 2015-10-16
2015-10-16 1204
12041. Визначити на терезах масу тіл (mт) і розмістити їх на платформі.
2. Визначити період коливань платформи з тілами.
Результати вимірювань занести в табл. 2.
3. За формулою
J(пл.+ т) = 
визначити момент інерції платформи з тілами.
Таблиця 2
| № до- сліду | n | t, с | T, с |  T, с T, с | J(пл+т) кг м  | Jт, кг м |  , % , % |
| Сер. |
4. Оскільки момент інерції адитивна величина, то момент інерції платформи з тілами J(пл+т) дорівнює сумі моменту інерції платформи Jпл.
та моменту інерції тіл Jт, тобто J(пл.+ т) = Jпл.+Jт і тоді.
Jт =J(пл.+ т) Jпл..
Кінцеві результати записати у вигляді
Jпл. =...; J(пл.+ т) =...;
Jпл. теор. =...; Jт =....
5. Зробити висновок.
Контрольні питання
наведені в лабораторній роботі № 1.
Лабораторна робота № 4
ВИЗНАЧЕННЯ МОМЕНТУ ІНЕРЦІЇ ТІЛА
ЗА ДОПОМОГОЮ МАЯТНИКА МАКСВЕЛЛА
Мета роботи експериментально визначити момент інерції тіла.
Прилади та обладнання: маятник Максвелла, металеві кільця.
Теоретичні відомості
наведені в лабораторній роботі № 1.
Опис установки та методу вимірювання
Маятник лабораторного приладу це ролик, закріплений на осі і підвішений за біфілярним способом. На ролик накладають змінні кільця, змінюючи таким чином момент інерції системи. У верхньому положенні маятник утримується електромагнітом. Час падіння маятника фіксується за допомогою фотоелектричних датчиків.
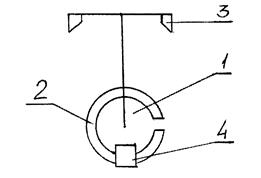 Рисунок 1 Рисунок 1 | 1 ролик; 2 накладне кільце; 3 електромагніт; 4 фотоелектричний датчик. |
Для руху, який здійснюється маятником Максвелла, закон збереження механічної енергії записується у вигляді
mgh =  +
+  .
.
Можна показати, що момент інерції маятника
J =  md (
md ( 1), (1)
1), (1)
де m маса маятника;
m = mо + mp + mк; (2)
mо, mp, mк маси відповідно осі маятника, ролика та накладного кільця;
d зовнішній діаметр осі маятника разом із ниткою підвісу;
t час падіння маятника;
h довжина маятника, яка дорівнює висоті підйому;
d = dо + 2dn; (3)
dо і dn діаметри осі маятника і нитки підвісу.
Порядок виконання роботи
1. Записати значення діаметрів (осі маятника dо; ролика dр; накладного кільця dк; нитки підвісу dn) та маси осі, ролика, кілець (значення мас окремих елементів нанесені на них).
2. Ввімкнути прилад в мережу, натиснути клавішу "СЕТЬ". Перевірити, чи всі індикатори висвічують цифру "0" та чи світяться лампочки фотоелектричних датчиків.
3. На ролик маятника надіти кільце, притискаючи його до упору.
4. На вісь маятника намотати нитки підвісу та зафіксувати маятник за допомогою електромагніту.
5. Натиснути клавішу "ПУСК".
6. Виміряне значення часу падіння t записати в таблицю.
Таблиця
dо =10 мм; dр= 86 мм; dк =105 мм; dn =0,5 мм
| Вимі- ри | t, с | m, кг | h, м | Jк, кг м | Jк(т), кг м | , % |
| 1е | кільце | |||||
| Сер. | ||||||
| 2е | кільце | |||||
| Сер. | ||||||
| 3є | кільце | |||||
| Сер. |
7. Натиснути клавішу "СБРОС" та повторити дослід 5 разів.
8. Визначити середнє значення часу падіння за формулою
tсер. =  ,
,
де n кількість вимірів;
tі час падіння при іму вимірі.
9. За шкалою на вертикальній колонці приладу визначити довжину маятника h.
10. За формулою (3) визначити діаметр осі маятника разом із ниткою.
11. За формулою (2) визначити масу маятника разом із кільцем.
12. За формулою (1) визначити момент інерції маятника J.
13. Визначити момент інерції кільця: Jк = J J', де J' сума моментів інерції осі та ролика, J' = 6 10  кг м .
кг м .
14. Провести дослід ще для двох кілець і записати одержані результати в таблицю.
15. Знайти теоретичне значення моментів інерції кілець за формулою
Jк. теор. =  mк (dк + dр ).
mк (dк + dр ).
16. Обчислити відносну похибку визначення моментів інерції кілець:
=  100%.
100%.
Контрольні питання
наведені в лабораторній роботі № 1.
Лабораторна робота № 132
ВИВЧЕННЯ ЗАКОНІВ ДИНАМІКИ ОБЕРТАЛЬНОГО РУХУ
ЗА ДОПОМОГОЮ МАЯТНИКА ОБЕРБЕКА
Мета роботи експериментально визначити момент інерції тіла, момент сили та кутове прискорення; визначити залежність моменту інерції тіла від розподілу його маси відносно осі обертання.
Прилади та обладнання: маятник Обербека, тягарці, лінійка, штангенциркуль, секундомір.
Теоретичні відомості
Обертальний рух характеризується моментами сили, інерції, імпульсу.
Векторний добуток радіусавектора  (рис.1), проведеного з точки О в точку прикладання сили
(рис.1), проведеного з точки О в точку прикладання сили  , на цю силу називають моментом сили М відносно точки О:
, на цю силу називають моментом сили М відносно точки О:
 =
= 

 .
.
Вектори , і утворюють праву трійку. Числове значення моменту сили: М = r F sin = F  ,
,
де кут між векторами і , плече сили = r sin.
Моментом імпульсу мате-ріальної точки масою m, яка рухається з швидкістю v від-носно деякої точки О, назива-ють величину  = m = m  , або = , або =  , де радіусвектор матеріальної точки, = m її імпульс. L = r m v sin, = (, ). , де радіусвектор матеріальної точки, = m її імпульс. L = r m v sin, = (, ). | 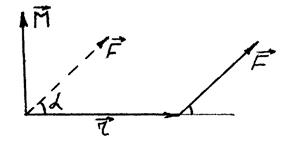 Рисунок 1 Рисунок 1 |
Момент інерції Ji матеріальної точки відносно осі це скалярна величина, яка чисельно дорівнює добутку маси матеріальної точки на квадрат її відстані rі до осі
Ji = mi ri . (1)
Cуму моментів інерції всіх матеріальних точок тіла відносно осі називають моментом інерції твердого тіла відносно осі
J =  Ji J =
Ji J =  mi ri (2)
mi ri (2)
Рівняння руху тіла, що обертається навколо нерухомої точки, має вигляд  = . (3)
= . (3)
Це рівняння називають основним законом динаміки обертального руху тіла, закріпленого в одній нерухомій точці:
Швидкість зміни моменту імпульсу тіла, що обертається навколо нерухомої точки, дорівнює результуючому моментові відносно цієї точки всіх зовнішніх сил, прикладених до тіла.
Якщо тіло закріплене у двох нерухомих точках, то рівняння обертального руху тіла відносно осі z, яка проходить через ці точки,
 , (4)
, (4)
де L момент імпульсу відносно осі; М момент зовнішніх сил відносно цієї осі.
Рівняння (4) виражає основний закон динаміки для тіла, що обертається навколо нерухомої осі: швидкість зміни моменту імпульсу тіла відносно нерухомої осі обертання дорівнює результуючому моментові відносно цієї осі всіх зовнішніх сил, що діють на тіло.
Ураховуючи, що для абсолютно твердого J = соnst і
= J  , одержимо
, одержимо  = , або J
= , або J  = ,
= ,
де J момент інерції твердого тіла відносно деякої осі; кутове прискорення; момент зовнішніх сил відносно тієї ж осі.
Формули, які описують обертальний рух тіла, легко запам'ятовуються за аналогією до формул поступального руху.
| Поступальний рух | Обертальний рух | ||
| Лінійне переміщення | | Кутове переміщення |  |
| Лінійна швидкість |  | Кутова швидкість |  |
| Лінійне прискорення |  | Кутове прискорення |  |
| Cила | | Момент сили | |
| Імпульс | = m | Момент імпульсу | = J |
| Маса | m  ; ;  ; ;  | Момент інерції | J  ; ;  ; ;  |
| Кінетична енергія | Wк = | Кінетична енергія | Wк =  |
Опис приладу та методу вимірювання
Залежність кутового прискорення від зміни моменту інерції системи вивчають за допомогою хрестоподібного маятника Обербека (рис.2). Він складається з вала, на якому запресовано шків радіусом R і чотирьох
| стрижнів у вигляді хрестовини.По стрижнях із поділками вільно переміщуються тіла, положення яких на стрижнях фіксується гвинтами. Маятник приводиться в обертання навколо горизонтальної осі за допомогою тягарця масою m, який за допомогою нитки прикріплюють до шківа. Важок опускається з прискоренням і приводить в обертальний рух маятник. |  Рисунок 2 Рисунок 2 |
Рівняння руху тягарця за другим законом Ньютона:
ma = mg Fн,
де Fн сила натягу нитки, Fн = m(g a).
Обертальний момент сили відносно осі обертаннРисунок 2я утворюється силою натягу нитки Fн (силою тертя нехтуємо):
M = Fн R = mR(g a),
де R радіус шківа.
Прискорення а можна визначити, якщо відомий час t, протягом якого вантаж опускається на відстань h:
а =  .
.
Тоді обертальний момент, що діє на саму систему, визначається рівністю:
M = mR (g ). (5)
Кутове прискорення а пов'язане з лінійним співвідношенням:
а = R або =  . (6)
. (6)
Момент інерції системи обчислюється за формулою J =  ,
,
або J = mR  . (7)
. (7)
Такий метод визначення моменту інерції називається динамічним.
Порядок виконання роботи








