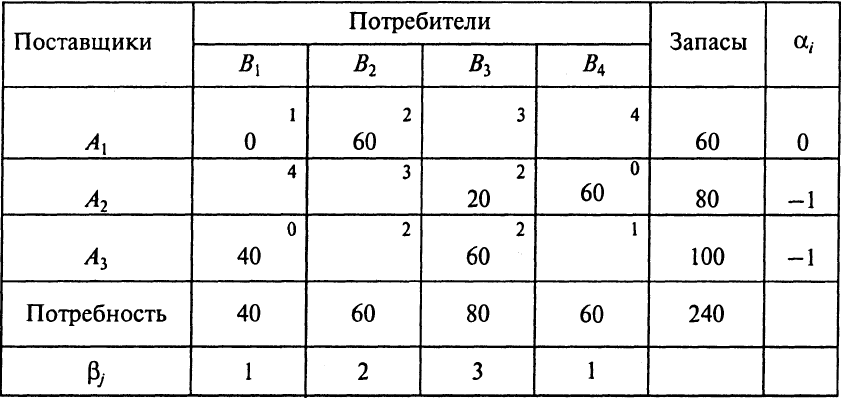
Вычислительный алгоритм метода потенциалов рассмотрим на примере решения конкретной задачи прикрепления трех пунктов отправления (поставщиков) i = 1, 2, 3 к четырем пунктам назначения (потребители) j = 1, 2, 4 в соответствии с исходными данными табл. 1.9.
Таблица 1.9. Исходные данные
Начальный план можно составить одним из перечисленных выше методов. Воспользуемся наиболее простым методом – методом северо-западного угла. В соответствии с этим методом загрузка клеток (определение базисных переменных по распределению объемов пунктов отправления к пунктам назначения) начинается с верхней левой клетки («северо-западная» часть таблицы) и продолжается вниз и вправо (по диагонали).
По указанному правилу загружаем первую клетку на основе следующего условия: х11 = min {а1; b1} = min {60; 40} = 40.
Таким образом, первый пункт назначения загружен, а первый пункт отправления имеет остатки груза Da1 = 60-40 = 20, которые и распределяем на второй пункт назначения: x12 = min {Da1; b2} = min {20; 60} = 20; Db2 = 40.
Продолжая преобразования аналогичным образом, получаем: x22 = min {a2; Db2} = min {80; 40} = 40; Da2 = 40 и т д. Процесс продолжается до тех пор, пока не будут удовлетворены все потребители за счет запасов поставщиков.
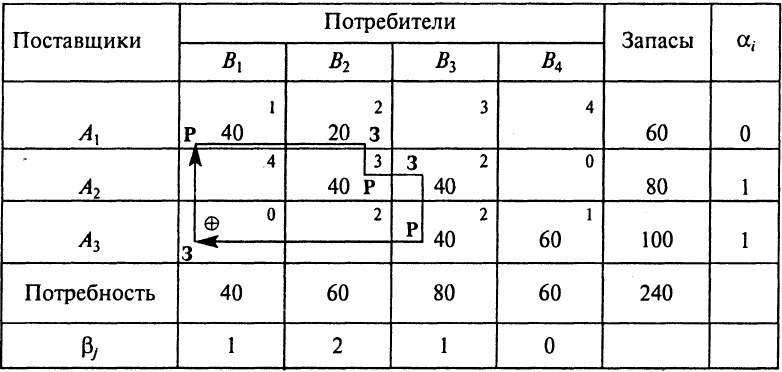
Результаты начального плана и расчета потенциалов представлены в табл. 1.10.
В процессе решения после каждой итерации (в том числе и после получения допустимого решения) по числу загруженных клеток проверяется опорный план на вырожденность, т.е. число загруженных клеток должно быть не больше числа уравнений: N = m + n – 1 = 4 + 3-1 = 6.
Таблица 1.10. Начальный план перевозок
В том случае, если число загруженных клеток меньше числа уравнений, то нужно в любые свободные клетки поставить нули. Клетка, в которой стоит ноль, считается занятой.
Значение целевой функции по результатам расчета допустимого плана:
Z0 = 1 × 40 + 2 × 20 + 3 × 40 + 2 × 40 + 2 × 40 + 1 × 60 = 420.
Расчет потенциалов выполняют по загруженным клеткам, для которых должно выполняться следующее равенство:
αi + βj = сij, (7.6)
где αi потенциал поставщика Аi, который записывают в новом столбце справа от таблицы; βj потенциал потребителя Вj, который записывают в новой строке под таблицей. Данные потенциалы выбирают так, чтобы в любой базисной клетке их сумма равнялась тарифу, т.е. выполнялось равенство (7.6). Так как количество всех потенциалов αi и βj составляет m + n, а занятых клеток m + n - 1, то для определения чисел αi и βj придется решать систему из m + n - 1 уравнений с m + n неизвестными. Поэтому одному из неизвестных потенциалов придают произвольное значение (например, нулевое). Тогда остальные значения определяются однозначно.
Вычисляя потенциалы по выражению (7.6), принимаем для первой строки αi = 0. Используя загруженные клетки (i–j) = (1–1), (1–2), получаем:
α1 + β1 = с11 = 0 + β1 = 1, β1 = 1;
α1 + β2 = с12 = 0 + β2 = 2, β2 = 2.
Далее по загруженным клеткам (2–2), (2–3) определяем другие потенциалы:
α2 + β2 = 3, α2 + 2 = 3, α2 = 1;
α2 + β3 = 2, 1 + β3 = 2, β3 = 1.
Результаты расчета потенциалов для опорного плана представлены в табл. 1.10.
Для проверки оптимальности плана просматривают свободные клетки, для которых определяют оценки Dсij – разность между тарифом клетки и суммой потенциалов строки и столбца, т.е. Dсij = cij-(αi + βj). Экономически оценка Dсij показывает, размер экономии транспортных издержек на 1 ед. перевозимого груза. Если все оценки неотрицательные, т.е. Dсij ≥ 0 или αi + βj ≤ сij, (7.7) то план оптимальный и остается подсчитать транспортные расходы.
По табл. 1.10 осуществляем проверку начального плана на оптимальность:
- (i–j) = (1–3), 0 + 1 ≤3;
- (i–j) = (1–4), 0 + 0 ≤ 4;
- (i–j) = (2–1), 1 + 1 ≤ 4;
- (i–j) = (2–4), 1 + 0 > 0, Dс24 = -1;
- (i–j) = (3–1), 1 + 1 > 0, Dс31 = -2;
- (i–j) = (3–2), 1 + 2 > 2, Dс32 = -1.
Итак, по трем клеткам условие (7.7) не выполняется, следовательно, начальный план требует улучшения. Наибольшую экономию можно получить по клетке (i–j) = (3–1), где Dс31 = -2, так как данное значение больше по абсолютной величине других оценок {Dс24 = -1; Dс32 = -1}. Следовательно, клетку (3-1) необходимо загрузить за счет перераспределения ресурсов из других загруженных клеток. В табл. 1.10 клетку (3–1) помечаем знаком «+», так как здесь в начальном плане находится вершина максимальной неоптимальности.
Контур перераспределения ресурсов составляют по следующим правилам:
- этот контур представляет замкнутый многоугольник с вершинами в загруженных клетках, за исключением клетки с вершиной максимальной неоптимальности «+», и звеньями, лежащими вдоль строк и столбцов матрицы;
- ломаная линия должна быть связанной в том смысле, что из любой ее вершины можно попасть в любую другую вершину по звеньям ломаной цепи (по строке или по столбцу);
- в каждой вершине контура встречаются только два звена, одно из них располагается по строке, другое – по столбцу;
- число вершин контура четное, все они в процессе перераспределения делятся на загружаемые (З) и разгружаемые (Р);
- в каждой строке (столбце) имеются две вершины: одна – загружаемая, другая –разгружаемая.
В клетке максимальной неотимальности намечаем одну из вершин контура и далее по вышеизложенным правилам строим контур, вершины которого будут находиться в клетках (3–1) – (1–1) – (1–2) – (2–2) – (2-3) – (3–3). Вершины контура последовательно подразделяем на загружаемые (3) и разгружаемые (Р), начиная с вершины максимальной неоптимальности «+» (табл. 1.10).
Перераспределение ресурсов по контуру осуществляется с целью получения оптимального плана. В процессе перераспределения ресурсов по контуру в соответствии с условием неотрицательности переменных хij ни одно из этих значений не должно превратиться в отрицательное число. Поэтому анализируют только клетки, помеченные знаком Р, из которых выбирают клетку с минимальным объемом перевозок. В нашем примере Xmin = min{40; 40; 40} = 40. Следовательно, клетки (1–1), (2–2), (3–3) полностью разгружаются. В клетке (1–2) загрузка увеличится на 40 и достигнет 60, в клетке (2–3) загрузка составит 40 + 40 = 80, и клетка (3–1) загрузится на 40 (табл. 1.11).
Таблица 1.11. Первый план перевозок
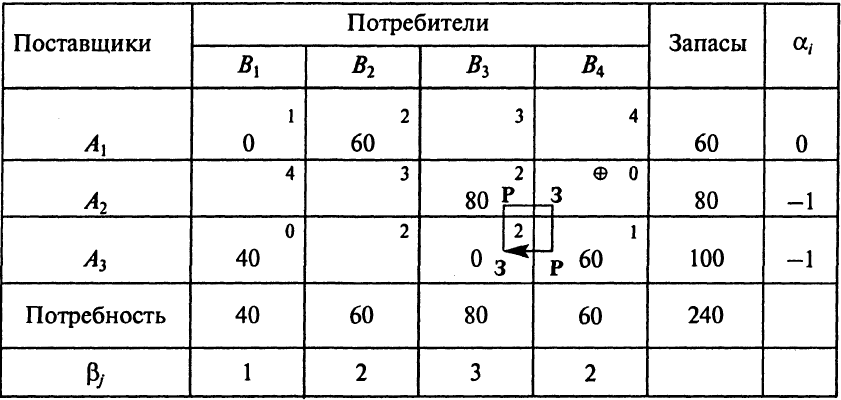
Проверяем условие не вырожденности число уравнений N = m + n - 1 должно быть ровно количеству переменных (числу загруженных клеток). Внашем примере m = 3, n = 4, а число загруженных клеток равно 4, т. е. условие не выполняется и 6 ≠ 4. В процессе перераспределения ресурсов произошла полная разгрузка трех клеток, а должна освободиться только одна клетка. В этом случае следует в две клетки проставить нули (нулевой ресурс) и считать условно их загруженными. Например, в клетки (1–1) и (3–3) проставим нулевой ресурс (рис. 1.11).
По результатам первой итерации имеем:
Z1 = 2 × 60 + 2 × 80 + 1 × 60 + 0 × 40 = 340.
Получение очередного плана (итерации) осуществляется в том же порядке, который был рассмотрен выше, т. е.:
- по загруженным клеткам (в соответствии с новой загрузкой) вычисляются потенциалы αi и βj;
- по незагруженным клеткам производится проверка плана на оптимальность;
- находится вершина максимальной неоптимальности и строится новый контур перераспределения и т. д., до тех пор, пока не будет найдено оптимальное решение, удовлетворяющее неравенству (7.7).
Ниже приведены расчеты по второй итерации. Поиск потенциалов для первого плана следующий:
α1 + β1 = 1,0 + β1 = 1, β1 = 1;
α1 + β2 = 2, 0 + β2 = 2, β2 = 2;
α3 + β1 = 0, α3 + 1 = 0, α3 = -1;
α3 + β3 = 2, -1 + β3 = 2, β3 = 3;
α2 + β3 = 1, α2 + 3 = 2, α2 = -1;
α3 + β4 = 1, -1 + β4 = 1, β4 = 2.
Проведем проверку на оптимальность первого плана:
(i–j) = (1–3), 0+3 ≤ 3;
(i–j) = (1–4), 0+4 < 4;
(i–j) = (2–1), -1+1 < 4;
(i–j) = (2–2), -1+2 < 3;
(i–j) = (3–2), -1+2 < 2;
(i–j) = (2–4), -1+2 > 0.
Клетку (2–4) необходимо загрузить. В соответствии с перераспределением ресурсов по контуру получаем табл. 1.12, для которой вновь рассчитываем потенциалы αi и βj, и последовательность вычислений повторяется.
Таблица 1.12. Оптимальный план перевозок
Для распределения, полученного в табл. 1.12, условие (7.7) выполняется, следовательно, план – оптимальный.
Транспортные издержки по оптимальному плану следующие:
Z2 = 1 × 0 + 2 × 60 + 2 × 20 + 0 × 60 + 0 × 40 + 2 × 60 = 280.
Таким образом, построением начального плана с последующим расчетом двух итераций получено оптимальное решение по прикреплению пунктов отправления грузов к пунктам назначения. Однако рассмотренная задача является классической транспортной задачей и в экономике предприятия такие задачи встречаются крайне редко. Обычно при составлении экономико-математической модели в задачи транспортного типа приходится вводить целый ряд дополнительных ограничений, а затем ее решать методом потенциалов.
Рассмотрим наиболее часто встречающиеся ситуации в экономике предприятия.
1. Отдельные поставки от определенных поставщиков некоторым потребителям должны быть исключены (из-за отсутствия необходимых условий хранения, чрезмерной перегрузки коммуникаций и т. д.). Это ограничение требует, чтобы в матрице перевозок, содержащей оптимальный план, определенные клетки оставались свободными. Последнее достигается искусственным завышением затрат на перевозки сij в клетках, перевозки через которые следует запретить. При этом производят завышение величины сij до таких значений, которые будут заведомо больше всех, с которыми их придется сравнивать в процессе решения задачи.
2. На предприятии необходимо определить минимальные суммарные затраты на производство и транспортировку продукции. С подобной задачей сталкиваются при решении вопросов, связанных с оптимальным размещением производственных объектов. Здесь может оказаться экономически более выгодным доставлять сырье из более отдаленных пунктов, но зато при меньшей его себестоимости. В таких задачах за критерий оптимальности принимают сумму затрат на производство и транспортировку продукции.
3. Ряд транспортных маршрутов, по которым необходимо доставить грузы, имеют ограничения по пропускной способности. Если, например, по маршруту Ai – Bj можно провести не более q единиц груза, то Bj столбец матрицы разбивается на два столбца – B'j и B''j. В первом столбце спрос принимается равным разности между действительным спросом bj и ограничением q: b'j = bj-q, во втором – равным ограничению q, т. е. b''j = q. Затраты сij в клетке второго столбца равны данным, но в клетке первого столбца вместо истинного тарифа сij ставится искусственно завышенный тариф М (клетка блокируется). Затем задача решается обычным способом.
4. Поставки по определенным маршрутам обязательны и должны войти в оптимальный план независимо от того, выгодно это или нет. В этом случае уменьшают запас груза у поставщиков и спрос потребителей и решают задачу относительно тех поставок, которые необязательны. Полученное решение корректируют с учетом обязательных поставок.
5. Экономическая задача не является транспортной, но в математическом отношении подобна транспортной, так как описывается аналогичной моделью, например распределение производства изделий между предприятиями, оптимальное закрепление механизмов по определенным видам работы.
6. Необходимо максимизировать целевую функцию задачи транспортного типа. В этой ситуации при составлении опорного плана в первую очередь стараются заполнить клетки с наиболее высокими значениями показателей сij. Выбор клетки, подлежащей заполнению при переходе от одного допустимого плана к другому, должен производиться не по минимальной отрицательной разнице [сij-(αi + βj)], а по максимальной этой разнице. Оптимальным будет план, которому в последней таблице сопутствуют свободные клетки с неположительными элементами: все разности [сij -(αi + βj)] ≤ 0.
7. Необходимо в одно время распределить груз различного рода по потребителям. Задачи данного типа называются многопродуктовыми транспортными задачами. В этих задачах поставщики m родов грузов разбиваются на m условных поставщиков, а потребители n родов грузов разбиваются на n условных потребителей. С учетом этой разбивки составляют полную транспортную таблицу. При этом заметим, что некоторые маршруты AiBj должны быть блокированы (закрыты), поскольку в данной постановке задачи грузы разного рода не могут заменять друг друга.
Этим маршрутам AiBj должна соответствовать очень высокая стоимость перевозки. Многопродуктовую задачу не всегда обязательно описывать одной моделью. Например, если поставки грузов различного рода независимы, то задачу можно представить в виде комплекса транспортных задач по каждому роду груза. Однако, если между грузами различного рода существует связь (например, одни из грузов можно заменить другими), то в общем случае исходную модель (задачу) не удается разбить на комплекс простых транспортных задач.
В практической деятельности могут возникнуть ситуации, когда нас в первую очередь интересуют не затраты на перевозку груза (их минимизация), а время доставки этих грузов потребителям. Например, при подготовке крупных военных операций, когда необходимо в кратчайший срок сосредоточить ресурсы в намеченных пунктах или при стихийных бедствиях (землетрясение, ураганы и т. п.), возникает задача обеспечения пострадавших районов различными ресурсами в кратчайший срок.
Для решения подобных задач рассмотренный ранее метод потенциалов непригоден. Эти задачи решаются с помощью специального алгоритм. Смысл этих алгоритмом состоит в построении любым способом опорного плана построении разгрузочных циклов для клеток транспортной таблицы с критическим временем перевозки.
Если условия транспортной задачи заданы в виде схемы, на которой условно изображены поставщики, потребители и связывающие их дороги, указаны величины запасов груза и потребности в нем, а также транспортные издержки по доставке грузов, то говорят, что транспортная задача поставлена в сетевой форме.
В таких задачах сетевой формы пункты расположения поставщиков и потребителей изображают вершинами (узлами) сети, запасы груза записывать в вершинах положительными, а потребности – отрицательными числами. Дороги, связывающие пункты расположения и потребления груза, изображают линиями и называют ребрами (дугами, звеньями) сети.
Различия между транспортными задачами в матричной и сетевой формах весьма незначительны, так как методы решения их основаны на одних и тех же идеях (метод потенциалов).
Литература
1. Бережная Е. В. Математические методы моделирования экономических систем: учеб. пособие. – 2-е изд., перераб. и доп. / Е. В. Бережная, В. И. Бережной. – М.: Финансы и статистика, 2006. – 432 с.
2. Стариков А. В. Экономико-математическое и компьютерное моделирование [Текст]: учеб. пособие / А. В. Стариков, И. С. Кущева; Фед. агентство по образованию, ГОУ ВПО «ВГЛТА». – Воронеж, 2008. – 132 с.
3. Большакова И.В. Линейное программирование: учебно-метод. пособие к контрольной работе для студ. эконом. факультета / И.В. Большакова, М.В. Кураленко. – Мн.: БНТУ. 2004. – 148 с.
4. Таха Хемди А. Введение в исследование операций, 7-е издание: пер. с англ. – М.: Издательский дом "Вильяме", 2005. – 912 с.
5. Грешилов А.А. Прикладные задачи математического программирования: учебное пособие. – 2-е изд. – М.: Логос, 2006. – 288 с.

