 2015-10-14
2015-10-14 1177
1177Типы объёмных гидравлических приводов (ГП).
Если в ГП имеется возможность изменять только направление движения выходного звена, то он называется нерегулируемым. Если в ГП имеется возможность скорость движения выходного звена, как по величине, так и по направлению, то такой ГП называется регулируемым.
Большинство современных г/приводов являются регулируемыми, т.к позволяют изменять скорость движения выходного звена.
К регулируемым объёмным ГП можно отнести:
- ГП, в которых имеется возможность непосредственного управления скоростью выходного звена;
- ГП со стабилизацией скорости выходного звена;
- ГП, в которых обеспечивается синхронное движение выходных звеньев нескольких г/машин;
- следящие ГП.
Изменение скорости движения выходного звена может быть обеспечено разными способами.
Г/приводы с дроссельным регулированием.
Дроссельный способ регулирования скорости движения выходного звена применяют в ГП, где установлены нерегулируемые г/машины. Изменение скорости возможно за счет изменения расхода РЖ, поступающей в г/двигатель, часть РЖ отводится в бак минуя г/двигатель. В зависимости от места его установки (снижает давление в потоке РЖ) по отношению к г/двигателю различают ГП с параллельным и последовательным включением г/дросселя.
а) ГП с дроссельным регулированием скорости выходного звена при параллельном включении г/дросселя.
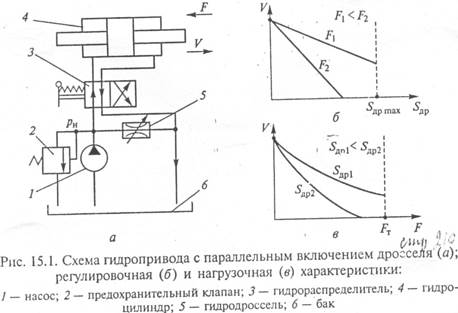
Регулирование скорости выходного звена (штока г/цилиндра 4) обеспечивается за счет
________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
Основной недостаток: __________________________________________________________
________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
При расходе РЖ через г/дроссель 5 (Qдр) расход РЖ, поступающей в г/цилиндр, можно рассчитать по формуле:
Qгц = Qн — Qдр 1
Где: Qн — подача насоса.
Расход Qдр при коэффициенте расхода µ: _______
Qдр = µ·Sдр·√2∆Рдр /ρ 2
т.к ∆Рдр = ∆Ргц, его можно найти из формулы F = ∆P∙S∙ηм:
∆Рдр = ∆Ргц = F /Sп, следовательно, скорость движения штока г/цилиндра можно рассчитать по формуле: ______
υ = Qгц / Sп = 1 /Sп·[Qн - µ·Sдр·√2F /ρ·Sп 3
Из 3 видно, что скорости движения выходного звена в таком ГП будет меняться за счет изменения площади проходного сечения (Sдр) регулируемого г/дросселя 5, включенного параллельно г/двигателю.
Регулировочная характеристика, представляющая собой ___________________________
________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
Графическая зависимость υ = f(F) получила название ________________________________
________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
б ) ГП с дроссельным регулированием скорости выходного звена при последовательном включении г/дросселя.
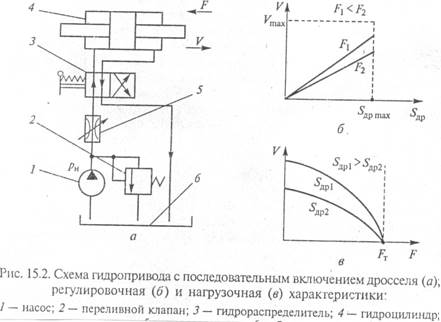
Т.к г/дроссель и г/цилиндр включены последовательно, то расход РЖ, поступающей в г/цилиндр, расходу РЖ, проходящей через регулируемый г/дроссель.
_______
Qгц = Qдр = µ·Sдр·√2∆Рдр /ρ 4
С учетом допущений ∆Рдр = Рн - ∆Ргц = Рн - F /Sп
В данном ГП давление на выходе насоса поддерживается постоянным при помощи переливного клапана. Тогда скорость поршня можно определить по формуле:
___________
υ = Qгц / Sп = µ·Sдр /Sп ·√2 /ρ·(Рн - F /Sп) 5
Из 5 видно, что скорость движения поршня г/цилиндра также является функцией двух переменных: υ = f(Sдр) и υ = f(F)
Основной недостаток тот же: _________________________________________________
________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________
Поэтому в ГП, работающих в знакопеременных нагрузках, рекомендуется устанавливать
________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________________








