 2014-01-25
2014-01-25 808
808Классификация датчиков
По назначению - силовые,, скоростные, температурные и др. (табл.2):
По принципу действия - механические, электрические, тепловые, акустические, оптические, радиоактивные.
По способу преобразования неэлектрических величин в электрические - активные (генераторные) и пассивные (параметрические). В генераторных датчиках энергия входного сигнала преобразуется (без участия вспомогательных источников энергии) в электрическую энергию выходного сигнала (ток, напряжение, электрический заряд). В параметрических датчиках под действием входного сигнала изменяется какой-либо собственный параметр датчика (емкость, сопротивление, индуктивность). При этом схема включения таких датчиков всегда имеет внешний источник питания.
По конструкции и принципу действия чувствительного элемента датчики подразделяют на контактные и бесконтактные. При этом в контактных датчиках чувствительный элемент взаимодействует непосредственно с контролируемым объектом, а в бесконтактных это взаимодействие отсутствует. К последним относятся фотоэлектрические, ультразвуковые, радиоактивные и специальной конструкции щуповые датчики.
Работа датчиков определяется их статическими, динамическими и частотными характеристиками и оценивается величиной входных и выходных сигналов, чувствительностью, инерционностью и погрешностью. Так как измерение одной и той же физической величины может выполняться с помощью различных датчиков, то их выбор должен обеспечить технические требования, предъявляемые к разрабатываемой системе автоматики технологическим процессом, конструкцией и спецификой эксплуатации машины. Рассмотрим основные разновидности датчиков, используемых в строительных и дорожных машинах и оборудовании.
| Таблица 2 Основной тип датчиков систем управления и контроля | |
| Измеряемые параметры | Тип датчика |
| Механическая деформация | Измеритель смещения, датчик давления, датчик массы |
| Частота | Доплеровский измеритель скорости |
| Температура | Термометр, пирометры излучения, датчик уровня жидкости |
| Давление | Измеритель нагрузки, расходомер |
| Влажность, состав газов | Гигрометр, газовый сигнализатор |
| Звук (в том числе ультразвук) | Эхолот, устройства неразрушающего контроля |
| Свет (в том числе инфракрасное излучение) | Фотодатчик, датчик цвета |
| Радиация, рентгеновское излучение | Датчик уровня, рентгеновский томограф |
| Волновое излучение | Радар, измеритель скорости |
К простейшим устройствам относятся конечные выключатели, ограничивающие линейные или угловые перемещения механизма. В первом случае, например, (рис.176, а) при достижении машиной (башенным, козловым, мостовым кранами) во время перемещения по подкрановым путям крайнего положения, линейка ограничителя 2 нажимает рычаг 1 конечного выключателя и, перемещая его, отключает контактную группу 3, прерывая подачу электроэнергии к механизму передвижения.Во втором случае (рис.176, б) перемещение и укладка каната на барабане грузоподъемной машины производится с помощью шпиндельного выключателя. Он состоит из ходового винта 1, установленного в опорах и соединенного с приводом барабана зубчатой или цепной передачей 3. При вращении винта гайка 2 с удерживаемым канатом перемещается вдоль него в одну иди другую сторону, до момента наезда на переключатели 4, в результате чего происходит отключение управляющей цепи и последующее включение с направлением движения в обратную сторону.
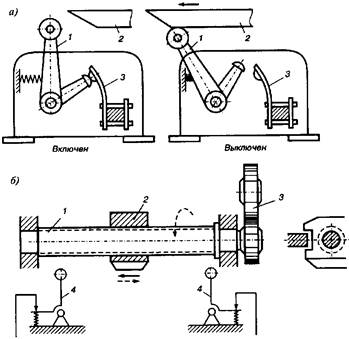 Рис.176. Конечные выключатели Рис.176. Конечные выключатели
|
В автоматических системах широко используются и микропереключатели (рис.177). Они состоят из корпуса. 3, в котором закреплены пластины неподвижных замыкающего 1 и размыкающего 2 контактов, а также подвижного контакта 5 и работающая совместно с ним фигурная пружина 4. Толкатель 7 оснащен возвратной пружиной б и приводится в движение рабочим органом, положение которого контролируется, при достижении им конечного положения. При этом второй контакт обычно используется для включения механизма реверса. Из генераторных преобразователей наибольшее распространение имеют резистивные преобразователи неэлектрических величин, действие которых основано на изменении омического сопротивления от воздействия изменяемой величины. К таким преобразователям относятся различные конструкции потенциометрических датчиков, преобразующих линейные и угловые перемещения в электрический сигнал. Они выполняются в виде переменного сопротивления, т.е. представляют различные конструкции реостатов, подвижный контакт которых связан с преобразуемым элементом.
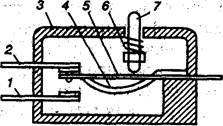 Рис.177. Микропереключатель
Рис.177. Микропереключатель
|
Эти преобразователи состоят из каркаса прямоугольного, круглого или кольцевого сечения (рис.178, а, б), изготовленного из керамики, пластмасс или алюминия, покрытого токонепроводящим лаком.
На каркас может наматываться эмалированная или оксидированная и покрытая лаком проволока из константана, нихрома, манганина, а также нанесен слой полупроводника или металлической пленки.
Подвижная токосъемная щетка скользит по зачищенной контактной дорожке (непосредственно по проволоке или по соединенным с ней контактам).
Наряду с рассмотренными преобразователями при измерении углов наклона конструкций и рабочих органов строительных машин используются также и преобразователи, в которых высокоомное сопротивление шунтируется ртутью или проводящей жидкостью (рис.178, в). При необходимости получения нелинейной характеристики в системах автоматики применяются линейные преобразователи с шунтирующими сопротивлениями (рис.178, г), а также функциональные преобразователи с профилированным или ступенчатым каркасом, позволяющим получать переменные резисторы с квадратичной, логарифмической или другой функциональной зависимостью.
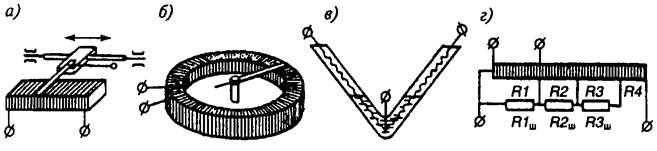 Рис.178. Реостатные преобразователи
Рис.178. Реостатные преобразователи
|
При значительных изменениях давлений, а также для измерений деформаций в элементах конструкций и узлов машин используются тензометрические и пьезоэлектрические преобразователи. Их работа основана на явлении тензометрического эффекта, т.е. на изменении электрического сопротивления чувствительного элемента от его деформации. В качестве чувствительных элементов, называемых тензолитами, в датчиках используются стержни из порошка сажи, графита или угля, наклеенные на полоске бумаги 2 (рис.179, а). Однако наибольшее распространение получили датчики с проволочными элементами из константана, нихрома или фольги. Проволока диаметром, 0,02...0,05 мм или фольга 1 с медными выводами 3 наклеивается в виде прямоугольных или кольцевых петель на бумагу или пленку из изоляционного материала 2 (рис.179, б, в, г).
Тензопреобразователи приклеиваются на поверхность детали 4, деформация которой измеряется, и с помощью соединительных проводов подключается к измерительному электрическому мосту. Схема подключения зависит от количества тензодатчиков и вида измеряемой деформации (растяжение, сжатие, изгиб, кручение). При этом, если деталь или конструкция сжимается или Растягивается, то вместе с ней деформируются и наклеенные датчики, изменяющие величину своего сопротивления. Тензодатчики обычно включаются по мостовой схеме. В последнее время широкое применение получили тензодатчики
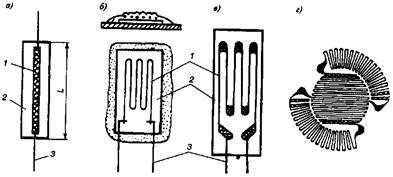 Рис.179. Тензометрические преобразователи Рис.179. Тензометрические преобразователи
|
полупроводниковые из германия и кремния, чувствительность которых в 50...100 раз выше проволочных, а значительный уровень выходного сигнала позволяет обходиться без усилительной аппаратуры. Однако они имеют и существенные недостатки, одним из которых является значительно пониженные температурные характеристики. С помощью пьезоэлектрических преобразователей механическая энергия преобразуется в электрическую в связи с возникновением электрических зарядов на поверхностях кристаллов некоторых диэлектриков (например, титаната бария)
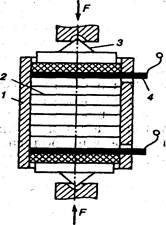 Рис.180. Пьезоэлектрический преобразователь
Рис.180. Пьезоэлектрический преобразователь
|
при механическом воздействии на них. Пьезоэлектрический датчик усилий (рис.180) представляет собой корпус 1, в котором расположены пьезоэлектрические пластины 2. Усилия Р передаются на пластины через опорные плиты 4, а полученный сигнал снимается с металлических обкладок. К этому же типу датчиков относятся металлические и полупроводниковые термометры сопротивления, предназначенные для измерения температуры в диапазоне от -50 до +180 °С для медных и от -250 до +650 °С для платиновых термометров сопротивления.
В параметрических датчиках, представляющих индуктивные и емкостные преобразователи, питание осуществляется от переменного тока. Принцип работы этих преобразователей основан на изменении реактивного сопротивления в зависимости от величины зазора между неподвижной и подвижной частями.
Имеется много различных конструкции индуктивных преобразователей. Наибольшее распространение получили преобразователи с подвижным якорем (рис.181, а) и соленоидного типа (рис.181, б). Они используются для измерения небольших линейных и угловых перемещений, деформаций и в управлении следящими системами. Преобразователь состоит из магнитопровода 2 с обмоткой 1 и якоря 3 соединенного с рабочим органом машины или. ОГП кранов. Изменение воздушного зазора δ, представляющего входную величину, изменяет, в свою очередь, индуктивность и сопротивление обмотки дросселя. При этом увеличение зазора уменьшает индуктивность и сопротивление обмотки и ведет к увеличению тока. Дифференциальные трансформаторы с подвижным сердечником используются в основном в электрических измерительных преобразователях с силовой
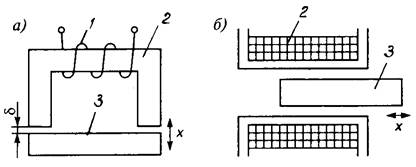 Рис.181. Простые индуктивные преобразователи
Рис.181. Простые индуктивные преобразователи
|
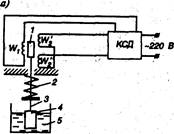  Рис.182. Дифференциальные трансформаторы с подвижным сердечником
Рис.182. Дифференциальные трансформаторы с подвижным сердечником
|
компенсацией в качестве индикатора рассогласования. Такой преобразователь представляет цилиндрический каркас с перемещающимся сердечником. По всей длине каркаса навита первичная обмотка W1, поверх которой симметрично расположены две вторичные обмотки W1′ и W2", выполненные в виде двух одинаковых катушек. Индикатор уровня типа ДИУ-СЧА (рис.182, а) устроен и работает следующим образом. Сердечник 1, перемещающийся внутри катушек с обмотками, связан посредством жесткой тяги 3 с поплавком 4, находящимся в баке 5 с контролируемой жидкостью. Для уравновешивания выталкивающей силы при изменении уровня жидкости и соответствующего перемещения подлавка и сердечника служит пружина 2. При положении сердечника в средней части трансформатора во вторичных обмотках индуктируются одинаковые электродвижущие силы (ЭДС) и разность потенциалов ΔU на выходе трансформатора равна нулю. Перемещение сердечника вверх вызывает увеличение ЭДС индуктируемой в обмотке W2’, ее уменьшение в обмотке W2" и появление сигнала ΔU на выходе, значение которого фиксируется прибором КСД-3.
Работа широко используемого поворотно-трансформаторного датчика (рис.182, б) состоит в изменении индукции в обмотках датчика W1 при угловом перемещении сердечника (ротора) с обмоткой WВ, соединенного с поворотным устройством машины. На обмотку возбуждения WВ подается входное напряжение Uвх, а с обмоток W1 снимается выходное напряжение Uвых. При фиксированном установочном положении ротора ЭДС в обмотках W1 равны между собой и Uвых = 0. После перемещения ротора в обмотках W1 создаются различные значения ЭДС и происходит изменение напряжения Uвых от минимального до максимально возможного (при αмах=90°).
Тахогенераторы представляют собой маломощные (до 100 Вт) электрические машины переменного или постоянного тока для преобразования скорости механического вращения в электрический сигнал. Тахогенератор переменного тока (рис.183., а) состоит из ряда расположенных на статоре 1 обмоток 2, соединенных между собой последовательно. Ротор 3 является постоянным магнитом и выполняется в виде
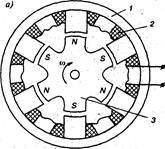 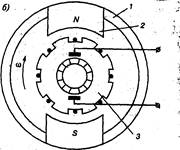 Рис.183. Тахогенераторы
Рис.183. Тахогенераторы
|
специальной звездочки или стержня с числом полюсов, равным числу обмоток. Тахогенератор постоянного тока (рис.183, б) является аналогичным генератором с независимым возбуждением от постоянных магнитов 2, установленных в статоре 1. В пространстве между полюсами магнита вращается якорь генератора с обмоткой, с контактной дорожки которого с помощью щеток снимается значение ЭДС. На выходе с тахогенераторов снимается напряжение, пропорциональное частоте вращения.
Емкостные преобразователи в общем случае представляют собой конденсатор, емкостное сопротивление которого изменяется при изменении входной регулируемой величины (зазора между подвижной и неподвижной частями). Эти преобразователи делятся на конструкции с переменной длиной зазора (рис.32, а) и с переменной площадью пластин (рис.184, б). В преобразователе с изменяемым зазором измеряемая величина воздействует на среднюю подвижную пластину, которая изменяет расстояние d между основными неподвижными пластинами. Увеличение значения d при перемещении подвижной пластины ведет к уменьшению емкости датчика и снижению сопротивления. Этот преобразователь используют для измерения небольших перемещений и величин (усилий, давления и др.).
Наряду с рассмотренными, применяют и различные виды фото- и термоэлектрических, ионизационных и других преобразователей.
К датчикам, используемым в подъемно-транспортных, строительных и дорожных машинах и оборудовании, так же как и ко всем другим элементам и устройствам автоматики и к системе в целом
 Рис.184. Емкостные преобразователи
Рис.184. Емкостные преобразователи
|
предъявляются особые требования, обусловленные тяжелыми условиями эксплуатации машин. Они должны выдерживать обычные для указанных машин вибрационные и ударные перегрузки, падения напряжения в сети и при рабочей нагрузке. Большое значение имеет и относительная влажность, достигающая 98 %, а также температура окружающей среды, которая может изменяться от -60 °С на открытом воздухе до +150 °С в специальных производствах например, в пропарочных камерах. При этом наиболее сильное воздействие может оказать термоудар, как например, при быстром нагреве после запуска охлажденного до -40°С двигателя машин. Это может оказать разрушительное влияние особенно на элементы электроники и соединительные цепи. Одновременно элементы и системы автоматики в целом должны обладать водонепроницаемостью, пыле-, грязе-, влаго- и коррозийной стойкостью, помехоустойчивостью, надежностью, долговечностью и сохранять работоспособность при воздействии паров масел, жидкого топлива и агрессивных примесей выхлопных газов. К основным требованиям следует отнести также необходимые, особенно для передвижных машин, быстродействие и точность, простоту конструкции, минимально возможные размеры и массу, удобство эксплуатации и невысокую стоимость.
Усилители предназначены для увеличения (от вспомогательного источника питания) мощности сигнала на выходе измерительной части системы автоматического управления, так как в большинстве случаев она недостаточна для приведения в действие исполнительных устройств. Назначение и место усилителей в системе автоматического управления обусловливает и предъявляемые к ним требования. Так, для усилителя в измерительной цепи главным параметром является стабильность характеристики, большой частотный диапазон и отсутствие искажения сигнала, а для выходного каскада усиления - КПД и выходная мощность.
Наряду с обычными усилителями в системах автоматического управления используют усилители-преобразователи, осуществляющие преобразование постоянного тока в переменный, и операционные усилители, осуществляющие моделирование различных математических операций (суммирование, дифференцирование, интегрирование и т. д.).
В электрических системах используют электронные, электромагнитные и при больших мощностях электромашинные, а в неэлектрических - механические, пневматические и гидравлические усилители.
Электронные усилители делят на ламповые и полупроводниковые. В связи с тем, что полупроводниковые усилители не требуют энергию и время на подогрев, имеют меньшие габариты, массу, значительный срок службы и обладают достаточно высокой механической прочностью и надежностью, они практически вытеснили электровакуумные лампы. К отличительным особенностям полупроводниковых усилителей следует отнести также экономичность, мгновенную готовность к работе, высокий коэффициент усиления и большой диапазон усиливаемых частот, а также вибро- и ударостойкость. По виду усиливаемого сигнала усилители делятся на усилители тока (переменного и постоянного) и напряжения, а по числу каскадов на одно- и многокаскадные. По принципу действия их классифицируют на усилители дискретного (релейного) и аналогового действия. При этом в последние годы осуществляется интенсивный переход к интегральным схемам. В схемах электронных усилителей могут использоваться различные виды обратных связей (рис.185).
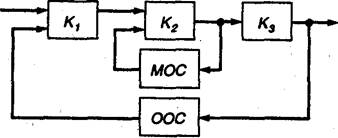 Рис.185. Обратные связи в усилителях
Рис.185. Обратные связи в усилителях
|
При этом цепь обратных связей может охватывать как отдельные каскады (местная обратная связь - МОС), так и все каскады усилителя (общая обратная связь - ООС). Некоторые вещества, такие как германий, кремний к другие, являясь одновременно и проводниками и диэлектриками, называют, полупроводниками, наих основе выпускают транзисторы, тиристоры, диоды и различные интегральные схемы. Полупроводниковые усилители и преобразователи широко используют в силовых датчиках, самопишущих приборах и т.д. В общем случае полупроводниковый усилитель состоит из входного устройства ВУ, многокаскадного усилителя напряжения УН, усилителя мощности УМ, источника питания ИП и цепи обратной связи ОС (рис.186). При этом усилители переменного тока содержат только входной трансформатор Т, а постоянного тока - еще и вибропреобразователь ВП. В процессе работы усилителя входной сигнал напряжения постоянного тока Uвх преобразуется с помощью ВП в пульсирующее напряжение и через трансформатор Т подается в пятикаскадный усилитель напряжения переменного тока УН. Затем усиленные сигналы поступают в усилитель мощности УМ, а из него Uвых направляется в цепь исполнительного органа. Через цепь обратной связи ОС выходной сигнал возвращается на вход третьего каскада усилителя напряжения.
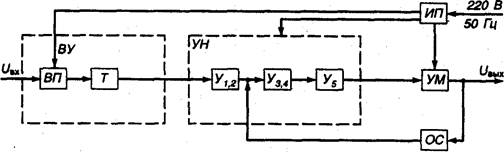 Рис.186. Структурная схема усилителя
Рис.186. Структурная схема усилителя
|
Источник питания ИП состоит из силового трансформатора и двух выпрямителей, один из которых питает усилитель напряжения, а другой - мощности. Отдельная обмотка силового трансформатора обеспечивает питание вибропреобразователя ВП.
В электромагнитных усилителях используется свойство изменения магнитной проницаемости ферромагнитных материалов в зависимости от величины постоянного подмагничивающего поля. Простейшим электромагнитным усилителем (рис.187) является обычный дроссель с подмагничиванием, в котором обмотка управления питается напряжением постоянного тока, а рабочая Wр подключена
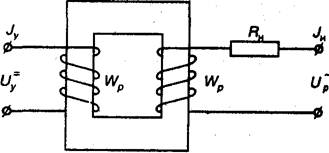 Рис.187. Электромагнитный усилитель
Рис.187. Электромагнитный усилитель
|
последовательно с сопротивлением нагрузки Rн к источнику напряжения переменного тока. Эффект усиления при работе электромагнитного усилителя осуществляется следующим образом. При подаче сигнала управления Uу магнитная индукция сердечника магнитного усилителя увеличивается, а магнитная проницаемость уменьшается. При этом изменяется индуктивность катушки и уменьшается индуктивное сопротивление рабочей катушки, что ведет к возрастанию тока нагрузки Iн.
Электромашинные усилители используют для управления и регулирования частоты вращения в автоматизированных электроприводах постоянного тока. Простейшие усилители представляют собой систему из вспомогательного двигателя и генератора постоянного тока с независимым возбуждением. Управление напряжением генератора осуществляется изменением тока в обмотке возбуждения. При этом выходная величина мощности может в 100 раз превышать входную, затрачиваемую на управление работой усилителя. Электромашинные усилители с поперечным магнитным полем, в котором для возбуждения выходного каскада используется магнитный поток поперечной реакции якоря, получили наиболее широкое распространение. Эти усилители позволяют иметь усиление на выходе до 105 раз.
В качестве переключателей в системах автоматики используют большое количество электромагнитных реле клапанного типа с втяжным или поворотным якорем, работающих как на переменном, так и на постоянном токе.
Пневматические и гидравлические усилители обычно выполняются заодно с исполнительными элементами и рассмотрены далее.








