 2015-07-14
2015-07-14 892
892
2. Для обертальних електродвигунів залежність кутової швидкості електро- двигуна від його обертового моменту називають механічною характеристикою електродвигуна:,)M (f = w де ω – кутова швидкість електродвигуна, 1/с; М – електромагнітний обертовий момент, який розвиває електродвигун, Н·м. Механічні характеристики можуть бути природними і штучними. Приро- дною механічною характеристикою електродвигуна називають залежність швидкості обертання двигуна від створюваного ним моменту при номінальних параметрах живильної мережі (номінальних значеннях напруги і частоти), но- мінальному магнітному потоці і при відсутності додаткових опорів у колі якоря (ротора, статора). Якщо природна механічна характеристика не задовольняє тих або інших вимог виробничого механізму, використовують штучні механічні характерис- тики. Вони також являють собою залежність кутової швидкості двигуна від йо- го моменту, але при неномінальних параметрах. Крім механічної характеристики, в теорії електропривода є поняття елек- тромеханічної характеристики. Електромеханічною характеристикою елект- родвигуна називають залежність його кутової швидкості від струму якоря.)І(f = w Електродвигуни можуть працювати в режимі двигуна, приводячи в рух робочі машини, та в гальмівних режимах. Майже всі електродвигуни характе- ризуються тим, що у режимі двигуна при збільшенні обертального моменту ку- това швидкість зменшується, а в гальмівних – при збільшенні швидкості галь- мівний момент зростає. Величина зміни швидкості при зміні моменту різних двигунів неоднакова і залежить від коефіцієнта жорсткості β механічної характеристики. Жорсткістю механічної характеристики електродвигуна є відношення:13 2 1 2 1 w w w b - - = D D = M M M, (1.19) тобто відношення різниці електромагнітних моментів двигуна у будь-яких су- сідніх точках характеристики до відповідної різниці швидкостей електродвигу- на у тих же точках. Якщо механічна характеристика електродвигуна нелінійна, її ступінь жо- рсткості не залишається постійним і визначається у цьому випадку згідно (1.19) в кожній точці характеристики, як похідна моменту від кутової швидкості: w b d. (1.20)=dM На рисунку 1.8 показані природні характеристики найбільш поширених електродвигунів обертального руху: 1 - двигуна постійного струму незалежного збудження; 2 - двигуна постійного струму послідовного збудження; 3 - асинхронного двигуна; 4 - синхронного двигуна. Рисунок 1.8 – Механічні характеристики електродвигунів Жорсткою (рисунок 1.8, пряма 1), називають механічну характеристику, при якій із зміною обертального моменту в широких межах кутова швидкість двигуна змінюється дуже мало. Таку характеристику мають електродвигуни постійного струму незалежного (паралельного) збудження та асинхронні дви- гуни, що працюють при ковзаннях, менших від критичного (рисунок 1.8, крива 3). Абсолютно жорсткою (рисунок 1.8, пряма 4), β = ∞, називають механічну характеристику, при якій із зміною обертального моменту швидкість двигуна не змінюється. Таку характеристику мають синхронні двигуни. М'якою (рисунок 1.8, крива 2) називають механічну характеристику, де невелика зміна обертального моменту викликає значну зміну швидкості двигу- на (електродвигуни постійного струму послідовного збудження).14 Абсолютно м'якою (рисунок 1.8, пряма 5) називають механічну характе- ристику, коли момент двигуна при зміні швидкості залишається сталим (β = 0). Таку характеристику мають електродвигуни постійного струму незалежного збудження при живленні їх від джерела струму або при роботі в замкнених сис- темах ЕП в режимі стабілізації струму якоря. Жорсткі і м'які механічні характеристики мають від'ємний коефіцієнт жо- рсткості, тобто β < 0. На неробочій частині характеристики асинхронного дви- гуна при ковзаннях, більших від критичного, коефіцієнт β > 0
4 Автоматический пуск аварийного дизель-генератора, включение нагрузки
После обесточивания судна автоматическая СУ АДГ по определенной программе обеспечивает:
отключение фидеров питания щита аварийной СЭС от ГРЩ;
прокачивание масла в смазочной системе дизеля и перемещение рейки регулирования подачи топлива в положение минимальной подачи;
включение стартера, вращающего дизель;
исключение повторного включения стартера при удавшемся пуске и обеспечение еще двух включений стартера в случае неудавшегося пуска;
при удавшемся пуске перемещение рейки регулирования подачи топлива в положение номинальной подачи;
подключение генератора на сборные шины после его возбуждения с одновременным приемом нагрузки ранее включенных приемников или прием нагрузки в 2 ступени;
возвращение системы автоматического пуска АДГ в исходное состояние;
прерывание программы пуска и возврат СУ в исходное состояние в случае включения питания основной СЭС.
Программа пуска может быть реализована с помощью электромеханических контактных устройств или электронной схемы. В 1-м случае при аварии основной СЭС включается ЭД программного устройства, который через замедляющий редуктор вращает кулачковый валик. Последний, в определенной последовательности, с заданными промежутками времени переключает контакты, которые, в свою очередь, управляют реле и другими устройствами, обеспечивающими пуск АДГ и включение нагрузки. Во 2-м случае с помощью электронной схемы реализуется программа управления контактной частью схемы пуска АДГ и включения нагрузки.
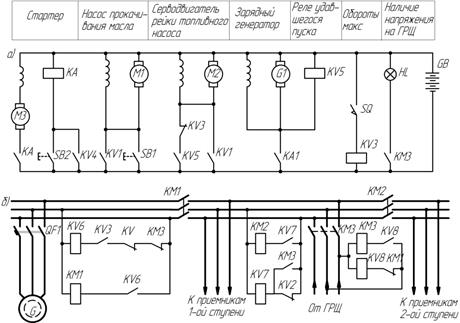 |
| Рисунок 18.1 – Принципиальная схема пуска АДГ (а) и включения нагрузки (б) |
В неаварийном режиме напряжение с шин ГРЩ подается на реле KV8, включаются контакторы КМ2, КМЗ и промежуточное реле KV7. Приемники 1-й и 2-й ступеней включаются на напряжение ГРЩ. Автоматический выключатель QF1 включен, но аварийный генератор отключен от шин щита контактором КМ1.
При аварийном состоянии основной СЭС отключаются контакторы КМЗ и КМ2, начинает работать схема программного управления автоматическим пуском АДГ, до момента включения аварийного генератора G судно остается обесточенным. На 3 с включается реле KV1, его контакты подают питание на двигатели прокачивания масла Ml и подачи топлива М2, причем М2 передвигает рейку подачи топлива в положение минимальной подачи. Далее через VT19 подается питание на реле КV4 пуска, его контакты замыкаются в цепи реле КА. Напряжение батареи GB подается на стартер МЗ, и начинается проворачивание дизеля.
Если пуск удался, то с увеличением частоты вращения АДГ возбуждается маломощный вспомогательный генератор G1, навешенный на дизель, и включается реле KV5 удавшегося пуска. Через его контакты вновь подается питание на двигатель М2, и он передвигает рейку в положение номинальной подачи топлива, после чего замыкается конечный выключатель SQ. Включается промежуточное реле KV3. Его размыкающий контакт отключает двигатель регулирования подачи топлива, а замыкающий контакт через промежуточное реле KV6 обеспечивает подачу питания на контактор КМ1, в результате приемники 1-й ступени подключаются на напряжение аварийного генератора G. В конце цикла работы схемы программного управления закрывается транзистор VT7, выключается реле KV2, включаются реле KV7 и контактор КМ2, коммутирующий приемники 2-й ступени на шины щита аварийной СЭС.
Если АДГ не пускается, то включается тревожная сигнализация. Ручной пуск АДГ осуществляется с помощью кнопок SB1 и SB2.








