 2018-01-08
2018-01-08 706
706ВСТУП
Метою виконання курсової роботи з дисципліни «Теорія автоматичного керування» є розширення та закріплення теоретичних і практичних знань з питань аналізу та проектування систем автоматичного керування.
Завданням курсової роботи є розвиток практичних навичок самостійного вирішення питань, пов'язаних з визначенням оптимальних параметрів настроювання промислових регуляторів, які мають забезпечити потрібні показники якості процесу при використанні необхідних законів керування.
В результаті попереднього вивчення дисципліни для виконання курсової роботи студент повинен знати:
— основні поняття та дефініції, термінологію, методи визначення функцій передачі розімкнених і замкнених систем керування, часових і частотних характеристик елементів систем та систем керування у цілому;
— основні критерії стійкості;
— прямі показники, кореневі, частотні та інтегральні оцінки якості керування;
— способи реалізації різних законів керування в промислових регуляторах;
— методи визначення оптимальних параметрів настроювання регуляторів;
— можливості програмного середовища «Mathcad».
В результаті виконання курсової роботи студент повинен вміти:
— визначати оптимальні параметри настроювання ПІ- і ПІД-регуляторів, які мають забезпечити потрібний запас стійкості по модулю та фазі;
— визначати оптимальні параметри настроювання ПІ- і ПІД-регуляторів, які мають забезпечити необхідні кореневі оцінки якості;
— визначати оптимальні параметри настроювання ПІ- і ПІД-регуляторів, які мають забезпечити заданий частотний показник коливальності;
— розраховувати та будувати перехідні характеристики об'єктів і замкнених систем керування як за формулою розкладення, так і використовуючи стандартні процедури «Mathcad»;
— визначати основні прямі показники якості керування у стабілізуючому та слідкуючому режимах ПІ- і ПІД-регуляторів;
— робити порівняльний аналіз процесів керування для різних типів регуляторів.
Тематика курсової роботи пов’язана з визначенням оптимальних параметрів настроювання ПІ- і ПІД-регуляторів у стабілізуючому та слідкуючому режимах при заданих параметрах об'єкту керування, що містить чисте запізнення, які мають забезпечити відповідні кореневі та частотні оцінки якості керування. Вказані параметри, а також задані оцінки якості керування, видаються індивідуально кожному студенту викладачем на першому тижні навчального семестру, у якому виконується курсова робота (варіанти завдань наведені у додатку 1).
Курсова робота складається з двох частин: текстової (розрахунково-пояснювальна записка) та графічної (графіки, які ілюструють визначення оптимальних параметрів настроювання регуляторів, та графіки відповідних перехідних характеристик).
Розрахунково-пояснювальна записка виконується на стандартних аркушах формату А4 з дотриманням вимог відповідних ДЕСТ′ів щодо оформлення текстових конструкторських документів.
У першому розділі розрахунково-пояснювальної записки наводиться коротка характеристика об′єкту керування, та виконуються необхідні розрахунки, що пов′язані з побудовою його перехідної характеристики за формулою розкладення. Розділ закінчується побудовою двох перехідних характеристик на одному графіку, одна з яких є результатом отриманих даних по проведеним розрахункам за формулою розкладення, а друга – з використанням стандартної функції зворотного перетворення «Mathcad».
У 2 розділі текстової частини записки необхідно навести обґрунтування формул, за якими розраховуються параметри настроювання Ку та Ті промислових регуляторів для ПІ- і ПІД-законів керування, які мають забезпечити вказані у завданні оцінки якості керування (Lз, γз, h, m, M). Цей розділ завершуються побудовою графіків АЧХ Аоб(ω), ФЧХ φоб(ω) та графік взаємозалежності параметрів настроювання для відповідних регуляторів Ку і Ті та визначенням їх оптимальних значень.
У третьому розділі виконується розрахунок та побудова перехідних характеристик у слідкуючому та стабілізуючому режимах замкнутих систем керування, в яких використані ПІ- або ПІД-закони керування для значень параметрів настроювання регуляторів Ку та Ті, визначених при виконанні розділу 2. Розділ закінчується визначенням основних показників якості та оцінок якості керування: перерегулювання σ,%; часу керування tк,с; степені стійкості h; показника загасання ψ,% та кореневого показника коливальності m.
У четвертому розділі наводиться порівняльний аналіз отриманих результатів при виконанні третього розділу та короткі висновки.
Графічна частина виконується на двох стандартних аркушах формату А1 з дотриманням необхідних вимог діючих ДЕСТ'ів, містить відповідні графіки та текстові надписи.
На першому аркуші розміщуються обидві перехідні характеристики об’єкту керування у загальній системі координат, розраховані за двома вищезгаданими методами, поряд з якими записують функцію передачі об’єкту керування з усіма числовими значеннями параметрів, відповідно до завдання. Нижче розташовують графіки АЧХ Аоб(ω), ФЧХ φоб(ω) об’єкту керування поряд з якими записують аналітичні вирази відповідних частотних характеристик. Окрім того, по відповідній ФЧХ необхідно визначити частоти ω-π/2 та ω-π, при яких фазовий зсув дорівнює значенням –π/2 та –π, записати ці значення під аналітичним виразом φоб(ω). Діапазон частот від ω-π/2 до ω-π слід використати для побудови графіку взаємозалежності параметрів настроювання для відповідних регуляторів Ку і Ті та визначення оптимальних параметрів настроювання ПІ- і ПІД-регуляторів.
На другому аркуші треба відобразити два графіки взаємозалежності параметрів настроювання для відповідних регуляторів Ку і Ті у загальній системі координат, один з яких відповідає межі стійкості, інший з відповідною дотичною визначає співвідношення параметрів настроювання, при яких в системі керування має бути забезпечене запропоноване у завданні потрібне значення оцінки якості керування. Поряд з цими графіками слід записати значення оптимальних параметрів настроювання регулятора, які визначаються у точці дотику. Нижче слід зобразити АФЧХ об’єкту керування та розімкненої системи керування у загальній системі координат, поряд з якими треба записати визначені по цих графіках запас стійкості по модулю Lз й по фазі γз. На цьому ж аркуші необхідно побудувати перехідні характеристики замкненої системи керування у слідкуючому і стабілізуючому режимах, поряд з якими привести основні показники якості та оцінки якості керування: перерегулювання σ,%; час керування tк,с; степінь стійкості h; показник загасання ψ,% та кореневий показник коливальності m.
Теоретичне введення до виконання розділів курсової роботи.
1.1. Побудова перехідної характеристики об’єкта керування.
Перехідна характеристика h(t) може бути побудована двома способами: використовуючи теорему розкладення, або, що значно простіше, за допомогою стандартної операції зворотного перетворення Лапласа програмного продукту „Mathcad”.
У першому випадку спочатку потрібно знайти перетворення за Лапласом вихідної величини
h(p)  , (1.1)
, (1.1)
де F1(p) – чисельник h(p),
F2(p) – знаменник.
Потім потрібно знайти корені рк характеристичного рівняння F2(p)=0 і для визначення перехідної функції h(t) підставити їх числові значення у відповідний вираз:
h(t)=  , (1.2)
, (1.2)
де  - похідна знаменника h(p) по р.
- похідна знаменника h(p) по р.
У другому випадку, після запису виразу для h(p), потрібно скористатися функцією „Mathcad” „invlaplace”.
1.2. Визначення оптимальних настроювань промислових регуляторів, які мають забезпечити заданий запас стійкості по модулі Lз та по фазі γз.
Пропорціонально-інтегральний (ізодромний) регулятор (Lз; γз=const).
Структурна схема розімкнутої системи автоматичного керування має вигляд:
 |
де: Wp(p) − функція передачі регулятора;
Wоб(p) − функція передачі об’єкта керування;
ε(p) – зображення по Лапласу помилки керування;
µ(р) – зображення по Лапласу керуючого впливу на
об'єкт керування;
X(p) – керована величина (координата стану об'єкта керування).
Функція передачі ПІ-регулятора:
 (2.1)
(2.1)
Параметрами настроювання ПІ-регулятора є коефіцієнт передачі регулятора  і стала часу інтегрування (час подвоєння)
і стала часу інтегрування (час подвоєння)  .
.
Функція передачі розімкненої системи, керуюча частина якої представлена ПІ-регулятором:
 (2.2)
(2.2)
Комплексний коефіцієнт передачі розімкненої системи:
 , (2.3)
, (2.3)
маючи на увазі, що:  (2.4)
(2.4)
Для знаходження параметрів ПІ-регулятора, які відповідають межі стійкості ( ;
;  ) слід використати вимогу, що випливає з критерію стійкості Найквіста: АФЧХ розімкненої системи
) слід використати вимогу, що випливає з критерію стійкості Найквіста: АФЧХ розімкненої системи  повинна проходити через точку
повинна проходити через точку  ;
;  .
.
Заданий запас стійкості по модулю  , при відсутності збурень, які викликають додатковий зсув фази, забезпечується, якщо
, при відсутності збурень, які викликають додатковий зсув фази, забезпечується, якщо  проходить через точку D1. При цьому, положення точки D1 визначається заданим запасом стійкості по модулю
проходить через точку D1. При цьому, положення точки D1 визначається заданим запасом стійкості по модулю  :
:
 (2.5)
(2.5)
Оскільки ОС = 1, то  .
.
Заданий запас стійкості по фазі  , при відсутності збурень, які впливають на величину модуля комплексного коефіцієнта передачі, забезпечується, якщо
, при відсутності збурень, які впливають на величину модуля комплексного коефіцієнта передачі, забезпечується, якщо  проходить через точку D2, яка розташована на промені, проведеному з початку координат під кутом до дійсної осі, який дорівнює
проходить через точку D2, яка розташована на промені, проведеному з початку координат під кутом до дійсної осі, який дорівнює  . Довжина відрізку OD2, як і ОС, дорівнює одиниці.
. Довжина відрізку OD2, як і ОС, дорівнює одиниці.
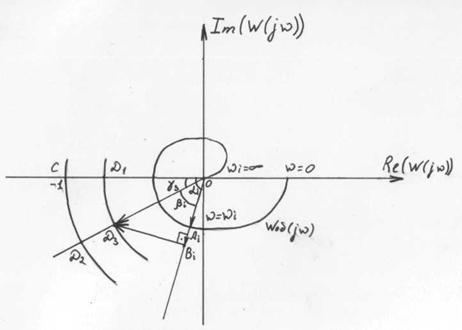
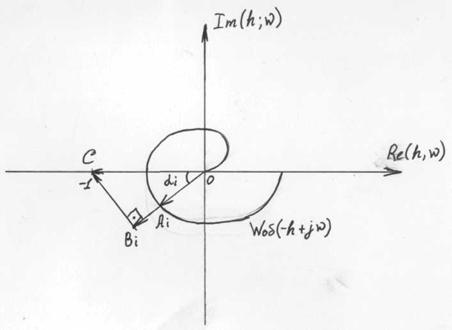
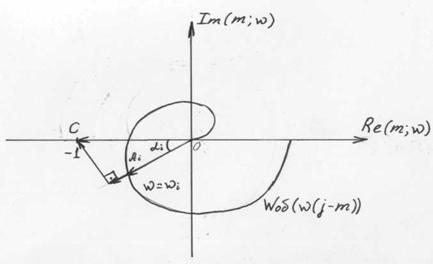
Якщо необхідно забезпечити заданий запас стійкості і по модулю , і по фазі одночасно, АФЧХ розімкненої системи повинна пройти через точку D3, розміщеної на тім же промені на відстані від початку координат, як і точка D1:
 (2.6)
(2.6)
Побудуємо АФЧХ об’єкту керування  , нанесемо вказані точки: С, D1, D2, D3, и проведемо вектор
, нанесемо вказані точки: С, D1, D2, D3, и проведемо вектор  для довільної частоти
для довільної частоти  . Провівши перпендикуляр з точки D3 до вказаного вектора, отримаємо прямокутний трикутник
. Провівши перпендикуляр з точки D3 до вказаного вектора, отримаємо прямокутний трикутник  , для якого справедливе рівняння:
, для якого справедливе рівняння:
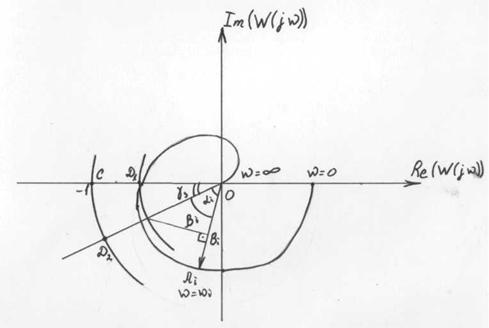
У трикутнику , сторони  та
та 
 взаємно перпендикулярні. Зіставляючи останній вираз з вищенаведеною формулою для
взаємно перпендикулярні. Зіставляючи останній вираз з вищенаведеною формулою для  , можна прийти до висновку, що:
, можна прийти до висновку, що:
 ;
;
 (2.7)
(2.7)
Співмножник  свідчить про те, що вектор, який відповідає другому додатку виразу , повернутий по годинниковій стрілці на
свідчить про те, що вектор, який відповідає другому додатку виразу , повернутий по годинниковій стрілці на  відносно першого.
відносно першого.
Довжини відрізків  , и
, и  відповідно:
відповідно:
 (2.8)
(2.8)
З цього випливає, що коефіцієнт передачі  и стала часу інтегрування
и стала часу інтегрування  можуть бути визначені по формулам:
можуть бути визначені по формулам:
 ; (2.9)
; (2.9)
 (2.10)
(2.10)
З трикутника неважко визначити:


де:  ;
;
 ;
;
 .
.
Підставивши значення (6), отримаємо:
 ; (2.11)
; (2.11)
 . (2.12)
. (2.12)
У підсумку:
 ; (2.13)
; (2.13)
 . (2.14)
. (2.14)
Змінюючи ωі від 0 до  , можна отримати для
, можна отримати для  и
и  два одномірних масиву значень, за якими слід побудувати графік взаємозв’язку обох параметрів настроювання ПІ-регулятора
два одномірних масиву значень, за якими слід побудувати графік взаємозв’язку обох параметрів настроювання ПІ-регулятора 
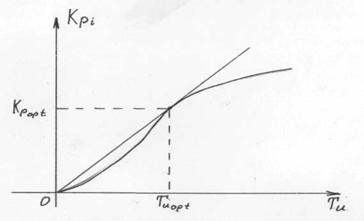
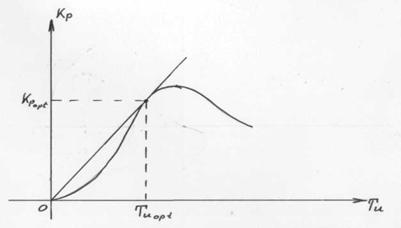
Доказано, що оптимальними параметрами є значення  и
и  , при яких спостерігається максимум відношення
, при яких спостерігається максимум відношення  . Цьому максимуму відповідають значення Крі і Тіі в точці дотику дотичної, проведеної з початку координат до кривої
. Цьому максимуму відповідають значення Крі і Тіі в точці дотику дотичної, проведеної з початку координат до кривої  .
.
У підсумку слід відзначити, що отримані формули для визначення  та
та  не потребують будь-якого трансформування для окремих випадків, в яких потрібно визначити вказані параметри настроювання ПІ-регулятора при нульових запасах стійкості по модулю або по фазі, а також для забезпечення знаходження системи на межі стійкості. В останньому випадку ,
не потребують будь-якого трансформування для окремих випадків, в яких потрібно визначити вказані параметри настроювання ПІ-регулятора при нульових запасах стійкості по модулю або по фазі, а також для забезпечення знаходження системи на межі стійкості. В останньому випадку ,  . В подальших розмірковуваннях для других типів регуляторів, можна розглядати тільки загальний випадок, тобто забезпечення необхідних запасів стійкості і по модулю, і по фазі одночасно, в якому необхідною умовою є проходження АФЧХ розімкненої системи через точку D3.
. В подальших розмірковуваннях для других типів регуляторів, можна розглядати тільки загальний випадок, тобто забезпечення необхідних запасів стійкості і по модулю, і по фазі одночасно, в якому необхідною умовою є проходження АФЧХ розімкненої системи через точку D3.
Пропорціонально – інтегрально – диференціальний регулятор
(ізодромний з упередженням) (Lз; γз=const).
Усі вищенаведені рекомендації справедливі і для даного типу регулятора, але мають місто деякі відміни в отриманні формул для визначення  и
и  . Це обумовлено тим, що функція передачі ПІД-регулятора:
. Це обумовлено тим, що функція передачі ПІД-регулятора: 
 (2.15)
(2.15)
У принципі, такий регулятор має три параметра настроювання: коефіцієнт передачі , постійна інтегрування і постійна диференціювання (упередження)  . Однак, для спрощення розрахунків часто задаються значенням коефіцієнта упередження
. Однак, для спрощення розрахунків часто задаються значенням коефіцієнта упередження  , при цьому параметрів настроювання залишається два, функція передачі ПІД-регулятора приймає вигляд:
, при цьому параметрів настроювання залишається два, функція передачі ПІД-регулятора приймає вигляд:
 (2.16)
(2.16)
Комплексний коефіцієнт передачі розімкненої системи:
 (2.17)
(2.17)
Побудуємо АФЧХ об’єкту керування, проведемо промінь з початку координат під кутом, який дорівнює  , нанесемо характерні точки:
, нанесемо характерні точки:  ,
,  ,
,  ,
,  ; проведемо вектор для довільної частоти
; проведемо вектор для довільної частоти  . Опустимо перпендикуляр з точки на цей промінь. В результаті побудови отримаємо прямокутний трикутник
. Опустимо перпендикуляр з точки на цей промінь. В результаті побудови отримаємо прямокутний трикутник  , в якому:
, в якому:
 .
.
При цьому:  .
.
Зіставляючи вектори, позначені на рисунку, з виразом для комплексного коефіцієнта передачі розімкненої системи (17), можна стверджувати на основі збіжності, що:
 ;
;
 ;
;
 . (2.18)
. (2.18)
Довжини відповідних відрізків
 ;
;
 ; (2.19)
; (2.19)
 . (2.20)
. (2.20)
З  :
:
 ; (2.21)
; (2.21)
 ; (2.22)
; (2.22)
 (2.23)
(2.23)
де  ,
,
 ,
,
 .
.
З (19) та (21) отримаємо:
 (2.22)
(2.22)
З (23), враховуючі (19), (20) маємо:
 , (2.23)
, (2.23)
тобто:
 . (2.24)
. (2.24)
Фізично  >0, тому перед коренем беремо знак “плюс”.
>0, тому перед коренем беремо знак “плюс”.
Остаточно маємо:
 . (2.25)
. (2.25)
 |
Змінюючи ωі від 0 до
, можна отримати для  и
и  два одномірних масиву значень, за якими можна побудувати графік взаємозв’язку обох параметрів настроювання ПІ-регулятора
два одномірних масиву значень, за якими можна побудувати графік взаємозв’язку обох параметрів настроювання ПІ-регулятора  .
.
Провівши дотичну з початку координат до кривої, у точці дотику отримаємо оптимальні значення  и
и  .
.
1.3. Параметри регуляторів, які забезпечують задану
степінь стійкості h та кореневий показник коливальности m.
ПІ-регулятор (h = const).
Функція передачі розімкненої системи, що включає у своєму складі ПІ-регулятор:

Якщо у формулу передатної функції розімкнутої системи замість  підставити
підставити  , то уявна вісь у відповідній комплексній площині розподілу коренів відобразить на межу стійкості, а межу області із заданим степенем стійкості
, то уявна вісь у відповідній комплексній площині розподілу коренів відобразить на межу стійкості, а межу області із заданим степенем стійкості  . У такому випадку амплітудно-фазова частотна характеристика називається розширеної по h і для забезпечення заданого степеня стійкості повинна проходити через критичну точку
. У такому випадку амплітудно-фазова частотна характеристика називається розширеної по h і для забезпечення заданого степеня стійкості повинна проходити через критичну точку  .
.
Відповідно до вищенаведеного виразу для функції передачі розімкненої системи  , розширена по
, розширена по  АФЧХ розімкненої системи може бути записана у вигляді:
АФЧХ розімкненої системи може бути записана у вигляді:
 (3.1)
(3.1)
Перетворимо праву частину цього виразу після підстановки розширеної по АФЧХ ПІ-регулятора, враховуючи (2.1):
 (3.2)
(3.2)
З отриманого випливає, що розширена по  АФЧХ розімкнутої системи
АФЧХ розімкнутої системи  являє собою суму двох взаємо-перпендикулярних векторів.
являє собою суму двох взаємо-перпендикулярних векторів.
Зобразимо в комплексній площині розширену по АФЧХ об'єкта керування і, маючи на увазі, що для знаходження межі області із заданим ступенем стійкості, розширена по АФЧХ розімкнутої системи повинна перетинати точку  , зробимо додаткові побудови.
, зробимо додаткові побудови.
Проведемо вектор розширеної АФЧХ об'єкта  для довільної частоти . З точки С опустимо перпендикуляр
для довільної частоти . З точки С опустимо перпендикуляр  на продовження вектору .
на продовження вектору .
Результат виконаних побудов можна трактувати в такий спосіб:
 ;
;
Отже, зіставляючи з отриманим вище:
 ;
;
 ; (3.3)
; (3.3)
 . (3.4)
. (3.4)
З  :
:
 , (3.5)
, (3.5)
де  .
.
Підставляючи (3.3), (3.4) в (3.5), отримуємо:
 ; (3.6)
; (3.6)
звідки:
 (3.7)
(3.7)
З того ж трикутника:
 ;
;  ,
,
отже:
 , (3.8)
, (3.8)
звідки:
 . (3.9)
. (3.9)
Після підстановки  одержуємо остаточно:
одержуємо остаточно:
 . (3.10)
. (3.10)
ПІ-регулятор (m=const).
Якщо у виразі передатної функції здійснити заміну оператора Лапласа  на
на  , то уявна вісь комплексної площини розміщення коренів характеристичного рівняння відображає межу області із заданим значенням кореневого показника коливальності
, то уявна вісь комплексної площини розміщення коренів характеристичного рівняння відображає межу області із заданим значенням кореневого показника коливальності  . Амплітудно-фазова частотна характеристика
. Амплітудно-фазова частотна характеристика  називається розширеної по m, повинна проходити через точку
називається розширеної по m, повинна проходити через точку  для забезпечення заданого кореневого показника коливальності.
для забезпечення заданого кореневого показника коливальності.
Розширена АФЧХ по m розімкнутої системи, у складі якої працює ПІ-регулятор:
 . (3.11)
. (3.11)
Після виконання необхідних перетворень:
 (3.12)
(3.12)
Отриманий вираз свідчить про те, що будь-який вектор розширеної по m АФЧХ розімкнутої системи являє собою суму двох взаємо-перпендикулярних векторів.
Зобразимо в комплексній площині розширену по m АФЧХ об'єкта керування; для довільної частоти  проведемо вектор
проведемо вектор  , на продовження якого опустимо перпендикуляр із точки С.
, на продовження якого опустимо перпендикуляр із точки С.
З рисунка випливає, що:
;
Зіставляючи з вищенаведеним виразом для розширеної АФЧХ розімкнутої системи, можна прийняти:
 ; (3.13)
; (3.13)
 ; (3.14)
; (3.14)
 . (3.15)
. (3.15)
Із трикутника  :
:
 (3.16)
(3.16)
де:  .
.
Підставимо значення довжин відрізків  й в (3.16):
й в (3.16):
 (3.17)
(3.17)
звідки:
 (3.18)
(3.18)
З того ж трикутника:
 , ОС=1,
, ОС=1, 
Отже:
 (3.19)
(3.19)
звідки,
 . (3.20)
. (3.20)
Після підстановки  одержимо:
одержимо:
 . (3.21)
. (3.21)
ПІД-регулятор (h=const)
Функція передачі розімкнутої системи з ПІД-регулятором має вигляд:
Щоб скористатися розширеною по h АФЧХ, необхідно здійснити заміну  :
:

 (3.22)
(3.22)
Для спрощення введемо коефіцієнт упередження  :
:
 (3.23)
(3.23)
Повертаючись до малюнка, на якому зображена розширена по h АФЧХ об'єкта керування, можна затверджувати, що:
 =
=  (3.24)
(3.24)
 (3.25)
(3.25)
В отриманому виразі слід брати знак „ - ” перед коренем, оскільки у випадку, якщо htgaI-wI < 0, у цілому знаменник буде негативним, тому розраховане значення Ті виявиться також негативним, що суперечить фізичному змісту сталої інтегрування.
Тому за розрахункову формулу варто прийняти:
 .(3.26)
.(3.26)
Коефіцієнти передачі регулятора Крi визначаються з виразу:
 . (3.27)
. (3.27)
ПІД-регулятор (m=const)
Для розрахунку параметрів настроювання, які б задовольняли вимогам забезпечення необхідного значення кореневого показника коливальності m, можна скористатися розширеною по m АФЧХ об'єкта керування. Порядок розрахунку аналогічний попередньому.
Розширена АФЧХ розімкнутої системи, у складі якої є ПІД-регулятор, має наступний опис:
 (3.28)
(3.28)
Як і попередніх випадках:
=  (3.29)
(3.29)
 (3.30)
(3.30)
Ввівши коефіцієнт попередження  , одержимо вираз:
, одержимо вираз:
 i=
i=  (3.31)
(3.31)
 (3.32)
(3.32)
З огляду на те, що
 , а
, а  ,
,
де  ,
,
можна записати:
 , (3.33)
, (3.33)
звідки

в отриманому виразі, як й у попередньому випадку, перед коренем варто брати знак „ - ”:
 (3.34)
(3.34)
Коефіцієнти передачі ПІД-регулятора Kpі можна визначити по формулі:
 (3.35)
(3.35)
Побудувавши графік залежності Крі = f(Tii) і провівши до нього дотичну з початку координат, у точці дотику отримаємо оптимальні значення параметрів настроювання ПІД-регулятора Крopt і Тіopt.
1.4. Параметри регуляторів, які забезпечують задане значення частотного показника коливальности М.
ПІ, ПІД-регулятори (М = const).
 В основу цього метода закладений той факт, що в комплексній площині частотний показник коливальності М відтворюється у вигляді кола, центр якого зміщений ліворуч від початку координат по дійсній осі на величину
В основу цього метода закладений той факт, що в комплексній площині частотний показник коливальності М відтворюється у вигляді кола, центр якого зміщений ліворуч від початку координат по дійсній осі на величину
 , (4.1)
, (4.1)
а радіус кола
 . (4.2)
. (4.2)
Зіставляючи величину радіуса кола та зміщення його центру, можна відзначити, що C=RM, тобто
 . (4.3)
. (4.3)
Поділивши чисельник та знаменник на одне й те ж число, наприклад Кр, можна отримати безкінечну кількість кіл для одного й того ж значення М. Вказані кола відрізнятимуться радіусами та зміщенням їх центрів відносно початку координат:
 , (4.4)
, (4.4)
де См, Rм – зміщення центру та радіуси нових кіл.
По суті пропорційна зміна радіусів і зміщень центру означає масштабне перетворення:
 , (4.5)
, (4.5)
де Кр – коефіцієнт масштабування.
При цьому всі кола мають одну властивість, яку легко пояснити на рисунку.
Зобразимо два кола для одного й того ж значення М в комплексній площині, одне з яких (більше) має параметри розраховані по формулам (4.1), (4.2), а друге (менше) являє собою масштабне перетворення з коефіцієнтом перетворення Кр.
З рисунка випливає, що  , тобто всі кола, що відповідають одному й тому ж значенню М, дотичні до променя, проведеного з початку координат під кутом γ до дійсної осі:
, тобто всі кола, що відповідають одному й тому ж значенню М, дотичні до променя, проведеного з початку координат під кутом γ до дійсної осі:
γ=arc sin  . (4.6)
. (4.6)
Для забезпечення потрібного частотного показника коливальності необхідно, щоби АФЧХ розімкнутої системи W(jω) була дотичною до кола, радіус якого R, а зміщення центру C. Якщо АФЧХ розімкнутої системи W(jω), яка побудована для конкретного значення Ті=const і Кр=1, буде дотичною до масштабного кола, то збільшивши всі вектори АФЧХ у Кр разів, вона стане дотичною до розрахункового кола. Такий підхід дає можливість графічним методом визначати коефіцієнт передачі ПІ – і ПІД – регуляторів при конкретних значеннях сталої часу інтегрування. Але такий спосіб дуже трудомісткий та досить неточний. Значно краще визначати параметри настроювання регуляторів аналітичним методом, який базується на розрахунках по відповідним формулам.
|
, у точці L. Проведемо ще один промінь з початку координат через точку дотику А масштабного кола до АФЧХ розімкнутої системи W(jωs). Цей промінь перетне розрахункове коло у точках B i D. Зрозуміло, що якщо змінити коефіцієнт передачі регулятора з одиниці на відповідне значення Кр, то АФЧХ розімкнутої системи W(jωs) буде дотичною до розрахункового кола у точці В; тобто ОВ = ОА ∙ Кр.
 |
Отримані на рисунку відрізки:
СК = СВ = R;
CML = CMA = RM =  ;
;
ОС = С;
ОСМ = СМ =  ; (4.7)
; (4.7)
ОА =  ;
;
ОВ = ОА ∙ Кр =  ∙ Кр.
∙ Кр.
Отже, розглянемо трикутник ОСВ. Згідно з теоремою косинусів:
СВ2 = ОС2 + ОВ2 – 2 ∙ ОС ∙ ОВ ∙ cosαs, (4.8)
де αі = π + arg W(jωi).
Приймаючі до уваги (4.7), запишемо:
 , (4.9)
, (4.9)
або:  , (4.10)
, (4.10)
звідки:  . (4.11)
. (4.11)
Підставивши (4.1), (4.2), та приймаючі до уваги, що АФЧХ розімкнутої системи W(jωs) має буде дотичною до розрахункового кола з правого його боку, перед коренем слід брати знак „ - ”, на завершення маємо:
 . (4.12)
. (4.12)
Таким чином для прийнятого значення Ті=const можна отримати одномірний масив значень коефіцієнта передачі регулятора, які треба обчислювати за вищенаведеною формулою (4.10). З цього масиву, як значення Кр, треба вибрати мінімальне значення Крmin на інтервалі 0≤αі≤γ; у такому разі знайдене значення Кр відповідатиме дотику АФЧХ розімкнутої системи W(jωs) до розрахункового кола, а не його перетину.
Надаючи різні значення сталій часу інтегрування Ті та розраховуючи відповідне для кожного з них значення коефіцієнта передачі регулятора Кр, можна побудувати графік взаємозалежності Кр = f(Ti), по якому у точці дотику відповідної дотичної знаходять оптимальні значення параметрів настроювання промислових регуляторів Крopt і Тіopt.
У даному випадку параметри настроювання визначаються за однією і тією ж формулою, незалежно від типу закону керування, різниця полягає в побудові АФЧХ розімкнутої системи W(jωs) для ПІ- та ПІД-регуляторів.








