 2017-11-30
2017-11-30 368
368а) Ограничение выходного момента:
Устанавили электромагнитный необходимый момент, который двигатель должен развить для обеспечения пуска от 0 до 1000 об/мин за 0.2 сек при моменте сопротивления в 5 Н.м.
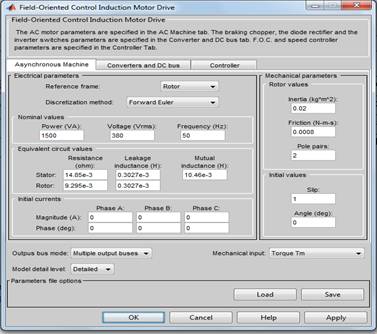
Рисунок 8
б) Изменили ограничения момента вариатора. позволяющие предыдущий пуск. Выполнили моделирования.
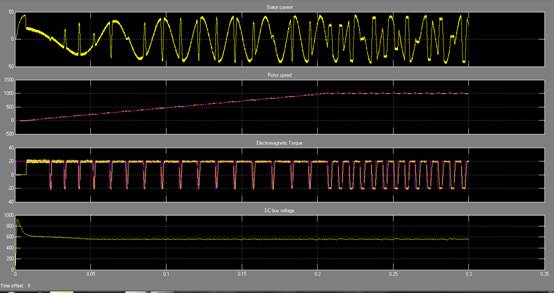
Рисунок 9
с) ПИД Регулятор:
Установили значение пропорционального корректора контура скорости на 100. Запустили моделирование и прокомментировали наши результаты. В особенности обьяснили почему настройка корректора Р имеет очень мало влияния на точность скорости во время пусковой фазы.
д) Установили значения ПИД регулятора:
- пропорциональный коэффициент: 1
- интегральный коффициент: 200

Рисунок 10
Запустили моделирование.

Рисунок 11
Непринятие помех
а) Основываясь на предыдущей ситуации, установили момент +5Н.м при мгновение t=0.25сек. Запустили моделирование.
б) Установили значения ПИД регулятора:
- пропорциональный коэффициент: 1
- интегральный коэффициент: 0

Рисунок 12
Запустили моделирование.
Рисунок 13
с)) Установили значения ПИД регулятора:
- пропорциональный коэффициент: 100
- интегральный коэффициент: 0

Рисунок 14
Запустили моделирование и измерили ошибку по скорости вращения.

Рисунок 15
д) Установили значения ПИД регулятора:
- пропорциональный коэффициент: 1
- интегральный коэффициент: 100

Модельдеуді қосамыз, айналу және жылдамдықтың қателігін қараймыз.

Сурет 13
Жүйені анықтау және түрлендіргіштер
Метод Бройда
Передаточная функция первого порядка определяется соотношением:
W=Gs*e-tdp/1+tp
Y=544*10-3
X=3
Презентация метода:
Идентификацию выполнили в разомкнутом контуре на устойчивой системе (после проведения эксперимента на стенде).
Собрали схему в новом окне:

Рисунок 14
Установили параметры:


Рисунок 15

Рисунок 16

Рисунок 17
В результате получили осциллограмму

Рисунок 19
чтоб устранить "угловатости" вместо 3 поставили 6.

Рисунок 20

Рисунок 21
В результате получили сглаженную осциллограмму

Рисунок 22








