 2015-08-13
2015-08-13 995
995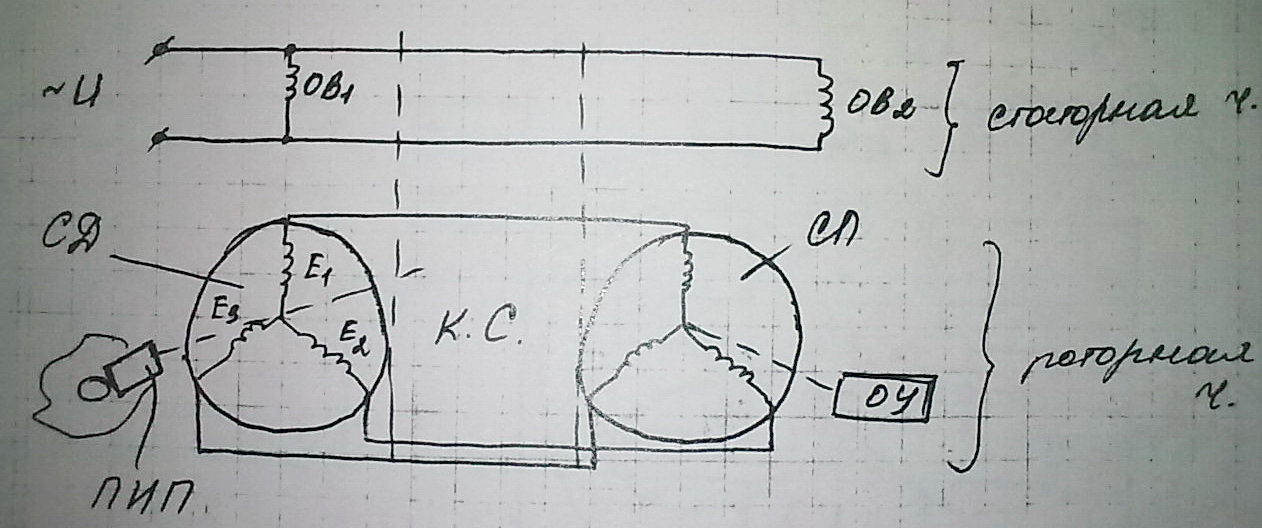
ОУ – отсчетное устройство.
Предназначена для передачи информации об угловых перемещениях. Используется в приборах: рефракторы, спектрографы.
Схема предст. собой емкостные машины переменного тока с преобразованием углового перемещения в изменение индуктивной связи м/ду абсолютными возбуждением и синхронизацией.
Синхраниз. момент: М=Ммах*sinα
ПИП содержит чувствительный элемент, кинематически связанный с ротором сельсина (наз. сельсин-датчик (СД)).
Приемником информации аналог. машина, ротор которой связан с отсчетным устройством, и наз-ся сельсин-приемник.
Обмотки возбуждения Ов1 и Ов2 подключены к источнику переменного напряжения, а 3-х фазные обмотки в роторах машин наз-ся обмотками синх-ции с связаны м/ду собой каналом связи (КС)(линия может достичь несколько сотен метров).
При протекании переменного тока по обмотке возбуждения в обмотках Е1, Е2, Е3 формируется ЭДС, соответствующая 3-х фазному расположению этих обмоток. Е1=Ем*соsα Е2=Ем*соs(α-1200)
Е3=Ем*соs(α+1200)
α – возможное изменение положения обмотки синхронизации относительно магнитного поля обмотки возбуждения.
Если оба ротора нах-ся в согласованном положении, ЭДС обмоток синхронизации равны м/ду собой и в каналах связи отсутствуют уравнивающие токи.
При изменении положения ротора СД ЭДС отличаются и в каналах связи текут токи пропорциональные разности ЭДС соответствующих фаз СД и СП. Эти токи взаимодействуют в СП с магнитным потоком Ов2, вызывая появление синхронных моментов СП. В результате ротор СП поворачивается до тех пор, пока не сравняется ЭДС СД и СП. После чего исчезают токи, следовательно ротор перестает вращаться. Угол поворота СД=углу поворота СП.
Абсолютная погрешность датчиков:
СД – 0,25-0,5 угловых единиц; СП – 0,75-1,5 угловых единиц.








