 2015-10-22
2015-10-22 659
659| Аi | Микрокоманды |
| А1 | Установка нулевого состояния всех счетчиков |
| А2 | Запись в стек исходной информации |
| А3 | Считывание в ПЗУ i -гo входа, подлежащего коммутации |
| А4 | «+1» к Сч. ст. |
| А5 | Запись в РгУ i -й строки матрицы ||А|| |
| А6 | Опрос декодера ДСЗ |
| А7 | «+1» к 2 Сч. |
| А8 | Опрос декодера ДС4 |
| А9 | Опрос декодера ДС6 |
| А10 | Замыкание ЭК в коммутаторе I звена |
| А11 | «+1» к 1 Сч. |
| А12 | Опрос декодера ДС1 |
| А13 | Опрос декодера ДС5 |
| А14 | Опрос декодера ДС2 |
| А15 | Замыкание ЭК в коммутаторах II и III звена |
| А16 | Индикация о невозможности установления соединения |
Проверяется содержимое 2 Сч.
| |
Проверяется содержимое 1 Сч.
| |
Проверяется содержимое Сч. ст.
|
В регистр управления РгУ по заданному адресу считывается из ПЗУ i- я строка матрицы требований на соединение ||А||. Регистр управления разделен на части – поля. Каждое поле содержит: П1 – код коммутатора третьего звена; П2 – код выхода; ПЗ – код коммутатора первого звена; П4 – код входа.
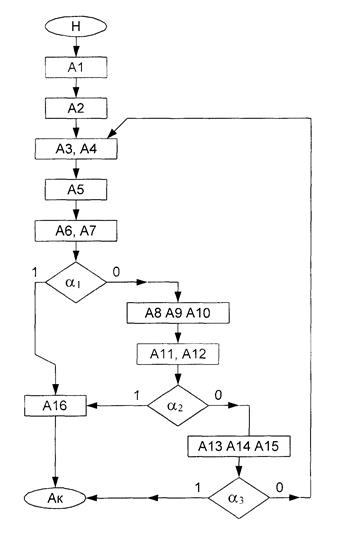
Рис. 110. Алгоритм управления многокаскадным коммутатором
Управляющая подсистема – микропрограммный автомат для управления блоками И, Л, Ф, А по реализации алгоритма установления соединений.
В табл. 49 приведен список микрокоманд и логических условий. Очевидно, что в этой классификации указаны основные функции пяти подсистем. Для логической подсистемы требуется введение еще ряда дополнительных логических условий, таких как: весь ли список на соединение исчерпан, заняты ли промежуточные линии в коммутационном поле и др. Предложенная система управления коммутатором многофункциональна, т.к. позволяет осуществить управление трехкаскадными схемами, как с ординарной, так и с неординарной коммутацией. Алгоритм управления операционным устройством многозвенного коммутатора в форме ЛСА имеет вид:
А0А1А2  [А3А4]А5[А6А7]
[А3А4]А5[А6А7]  1[А8А9А10][А11А12]
1[А8А9А10][А11А12]  [А13А14А15]
[А13А14А15] 
 Ак; (
Ак; ( v
v  )
)  .
.
При переходе к неординарной коммутации изменяются адресные поля в РгУ и увеличивается количество счетчиков, регистров и декодеров, определяющих 2ПЛ. Сам алгоритм управления (110) практически не изменяется. Быстродействие установления соединений за счет использования специальной операционной структуры (рис. 108) и автомата Мура, соответствующего алгоритму управления (110) почти на два порядка выше, чем при программной реализации на микроконтроллере на одной и той же элементной базе.
Реализация системы управления на быстродействующей логике, например ЭСЛ, позволит строить многозвенные коммутаторы СВЧ диапазона на базе арсенид-галлиевого матричного кристалла (БМК). БМК может использоваться как однозвенный коммутатор размерностью 4x4 [14]. На основе нескольких БМК по трехкаскадной схеме может быть построен многовходовый коммутатор, как для ординарной, так и для неординарной коммутации. Это может быть принципиально новым решением для СВЧ диапазона, устраняющим необходимость последовательной обработки списков через буфер с одним коммутатором 4x4 или с помощью коммутационных схем на основе числовых матриц ПЗУ. Аналогично может быть решен вопрос многозвенной коммутации в пневмоавтоматике на базе схем [24].
Таким образом, структурная реализация системы управления коммутаторами по декомпозиционной схеме в виде специального (Ф, И, А, Л) операционного устройства и автомата управления им позволяет достичь нового качества в задачах пространственной коммутации сигналов.
Основная литература
1. Постников А.И. Основы теории цифровых автоматов. – Красноярск: КрГТУ, 1999. – 251 с.
2. Сапожников В.В., Кравцов Ю.А., Сапожников Вл.В. Теория дискретных устройств ж.-д.автоматики, телемеханики и связи. – М.: Транспорт, 2001. – 307 с.
Дополнительная литература
1. Амосов В.В. Схемотехника и средства проектирования цифровых устройств. – СПб.: БХВ – Петербург, 2007. – 242 с.
2. Баранов С.И., Скляров В.А., Янцен Н.Я. Синтез автоматов на элементах с матричной структурой / Проектирование функционально ориентированных вычислительных систем. – Л.:ЛГУ, 1990. – С. 90–108.
3. Балакин В.Н., Барашенков В.В. Проектирование самопроверяемых управляющих устройств по тестопригодным схемам алгоритмов // Автоматика и телемеханика. – 1988. – №11. – С. 161–168.
4. Баркалов А.А. Синтез устройств управления на ПЛМ. – Донецк: Дон. НТУ, 2002. – 128 с.
5. Бабкин П.А., Мухопад Ю.Ф. Синтез МПА с ассоциативной памятью // МПС контроля и управления: тр. Сиб. науч. техн. конф. – Новосибирск НЭТИ, Томск ТИАСУР, 1992. – С. 41–48.
6. Бибило П.Н. Синтез логических схем с использованием языка VHDL. – М.: Солон – Р, 2002.
7. Горбатов В.А., Горбатов А.В., Горбатова М.В. Дискретная математика. – М.: АСТ Астрель, 2006. – 447 с.
8. Горбатов В.А., Смирнов В.И., Хлытчиев И.С. Логическое управление распределенными системами. – М.: Энергоатомиздат, 1991. – 278 с.
9. Глушков В.М. Автоматно-алгебраические аспекты оптимизации МПА // тр. Межд. мат. конгр. – М.: 1968. – С. 53–55.
10. Закревский А.Д. Логика распознавания. – М.: УРСС, 2003. – 140 с.
11. Закревский А.Д. Синтез каскадных схем. – М.: Наука, 1981. – 386 с.
12. Захаров В.Н., Поспелов Д.А., Хазацкий В.Е. Системы управления. – М.: Энергия, 1972. – 344 с.
13. Карпов Ю.Г. Теория автоматов. – СПб.: Питер, 2003. – 208 с.
14. Мелихов С.В., Ненахов А.В., Колесов И.А. и др. Микропроцессорные аналого-цифровые устройства СВЧ на основе базового матричного кристалла // тр. науч.-практ. конф. – Томск: ТУСУР, 2007. – С. 70–74.
15. Мухопад Ю.Ф. Преобразование операторных схем алгоритмов // Информ. системы контроля и управления. – Иркутск: ИрГУПС, 2006. – Вып 14. – С. 118–123.
16. Мухопад Ю.Ф. Проектирование специализированных микропроцессорных вычислителей. – Новосибирск: Наука, 1981. – 183 с.
17. Мухопад Ю.Ф., Мухопад А.Ю. Комбинаторно-нейронные сети // Информ. технологии контроля и управления на транспорте. – Иркутск: ИрИИТ, 2000. – Вып. 8. – С. 54–62.
18. Музылева И. Элементарная база для построения цифровых систем управления. – М.: Техносфера, 2006. – 173 с.
19. Мухопад Ю.Ф., Чекмерев Ю.Д. ПЗУ с самоконтролем. – А.с. №1410101 СССр, БИ №26, 1988.
20. Мухопад Ю.Ф., Бадмаева Т.С., Кругликов С.В. Устройство определения координат изображения. – А.с. № 991452 СССР, БИ №3, 1983.
21. Мухопад Ю.Ф., Мухопад А.Ю., Бадмаева Т.С. Самоконтролируемый автомат управления. – Патент № 63588, опубл. 27.05.2007, БИ №15.
22. Мухопад Ю.Ф., Березков Л.О., Скосырский Г.С., Минаев В.И. Микропроцессорные системы контроля ПЗУ. – Иркутск, Улан-Удэ, ИГУ, 1984. – 144 с.
23. Мухопад Ю.Ф. Микроэлектронные информационно-управляющие ситемы. – Иркутск: ИрГУПС, 2004. – 404 с.
24. Мухопад Ю.Ф., Бовкун А.Ф., Комков А.З. Программная матрица для пневматических систем управления дискретного действия. – Пат. № 62717 РФ, БИ № 12, 27.04.2007; пат. № 63307 РФ, БИ №19, 10.07.2007.
25. Мухопад Ю.Ф., Скосырский Г.С., Репнин В.М. и др. Формирователь временных последовательностей. – А.с. № 991587 СССР, БИ №3, 1983.
26. Мухопад Ю.Ф. Накопитель для радиочастотного ПЗУ // Микропроцессорные системы контроля и управления на транспорте. – Иркутск: ИрИИТ, 2000. – Вып. 6. – С. 129–135. – А.с. № 1410101 СССР, 1988, БИ № 26.
27. Мухопад Ю.Ф., Гардер В.М. Устройство для вычисления функций. – А.с. 696472 СССР, БИ № 41, 1979; А.с. 579622 СССР, БИ № 46, 1979.
28. Мухопад Ю.Ф., Кучина Е.М. Адаптивный аналого-цифровой фильтр. – А.с. 714408 СССР, БИ №5, 1980.
29. Мухопад Ю.Ф., Рудковский В.П. Комбинационный преобразователь информации систем обработки сигналов // Информ. системы контроля и управления в промышленности. – Иркутск: ИрГУПС, 2005. – Вып. 13. – С 3–9.
30. Мухопад А.Ю., Мухопад Ю.Ф. Микропрограммный автомат №82888, БИ №13, 2009. Патент РФ на полезную модель.
31. Мухопад Ю.Ф., Рудковский В.П. Структурный синтез самодиагностируемых обратимых ФПИ // Инф. сист. контроля и управл. в промышл. и на транспорте. – Иркутск: ИрГУПС, 2005. – Вып. 13. – С. 45–49.
32. Мухопад Ю.Ф., Бадмаева Т.С. Синтез автоматов по декомпозиционной схеме алгоритма // Информационные системы контроля и управления. – Иркутск: ИрИИТ, 2002. – С. 14–25.
33. Мухопад А.Ю., Мухопад Ю.Ф. Метод синтез сложных автоматов. – Новосибирск: Научный вестник НГТУ, 2009. – №1 (34). – С. 221–227.
34. Плотников А.В., Баркатов А.А., Стародубцев К.Е. Микропрограммное устройство управления // УС И М, 1987. – №4. – С. 38–41.
35. Потемкин И.С. Функциональные узлы цифровой автоматики. – М.: Энергоатомиздат, 1988. – 320 с.
36. Пупырев Е.И. Перестраиваемые автоматы и микропроцессорные системы. – М.: Наука, 1984. – 191 с.
37. Савельев А.Я. Прикладная теория автоматов. – М.: Радио и связь, 1989. – 208 с.
38. Сагунов В.Г. Алгоритмы технического диагностирования дискретных устройств. – М.: Радио и связь, 1990. – 111 с.
39. Сагомонян Е.С., Слабаков Е.В. Самопроверяемые устройства и отказоустойчивые системы. – М.: Радио и связь, 1989. – 208 с.
40. Скосырский Г.С., Мухопад Ю.Ф. Устройство функционального контроля БИС памяти. – А.с. № 1547034 СССР, БИ №*, 1990.
41. Соловьев В.В., Климович А. Логическое проектирование цифровых систем на основе программируемых логических интегральных схем. – М.: Горячая линия-Телеком, 2008. – 375 с.
42. Суров В.П., Шаманов В.И. Методы минимизации функций алгебры логики. – ИрГУПС, Красноярск, 2006. – 21 с.
43. Смагин А.А. Организация сжатия информации в табличных структурах. – Саратов: СГУ, 1985. – 124 с.
44. Рудковский В.П., Мухопад Ю.Ф. Оптимизация математического базиса управляющих систем // Автоматизированные системы контроля и управления на транспорте. Вып. 5. – Иркутск: ИрИИТ, 1999. – С. 129–136.
45. Щербаков Н.С. Достоверность работы цифровых устройств. – М.: Машиностроение, 1989. – 224 с.
46. Уилсмхерст Т. Разработка встроенных систем с помощью микроконтроллеров PIC. – Киев: «МК-Пресс»; СПб.: «Корона-век», 2008. – 544 с.
47. Рыцар Б.Е., Кметь А.Б. Новый метод кодирования подфункций в задачах синтеза цифровых устройств. Кибернетика и системный анализ. – 2003. – №2. – С. 63–90.
48. Шалыто А.А. Логическое управление. Методы аппаратной и программной реализации алгоритмов. – СПб.: Наука, 2000.
49. Юдитский С.А., Магергут В.З. Логическое управление дискретными процессами. М.: Машиностроение, 1987. – 175 с.
50. Мухопад Ю.Ф., Бадмаева Т.С. Устройство для программного управления с применением коммутатора. – А.с. № 1087996 СССР, БИ № 15, 1984.
51. Информационные системы. Табличная обработка информации./ ред. Е.П. Балашов, В.Б. Смолов. – Л.: Энергоиздат, 1985. – 179 с.
52. Калабеков Б.А. Цифровые устройства и микропроцессорные системы. М.: ГЛ – Телеком, 2007. – 336 с.
53. Поликарпова Н.И., Шалыто А.А. Автоматное программирование. – СПб.: Питер, 2009. – 176 с.
Редактор Ф.А. Ильина
Подписано в печать 29.03.2010.
Формат 60×84 1/16. Печать офсетная.
Усл. печ. л. 10,75. Уч-изд. л. 11,55.
План 2010 г.
Тираж 200 экз. Заказ
Типография ИрГУПС
г. Иркутск, ул. Чернышевского, 15
 |
* Это правило записи и индексации не является таким уж строгим, если оно применяется к кодам общего типа, не относящимся к двоично-позиционным (ДПК). Для лучшего визуального восприятия таблиц используется и привычная запись x1, х2,..., xm.
* Примечание: Правило (или Теорема) де Моргана приведено далее в § 1.7. Подробнее см. [1, 2 (Основная литература), 38].
* Примечание: В наиболее доступной форме методы минимизации б.ф. изложены в работах [1, 2, 37, 42, 52]. Этот вопрос глубоко исследован в работах [4, 6, 7, 11, 41]. В работе [47] предложен эффективный алгоритм минимизации б.ф. для большого числа переменных. Практические алгоритмы минимизации на базе специальных алгоритмических языков приведены в [6].
* Для удобства восприятия выражения (5) в этом параграфе повторяют выражения (3) из предыдущего параграфа.
* Примечание: системная модель [23] рассмотрена подробно в гл. 2.
* Реализация систем управления технологическими процессами для взрыво- и пожароопасных производств не требует большого быстродействия. Однако отсутствие в этой технике ПЛМ и ПЛИС оправдывает реализацию СО ФПИ на основе логических элементов струйной техники [24].
** С другой стороны, для сверхбыстродействующих систем СВЧ-радиодиапазона и квазиоптических схем уровень интеграции также не велик, потому и здесь структуры СО ФПИ с комбинационными схемами являются наиболее предпочтительными [14, 26]. Более того, в работах [10, 17] показано, что некоторые нейроподобные структуры могут быть реализованы в виде комбинационных схем, а системы контроля программных комплексов выполняются в виде конечных автоматов [53].
*Примечание: Другие таблично-алгоритмические способы более точного вычисления функции, чем метод прямого считывания, приведены в работах [27, 36, 43, 48, 51].
* Примечание: Более подробно вопрос выбора базисов рассмотрен в работах [37, 44].
* Примечание: Другие типы триггеров подробно описаны в литературе по автоматике и вычислительной технике [18, 35, 52].
* Примечание: Модель предложена Ю.Ф. Мухопадом в 1974 г. на международном конгрессе JFAC, развита и обобщена в работах [16, 23].
* Примеч.: Вопросам взаимного преобразования операторных схем (ГСА, ЛСА, МСА, ТСА) алгоритмов посвящена работа [16], а также § 2.5 настоящей главы.
* Автоматы могут быть заданы также перечнем условий переходов и выходов – секвенции. Секвенциональные автоматы не рассматриваются в этом пособии.
* В.А. Горбатов предлагает алгоритм оптимального кодирования, основанный на частотно-матричном методе и построении значения производной для каждой пары состояний [7]. Для минимизации аппаратурных затрат по графу переходов получают кодирующее дерево, из которого следуют коды состояний. Однако алгоритм В.А. Горбатова обеспечивает снижение затрат на реализацию комбинационных схем F1 и F2 всего лишь на 5–10% при их реализации на логике средней интеграции. Для современной техники БИС и СБИС он не дает преимуществ.
В работе [13] предлагается другой подход к «оптимальному» кодированию номеров состояний, основанный на последовательной и параллельной декомпозиции графа переходов автомата. Ю.Г. Карпов говорит о том, что предлагаемая теория отличается «внутренней красотой и может иметь важные применения». Однако нахождение специального кода, приводящего к минимизации системы булевых функций, автор демонстрирует на очень упрощенном примере автомата с одним логическим условием и числом состояний ≤8. Со ссылками на иностранные источники говорится о том, что при увеличении числа логических условий сложность задачи возрастает экспоненциально. Для инженерной практики, когда число состояний ≥32, а число логических условий ~ 10–12, эти методы требуют дополнительной доработки и оценки границ их применимости.
* Имеются герконы с быстродействием (0,51)∙10-3 с.
*Для уменьшения объема ПЗУ в автоматах применяются так называемые ПЛМ – программируемые логические матрицы, представляющие собой БИС, в которой конструктивно объединены матрица элементов «И» для образования конъюнкций переменных из множеств {α}{Z} и матрица элементов «ИЛИ» для объединения этих конъюнкций. Активные элементы матрицы могут настраиваться на проводящее состояние или на «разрыв», например, методом разрушения (прожигания) плавких перемычек. Т.е. ПЛМ одноразово может быть настроена на реализацию любой заданной системы m булевых функций от n переменных, при этом в ПЛМ может образовываться k различных конъюнкций переменных. Поэтому ПЛМ характеризуют тремя параметрами n, k, m. В существующем ряде интегральных схем выпускаются ПЛМ с характеристиками от (8, 24, 4) до (32, 256, 16).
* Реализация системы булевых функций на ПЛМ конкретной серии БИС приводится в справочниках, теоретические вопросы проектирования комбинационных схем на ПЛМ освещены в работах [2, 6, 11, 37, 48].
* Весь объем знаний в области ТДУ, накопленный более чем за 50 лет развития теоретических и прикладных исследований в области анализа и синтеза конечных автоматов, так или иначе используется при конструировании автоматов на ПЛИС.
* Тестовый контроль подробно проработан в [39, 40,45] и сводится к разделению автомата на части и раздельной проверке исправности регистров, счетчиков, дешифраторов и комбинационных схем.
[**] В работе [2] предложено кодировать состояния автомата таким образом, чтобы код памяти а(t) разделить на две части с одной единицей в каждой, т.е. если n разрядов разделены пополам, то один а(t) будет отличаться от другого а(t + 1) положением единицы в n /2 разрядах хотя бы одной половины n -разрядного кода. Однако в любом случае исправный автомат перейдет в новое состояние с «обобщенным» кодом 11. Допустимо также кодирование по принципу 01 или 10.
Этот подход развит в работах В.В. Сапожникова, который также использует коды m C n, когда в n разрядах m единиц, например 2 из 5 или 3 из 8. Предложены и различные способы реализации схем контроля 2 из 5 и др. Метод имеет тот недостаток, что приводит к существенному увеличению разрядности регистров памяти автомата и использованию «объемных» схем контроля для сложных автоматов. Академиком М.А. Гавриловым [1] предложен более обобщенный подход кодирования состояний таким образом, чтобы сумма по модулю 2 кода а(t) и а(t + 1) равнялась заданному числу единиц (расстояние по Хеммингу). Недостаток метода – трудности выполнения этого условия при относительно большом числе логических переходов.
В. Балакиным и В. Барашенковым [3] предложен так называемый комплексный подход динамического контроля, основанный на проверке правильности временной последовательности выходных команд А i и отсутствия замены на А j. Однако схема контроля такого автомата оказывается сложнее самого контролируемого автомата.
* Для аппаратной реализации МПА некоторого снижения сложности реализации можно добиться за счет специальных способов декомпозиции систем булевых функций [6, 7, 11, 48]. Однако даже 1,5–2-кратного упрощения трудно добиться при m + q ³ 16.
* В настоящее время существует достаточно много программных систем, позволяющих осуществлять моделирование и анализ работы автомата в динамике. К таким системам относятся системы схемотехнического моделирования Micro-cap, Electronics Workbench и язык VHDL для моделирования автоматов, вложенных в ПЛИС Altera, Xilinx. Последний серьезный вариант требует особой подготовки в области САПР микропроцессорной техники и поэтому доступен в основном студентам и аспирантам специальности «Вычислительные машины, комплексы, системы и сети».
* Существующие методы контроля ОЗУ и ПЗУ на функционирование ориентированы на применение специальных тестовых последовательностей типа «бабочка», «пинг-понг», «бегущая единица или ноль» и др., сложность которых определяется временной диаграммой функционального контроля (ФК) и оценивается характеристиками вида 2(n + 2n 1/2), 2(2n 2 + 2n), 2(3n2 + 3n), где n – количество элементов памяти (ЭП) в запоминающей матрице ПЗУ [22]. Для ПЗУ с ультрафиолетовым стиранием эти методы ФК не пригодны, т.к. их физическая реализация характеризуется длительным временем программирования (от 0,05 до 0,1 с на слово) и ограниченным количеством циклов перезаписи (<100 циклов).








