 2015-07-21
2015-07-21 2590
2590| Элемент сети | Наименование параметра | Условное обозначение параметра |
| Событие i | Ранний срок свершения события Поздний срок свершения события Резерв времени события | t р(i) t п(i) R (i) |
| Работа (i,j) | Продолжительность работы Ранний срок начала работы Ранний срок окончания работы Поздний срок начала работы Поздний срок окончания работы Полный резерв времени работы Частный резерв времени работы первого вида Частный резерв времени работы второго вида или свободный резерв времени работы Независимый резерв времени работы | t (i,j) t рн(i,j) t ро(i,j) t пн(i,j) t по(i,j) R п(i,j) R 1(i,j) R с(i,j) R н(i,j) |
| Путь L | Продолжительность пути Продолжительность критического пути Резерв времени пути | t (L) t кр R (L) |
Еслисобытиеимеетнесколько предшествующих путей, а, следовательно,инесколько предшествующих событий i, торанний срок свершения события j удобно находить поформуле:
 (2.3)
(2.3)
где m – множество индексов (кодов) событий, непосредственно предшествующих событию j;
 - ранние сроки наступления соответственно i- го и j- го событий.
- ранние сроки наступления соответственно i- го и j- го событий.
Расчет параметра осуществляется последовательно, начиная с исходного события, для которого ранний срок его свершения принимается равным нулю, т.е. t p(0) = 0. (Обычно исходному событию присваивается нулевой номер). При этом для нахождения t p(i) необходимо ко всем ранним срокам предшествующих событий прибавить продолжительности работ, предшествующих i- му событию, и из полученных сумм взять наибольшую.
Задержка свершения события по отношению к своему раннему сроку не отразится на сроке свершения завершающего события (а значит, и на сроке выполнения всего комплекса работ) до тех пор, пока сумма срока свершения этого события и продолжительности (длины) максимального из последующих заним путей не превысит длины критического пути.
Поэтому поздний (или предельный) срок t п (i) свершения i-го события определяется как разность между продолжительностью критического пути t кр и продолжительностью самого длинного пути от i- го события до завершающего:
 (2.4)
(2.4)
где  - любой путь, следующий за i- м событием, т.е.путь от i-го до завершающего события сети.
- любой путь, следующий за i- м событием, т.е.путь от i-го до завершающего события сети.
Если событие i имеет несколько последующий путей, а, следовательно, и несколько последующих событий j, то поздний срок свершения события i -го удобно находить по следующей формуле:
 (2.5)
(2.5)
где m – множество индексов j, непосредственно следующих за i.
Расчет поздних сроков наступления событий осуществляется последовательно, начиная с завершающего события. При этом из всех поздних сроков наступления последующих событий необходимо вычесть соответствующие продолжительности работ и из полученных разностей взять наименьшую. При расчете необходимо помнить, что для завершающего события существует только один срок его наступления – ранний t p (n), однако, для удобства вычислений, и для завершающего события условно вводится понятие «позднего срока его свершения», за величину которого принимается ранний срок, t п (n) = t p (n). Поздний срок наступления исходного события всегда равен нулю, что вытекает из формулы (2.4).
Резерв времени R(i) i -го события определяется как разность между поздним и ранним сроками его свершения:
R (i) = t п(i) - t р(i). (2.6)
Резерв времени события показывает, на какой предельно допустимый период времени можно задержать наступление этого события, не вызывая при этом увеличения срока выполнения всего комплекса работ.
Критические события резервов времени не имеют, так как любая задержка в свершении события, лежащего на критическом пути, вызовет такую же задержку в свершении завершающего события. Из этого следует, что для того, чтобы определить длину и топологию критического пути, вовсе не обязательно перебирать все полные пути сетевого графика и определять их длины.
Определив ранний срок наступления завершающего события сети, мы тем самым определяем длину критического пути, а выявив события с нулевыми резервами времени, определяем его топологию. При этом если сетевой график имеет единственный критический путь, то этот путь проходит через все критические события, т.е. события с нулевыми резервами времени. Если же критических путей несколько, то выявление их с помощью критических событий может быть затруднено, так как через некоторые критические события могут проходить как критические, так и некритические пути. В этом случае для определения критических путей рекомендуется использовать критические работы.
Зная параметры всех событий сетевой модели, можно легко определить параметры работ, которые являются основным элементом структурного деления сетевого графика ТЭП вследствие однозначности и конкретности их целевого предназначения, привлечения для выполнения исполнителей однородной специальности, постоянства рабочего места, используемых средств и объекта, на котором выполняется данная работа (операция).
Отдельная работа может начаться (и окончиться) в ранние, поздние или другие промежуточные сроки. В дальнейшем при оптимизации сетевого графика возможно любое размещение работы в заданном интервале.
Очевидно, что ранний срок t рн (i, j) начала работы (i,j) совпадает с ранним сроком наступления начального (предшествующего) события i, т.е.
t рн(i,j) = t р(i). (2.7)
Тогда ранний срок t ро (i,j) окончания работы (i,j) определяется по формуле
t ро(i,j) = t р(i) + t (i,j). (2.8)
Ни одна работа не может окончиться позже допустимого позднего срока своего конечного события i. Поэтому поздний срок t по(i,j) окончания работы (i,j) определяется соотношением
t по(i,j) = t п(j), (2.9)
а поздний срок t пн (i,j) начала этой работы - соотношением
t пн(i,j) = t п(j) - t (i,j). (2.10)
Таким образом, в рамках сетевой модели моменты начала и окончания работы тесно связаны с соседними событиями ограничениями (2.7) - (2.10).
Прежде чем рассматривать резервы времени работ, обратимся к резерву времени пути. Такие резервы имеют все некритические пути.
Резерв времени пути R (L)определяется как разность между длиной критического и рассматриваемого пути
R (L) = t кр - t (L). (2.11)
Он показывает, на сколько в сумме могут быть увеличены продолжительности всех работ, принадлежащих этому пути. Если затянуть выполнение работ, лежащих на этом пути, на время, большее чем R(L), то критический путь переместится на путь L.
Отсюда можно сделать вывод, что любая из работ пути L на его участке, не совпадающем с критическим путем (замкнутым между двумя событиями критического пути), обладает резервом времени.
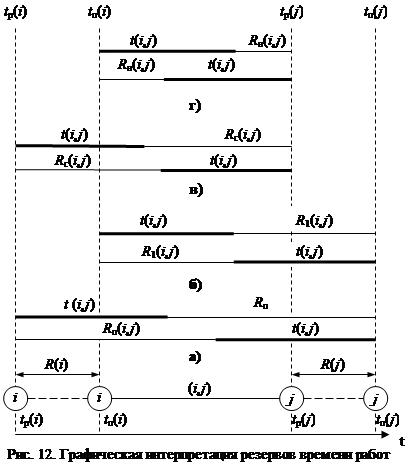
Среди резервов времени работ выделяют четыре разновидности резервов, графическая интерпретация которых представлена на рис. 12.
Полный резерв времени R п(i,j) работы (i,j) (рис. 12 а) показывает, на сколько можно увеличить время выполнения данной работы при условии, что срок выполнения комплекса работ не изменится. Полный резерв R п(i,j) определяется по формуле
R п(i,j) = t п(j) - t р(i) - t (i,j). (2.12)
Полный резерв времени работы равен резерву максимального из путей, проходящих через данную работу. Этим резервом можно располагать при выполнении данной работы, если ее начальное событие свершится в самый ранний срок, и можно допустить свершение конечного события в его самый поздний срок. Важным свойством полного резерва времени работы является то, что он принадлежит не только этой работе, но и всем полным путям, проходящим через нее. При использовании полного резерва времени только для одной работы резервы времени остальных работ, лежащих на максимальном пути, проходящем через нее, будут полностью исчерпаны. Резервы времени работ, лежащих на других (немаксимальных по длительности) путях, проходящих через эту работу, сократятся соответственно на величину использованного резерва.
Остальные резервы времени работы являются частями ее полного резерва.
Частный резерв времени первого вида R1 работы (i,j) (рис.12 б) есть часть полного резерва времени, на которую можно увеличить продолжительность работы, не изменив при этом позднего срока ее начального события. Этим резервом можно располагать при выполнении данной работы в предположении, что ее начальное и конечное события свершаются в свои самые поздние сроки. R1 находится по формуле
R1 (i,j) = t п(j) - t п(i) - t (i,j), (2.13)
R1 (i,j) = R п(i,j) - R (i). (2.14)
Частный резерв времени второго вида, или свободный резерв времени R с работы (i,j) (рис. 12 в) представляет часть полного резерва времени, на которую можно увеличить продолжительность работы, не изменив при этом раннего срока ее конечного события. Этим резервом можно располагать при выполнении данной работы в предположении, что ее начальное и конечное события свершатся в свои самые ранние сроки. R с находится по формуле
R с(i,j) = t р(j) - t р(i) - t (i,j), (2.15)
R с(i,j) = R п(i,j) - R (j). (2.16)
 |
Свободным резервом времени можно пользоваться для предотвращения случайностей, которые могут возникнуть в ходе выполнения работ. Если планировать выполнение работ по ранним срокам их начала и окончания, то всегда будет возможность при необходимости перейти на поздние сроки начала и окончания работ.
Независимый (свободный) резерв времени R н работы (i,j) (рис. 12 г)— часть полного резерва времени, получаемая для случая, когда все предшествующие работы заканчиваются в поздние сроки, а все последующие работы начинаются в ранние сроки
R н(i,j) = t р(j) - t п(i) - t (i,j) (2.17)
или
R н(i,j) = R п(i,j) - R (i). (2.18)
Использование независимого резерва времени не влияет на величину резервов времени других работ. Независимые резервы стремятся использовать тогда, когда окончание предыдущей работы произошло в поздний допустимый срок, а последующие работы хотят выполнить в ранние сроки. Если величина независимого резерва, определяемая по формуле (2.17) или (2.18), равна нулю или положительна, то такая возможность есть. Если же величина R н(i,j) отрицательна, то этой возможности нет, так как предыдущая работа еще не оканчивается, а последующая уже должна начаться. Поэтому отрицательное значение R н(i,j) не имеет реального смысла. А фактически независимый резерв имеют лишь те работы, которые не лежат на максимальных путях, проходящих через их начальные и конечные события.
Следует отметить, что резервы времени работы (i,j), показанные на рис. 12, могут состоять из двух временных отрезков, если интервал продолжительности работы t (i,j) занимает промежуточную позицию между двумя его крайними положениями, изображенными на графиках.
Таким образом, если частный резерв времени первого вида может быть использован на увеличение продолжительности данной и последующих работ без затрат резерва времени предшествующих работ, а свободный резерв времени - на увеличение продолжительности данной и предшествующих работ без нарушения резерва времени последующих работ, то независимый резерв времени может быть использован для увеличения продолжительности только данной работы.
Работы, лежащие на критическом пути, так же, как и критические события, резервов времени не имеют.
Если на критическом пути лежит начальное событие i, то
R п(i,j) = R1 (i,j). (2.19)
Если же на критическом пути лежит конечное событие j, то
R п(i,j) = R с(i,j). (2.20)
Если на критическом пути лежат начальное и конечное события i и j, но сама работа не принадлежит этому пути, то
R п(i,j) = R1 (i,j) = R с(i,j) = R н(i,j). (2.21)
Соотношения (2.19) - (2.21) можно использовать при проверке правильности расчетов резервов времени отдельных работ.
Резервы времени событий, работ и пути относятся к важнейшим параметрам сетевой модели. Однако с их помощью трудно оценить напряженность сроков выполнения работ особенно в тех случаях, когда в сетевом графике имеется несколько работ и путей с одинаковыми полными резервами, так как величина полного резерва времени далеко не всегда может достаточно точно характеризовать, насколько напряженным является выполнение той или иной работы некритического пути. Все зависит от того, на какую последовательность работ распространяется вычисленный резерв и какова продолжительность этой последовательности.
Определить степень трудности выполнения в срок каждой группы работ некритического пути можно с помощью коэффициента напряженности работ.
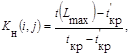
Коэффициентом напряженности К н работы (i,j) называется отношение продолжительности несовпадающих (заключенных между одними и теми же событиями) отрезков пути, одним из которых является путь максимальной продолжительности, проходящий через данную работу, а другим – критический путь:
 (2.22)
(2.22)
где t (L max) – продолжительность максимального пути, проходящего через работу (i,j);
t кp– продолжительность (длина) критического пути;
t’ кp – продолжительность отрезка рассматриваемого пути, совпадающего с критическим путем.
Формулу (2.22) можно легко преобразовать к следующему виду:
 (2.23)
(2.23)
где R п(i,j) – полный резерв времени работы (i,j).
Коэффициент напряженности K н(i,j) может изменяться в пределах от нуля (для работ, у которых отрезки максимального из путей, не совпадающие с критическим путем, состоят из фиктивных работ нулевой продолжительности) до единицы (для работ критического пути). При этом чем ближе коэффициент напряженности K н(i,j) к единице, тем сложнее выполнить данную работу в установленные сроки, и чем ближе к нулю, то тем большим относительным резервом обладает максимальный путь, проходящий через данную работу. Однако следует помнить, что работы могут обладать одинаковыми полными резервами, но степень напряженности сроков их выполнения, выражаемая коэффициентом напряженности K н(i,j), может быть различна. И наоборот, различным полным резервам могут соответствовать одинаковые коэффициенты напряженности. Необходимо обратить внимание и на то, что больший полный резерв одной работы (по сравнению с другой) не обязательно свидетельствует о меньшей степени напряженности ее выполнения. Это объясняется разным удельным весом полных резервов работ в продолжительности отрезков максимальных путей, не совпадающих с критическим путем.
Вычисленные коэффициенты напряженности позволяют дополнительно классифицировать работы по зонам. В зависимости от величины Kн (i,j) выделяют три зоны: критическую (K н(i,j)>0,8); подкритическую (промежуточную) – (0,6< K н(i,j)<0,8); резервную (K н(i,j) < 0,6).
Таким образом, коэффициент напряженности позволяет выявить в сетевом графике работы, которые требуют пристального внимания (работы критического и подкритического путей) и которые имеют значительные резервы времени, а, следовательно, могут быть выполнены меньшими ресурсами, или их выполнение может быть отсрочено в пределах имеющего резерва времени. В процессе оптимизации сетевой модели ТЭП перераспределение ресурсов, как правило, должно идти в одном направлении: из зон, менее напряженных, к зонам, наиболее напряженным. Дополнительные ресурсы также должны в первую очередь направляться в зоны, объединяющие наиболее напряженные работы, с тем, чтобы добиться сокращения их продолжительности. При этом чем меньше будут критическая и резервная зоны, тем лучше составлен сетевой график ТЭП.
До сих пор мы говорили лишь о параметрах сетевых моделей с детерминированными временными характеристиками. Однако на практике часто встречаются технологические эксплуатационные процессы, в которых продолжительность работы является случайной величиной, характеризующейся своим законом распределения, а значит и своими числовыми характеристиками. Расчет и оптимизация таких процессов осуществляется при помощи вероятностных сетевых моделей и называется сетевым планированием в условиях неопределенности. Рассмотрим параметры вероятностной сетевой модели и методы их расчета.

