 2015-10-13
2015-10-13 749
749Чтобы управлять процессами и агрегатами в промышленности и на транспорте, необходимо контролировать их состояние. С этой целью применяют автоконтроль — автоматическое измерение состояния объекта управления, а также обработка этой информации и выявление событий, требующих введения управляющих воздействий в объект. К таким событиям относятся, например, выход температуры электрической печи за установленные пределы, аварийный режим установки и т. д. Первичным элементом систем автоконтроля являются датчики (чувствительные элементы) — устройства, преобразующие контролируемую величину в другую, более удобную для измерения или обработки. В настоящее время наиболее распространены системы, обрабатывающие и преобразующие информацию в виде электрических сигналов. Поэтому рассмотрим датчики, преобразующие величины х различной физической природы, характеризующие состояние объекта, в электрические величины у (напряжение, ток, импеданс) (рис. 2-1,а).
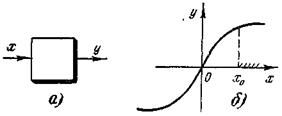
Рис 2-1. Датчик как преобразователь (а) и его возможная статическая характеристика (б)
По типу входной величины х чувствительные элементы делятся на датчики механических, тепловых, оптических и других величин. По типу выходной величины у они делятся на параметрические (у=R, L, С) и генераторные (у=U, I). Параметрические датчики требуют источник питания, в то время как генераторные сами вырабатывают электрическую энергию.
Основной характеристикой датчика является его чувствительность, которая определяется по его статической характеристике, если эта характеристика нечетна и проходит через начало координат (рис. 2-1,6), как  статическая чувствительность, либо как
статическая чувствительность, либо как  — динамическая чувствительность. При выборе датчика необходимо, чтобы в рабочем диапазоне изменения х величина S Д была отлична от нуля. Так, датчик с характеристикой типа насыщения (рис. 2-1,б) не годится для измерения величин х>х 0, где S Д=0.
— динамическая чувствительность. При выборе датчика необходимо, чтобы в рабочем диапазоне изменения х величина S Д была отлична от нуля. Так, датчик с характеристикой типа насыщения (рис. 2-1,б) не годится для измерения величин х>х 0, где S Д=0.
Другие характеристики датчика:1) величина сигнала на выходе при нулевом входе, которая характеризует шумы датчика и помехи (наводки);
2) разрешающая способность, которая равна наименьшему изменению х, приводящему к изменению у (для датчиков, дающих квантованный по уровню сигнал у);
3) мощность, момент или усилие, отбираемые от измеряемой величины.
Лучший датчик тот, у которого величины п. 1, 2, 3 минимальны.
При конструировании и расчете систем управления необходимо учитывать также динамические характеристики датчиков (инерционность, запаздывание). В большинстве случаев стремятся работать с безынерционными датчиками, однако в некоторых случаях динамические характеристики датчиков используют для получения определенных свойств) системы: фильтрация помех инерционными датчиками, получение сигналов, пропорциональных скорости изменения величины х (в скоростных термопарах и тахогенераторах) и т. д. Рассмотрим наиболее широко применяемые в автоматике датчики.








