 2018-03-08
2018-03-08 221
221
| Принцип действия. Электростатический (ЭС) преобразователь представляет собой два или несколько тел, между которыми действует электрическое поле. |
Простейший ЭС преобразователь содержит два электрода площадью S, параллельно расположенных на расстоянии δ в среде с диэлектрической проницаемостью ε (конденсатор переменной емкости). С электрической стороны преобразователь характеризуется напряжением U, зарядом q = CU (где С – емкость (для плоскопараллельного расположения пластин С=εS/δ)), током i=dq/dt, энергией электрического поля Wэл = q U/2 = CU2 2.
Если одна из пластин (или диэлектрик) имеет возможность перемещаться, то с механ-ой стороны преобразователь характеризуется перемещением х, скоростью υ=dx/dt и электростатической силой притяжения между пластинами fэл = dWэл dx.
Емкости большинства преобразователей составляют 10-100 пФ, и поэтому даже на высоких частотах их выходное сопротивление велико (103 - 107 Ом), а выходная мощность настолько мала, что емкостные преобразователи работают только с усилителем с высоким входным сопротивлением и, чтобы избежать наводок, соединяются с ним экранированным проводом или коаксиальным кабелем.
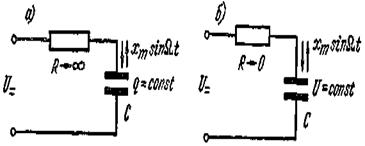
При постоянной емкости ЭС преобразователь работает как мера емкости или как элемент электрической цепи с реактивной проводимостью, пропорциональной частоте: если
и = Um sinωt, то i = ω C U m cosωt (рис. а)
При емкости, принудительно изменяемой по известному закону, например, С = С 0+ ΔCsinΩt, ЭС преобразователь работает в емкостных модуляторах и измерителях поверхностных зарядов (а также в ЭС генераторах) (рис. б). Например, ЭС преобразователь емкостного модулятора («динамический конденсатор») в зависимости от постоянной времени RC- цепи может работать в режиме заданного заряда при  (рис. а) и заданного напряжения при
(рис. а) и заданного напряжения при  (рис. б). В первом случае
(рис. б). В первом случае  ;
;  , т. е. выходной величиной является переменная составляющая напряжения Uc (или UR). Во втором случае
, т. е. выходной величиной является переменная составляющая напряжения Uc (или UR). Во втором случае  ;
;  ;
;  , т.е. выходной величиной модулятора, пропорциональной постоянному напряжению Ux, является ток.
, т.е. выходной величиной модулятора, пропорциональной постоянному напряжению Ux, является ток.
При емкости, изменяющейся в зависимости от измеряемой неэлектрической величины, ЭС преобразователь (емкостной преобразователь) работает в различных датчиках прямого преобраз-ия, а также как преобразователь неравновесия в датчиках уравновешивания. Величина емкости зависит от механ-го перемещения, изменяющего зазор δ или площадь S, температуры и состава диэлектрика, влияющих на ε, и т.д. При этом ЭС преобразователь может работать либо на постоянном токе (в режиме заданного напряжения или заданного заряда), либо на переменном токе (на несущей частоте).
Например, если δ=δ 0 +х, то С=εS /(δ 0 +х), и при работе на постоянном токе в режиме заданного заряда (при условии, что переменная х меняется с такой круговой частотой Ω, что ΩRC >>1), напряжение Uc = q/C = q( δ 0+x)/( ε S) содержит составляющую, пропорциональную х.
При работе в режиме заданного напряжения заряд q =ε SU/( δ+ x). Если х<<δ0, то приближенно  и
и  , т.е. ЭС преобраз-ль может служить д/измерения скорости υ = dx/dt относительного движения.
, т.е. ЭС преобраз-ль может служить д/измерения скорости υ = dx/dt относительного движения.
При работе на несущей частоте ЭС преобразователь питается напряжением U=Umsinωt, круговая частота ω которого должна значительно превышать наибольшую частоту Ω изменения емкости под действием измеряемой величины. Пусть, например, С=С0+ΔCsinωt. Тогда
i=d (CU)/dt=CdU/dt+UdC/dt=Um(ωC0cosωt+ωΔCcosωtsinωt+ΩΔCsinωtcosωt). Первый член в скобках выражает несущее колебание постоянной амплитуды, второй – составляющую тока, меняющуюся пропорционально изменению емкости, однако третий член нарушает эту пропорциональность. Для уменьшения относительного размера третьего члена нужно увеличивать отношение ω / Ω.
При работе ЭС преобразователей на постоянном токе нужно учитывать существующую между электродами контактную разность потенциалов (КРП) ек, включаемую последовательно с емкостью. КРП зависит от природы материалов, свойств и чистоты поверхности и существует даже между электродами, выполненными из одного и того же материала. Так, между электродами, выполненными из алюминия высокой чистоты, КРП может достигать 1В. Лишь применение специальных мер позволяет снизить КРП до величины порядка 10-20 мВ.
Область применения. При емкости, изменяющейся под действием силы электростатического притяжения, ЭС преобразователь работает в измерительных механизмах ЭС вольтметров и в датчиках уравновешивания в качестве обратного преобразователя. При измерении неэлектрических величин (перемещения), сила fэ обычно считается вредным эффектом, поскольку она является реакцией прибора на объект измерения, однако такое воздействие гораздо меньше, чем в других преобразователях, например в индуктивных.
Емкостные преобразователи. Конструкции преобразователей. На рис. а показано устройство емкостного преобразователя для измерения уровня.

| 
| Преобраз-ль состоит из 2 параллельно соединенных конденсаторов: конденсатор С1 образован частью электродов и диэлектриком – жидкостью, уровень которой измеряется, конденсатор С 0 – остальной частью электродов и диэлектриком – воздухом. |
Емкость преобразователя
 ,
,
где l 0 – полная длина цилиндра; l – длина, на которую цилиндр заполнен жидкостью; ε – диэлектрическая проницаемость жидкости; R1 и R2 – радиусы внешнего и внутреннего цилиндров.
На рис. б показан принцип устройства емкостного преобразователя для измерения толщины ленты из диэлектрика. Испытуемая лента 1 протягивается с помощью роликов 2 между обкладками 3 конденсатора. Если длину зазора между обкладками конденсатора обозначить δ, площадь обкладок S, толщину ленты δД и ее диэлектрическую проницаемость εд, то емкость С можно выразить как

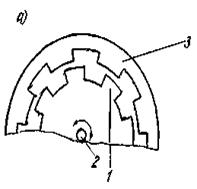  
| На рис. а показан принцип устройства емкостных преобраз-лей с переменной площадью пластин, используемых для измерения угла поворота вала. |
Ротор 1, жестко скрепленный с валом 2, перемещается относительно статора 3 так, что длина зазора между ними сохраняется неизменной. Емкость преобразователя при повороте ротора изменяется от максимума (выступ ротора находится против выступа статора) до минимума, как показано на рис. б. Достоинством емкостных преобразователей с переменной площадью пластин (рис. в)является возможность соответствующим выбором формы подвижной 1 и неподвижной 2 пластин получить заданную функциональную зависимость между изменением емкости и входным угловым или линейным перемещением. Преобразователи с переменной площадью применяются для измерения перемещений, больших 1 мм.

| Д/измерения малых перемещений (10-6 - 10-3 м) получили применение преобразователи с переменным зазором. Обкладка 2 закреплена на пружинах и перемещается поступательно под воздействием измеряемой силы F. Обкладки 1 и З неподвижны. |
Емкость между обкладками 2 и 3 увеличивается, а между обкладками 1 и 2 уменьшается.
Емкостные преобразователи с переменным зазором для измерения малых перемещений отличаются высокой чувствительностью (до 500 В/мм), линейностью зависимости сопротивления от зазора  , малыми погрешностями и простотой конструкции, что в ряде случаев делает их незаменимыми.
, малыми погрешностями и простотой конструкции, что в ряде случаев делает их незаменимыми.
8. Датчики перемещения на основе эффекта Холла

| Эффектом Холла называется появление в проводнике с током плотностью j, помещенном в магнитное поле Н, электрического поля Ех, перпендикулярного Н и j. |
При этом напряжённость электрического поля, называемого ещё полем Холла, равна Ex=RHjsina, где a угол между векторами Н и J (a<180°). Когда H^j, то величина поля Холла Ех максимальна: Ex=RHj. Величина R (коэффициент Холла) является основной характеристикой эффекта Холла.
Простейшая теория эффекта Холла объясняет появление ЭДС Холла взаимодействием носителей тока (электронов проводимости и дырок) с магнитным полем. Под действием эл. поля носители заряда приобретают направленное движение (дрейф), средняя скорость которого (дрейфовая) vдр¹0. Плотность тока в проводнике j=n*evдр, где n – концентрация числа носителей, е – их заряд. При наложении магн. поля на носители действует сила Лоренца: F=e[Hvдp], под действием которой частицы отклоняются в направлении, перпендикулярном vдр и Н. В результате в обеих гранях проводника конечных размеров происходит накопление заряда и возникает электростатическое поле – поле Холла. В свою очередь поле Холла действует на заряды и уравновешивает силу Лоренца. В условиях равновесия eEx=еНvдр, Ex=1/neHj, отсюда R=1/ne (cмз/кулон). Знак R совпадает со знаком носителей тока. Д/металлов, у которых концентрация носителей (электронов проводимости) близка к плотности атомов (n»1022См-3), R~10-3(см3/кулон), у п/п концентрация носителей значительно меньше и R~105 (см3/кулон). Коэффициент Холла R может быть выражен ч/ез подвижность носителей заряда m=еt/m* и удельную электропроводность s=j/E=еnvлр/Е: R=m/s.
Здесь m* - эффективная масса носителей, t - среднее время между двумя последовательными соударениями с рассеивающими центрами.
В ферромагнетиках на электроны проводимости действует не только внешнее, но и внутреннее магн. поле: В=Н+4pМ. Это приводит к особому ферромагнитному эффекту Холла. Экспериментально обнаружено, Ex=(RB+RаM)j, где R – обыкновенный, a Ra – необыкновенный (аномальный) коэф. Холла. Между Ra и удельным электросопротивлением ферромагнетиков установлена корреляция.
Эффект Холла иногда позволяет опред-ть тип носителей заряда в met или п/п, что делает его незаменимым методом исследования св-в п/пв.
На основе эффекта Холла работают датчики Холла: приборы, измеряющие напряжённость магнитного поля. Они особенно полезны для измерения малых токов. Эффект Холла датчики используются также для выявления обнаружения жидкости в трубах, и они используются в электронных компасах для расчета подшипников относительно магнитного поля Земли.

| Примером использования эффекта Холла является ползунковый датчик. Ползунковый датчик состоит из системы магнита и датчика Холла с цифровым выходом, как это показано на рис. Эффект Холла заключается в возникновении разности потенциалов на боковых гранях п/п пластины, вдоль которой проходит электрический ток и которая помещена в магнитное поле. |
Магнитное поле с индукцией В перпендикулярно плоскости пластинки и направлению тока I.

| Преобраз-ль Холла: 1, 2 – токовые электроды; 3, 4 – измерительные электроды; Iуп – управляющий ток; VН – напряжение Холла. В общем виде выражение для напряжения Холла |
 ,
,
где RН – постоянная Холла; d – толщина элемента; Iуп – ток управления;
B – ндукция воздействующего магнитного поля.
Причина появления напряжения Холла в том, что в магнитном поле носители зарядов под действием сил Лоренца изменяют свою траекторию, вследствие чего на одной из боковых граней концентрация зарядов увеличивается, в то время как на противоположной грани – уменьшается.
Существуют два типа датчиков Холла: линейный и пороговый (рис. 1). Линейный датчик обычно интегрируется вместе с усилителем для упрощения согласования с последующими схемами. Они работают в большем диапазоне напряжений и обладают более хорошей помехозащищенностью. Но эти датчики не отличаются хорошей линейностью зависимости выходного напряжения от плотности магнитного поля (рис. 2А), поэтому для получения точных результатов необходимо проводить их индивидуальную калибровку. В дополнение к усилителю в состав порогового датчика входит триггер Шмитта, обладающий гистерезисом. На рисунке 2Б показана зависимость выходного сигнала порогового датчика от плотности магнитного поля. Как видно из рисунка, такой датчик обладает гистерезисом. Когда плотность приложенного магнитного поля превышает заданный пороговый уровень, триггер переключается из состояния ВЫКЛЮЧЕНО в положение ВКЛЮЧЕНО, что свидетельствует о критическом приближении объекта к детектору. Гистерезис за счет введения мертвой зоны, запрещающей работу датчика после прохождения порогового значения, устраняет паразитные колебания. Датчики Холла обычно изготавливаются в виде интегральных схем на кремниевых подложках в бескорпусном или корпусном исполнении.
| Рисунок 1 – Схемы линейного (А) и порогового (Б) датчика Холла | 
|
| Рисунок 2 – Соответствующие передаточные функции датчика Холла | 
|
Для измерения перемещения объектов датчику Холла необходим источник магнитного поля, а также интерфейсная схема. Магнитное поле характеризуется двумя основными параметрами: плотностью потока и полярностью (направленностью). Следует отметить, что для повышения чувствительности желательно, чтобы линии магнитного поля были перпендикулярны плоской поверхности датчика и имели заданную направленность. Перед разработкой датчика перемещений на основе детектора Холла необходимо провести полный предварительный анализ. Начинать необходимо с оценки силы магнитного поля. С увеличением расстояния от поверхности полюсов сила поля уменьшается. Силу поля можно определить либо при помощи измерителя магнитной индукции или калиброванного датчика Холла.
Для детектирования линейных и круговых перемещений четыре датчика Холла включаются в мостовую схему.
Измерение механических перемещений и вибраций. Если датчик Холла механически перемещается в неоднородном магнитном поле, то напряжение Холла будет зависеть от величины смещения.
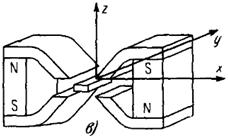
Магнитопроводы холловских преобразователей механических перемещений и колебаний.
|
На рис. (а, б, в) представлены три магнитные схемы, в которых датчик Холла перемещается в направлении х: в первой схеме он выдвигается из зазора магнита (рис. а), во второй – перемещается в зазоре м/д ферритовыми магнитами, установленными одноименными полюсами друг к другу (рис. б), в третьей – выдвигается из–под полюса S к полюсу N магнитной схемы или наоборот (рис. в).

| Зависимость напряжения Холла от механического перемещения для устройств, изображенных на рис.(а, б, в).
Чувствительность по напряжению в преобразователе:

|
где γ1 – чувствительность самого датчика Холла (выраженная в вольтах на гаусс), γ2 – градиент магнитного поля, в котором перемещается датчик Холла (выраженная в гауссах на 1 мм).
Чувствительность порядка 1 в/мм, а также наличие напряжения в цепи Холла порядка нескольких милливольт уже дают возможность производить непосредственные измерения с помощью прибора, так что зачастую применения усилителя не требуется. Большую величину напряжения с преобразователя можно получить, используя несколько датчиков Холла. Чувствительность преобразователя на основе датчика Холла зависит также от расстояния между магнитными системами.
9. Емкостные датчики положения, перемещения и уровня
Емкость плоского конденсатора обратно пропорциональна расстоянию между пластинами:  , где А – площадь поверхности обкладки конденсатора; d – расстояние между обкладками; A/d – геометрический фактор конденсатора с параллельными пластинами.
, где А – площадь поверхности обкладки конденсатора; d – расстояние между обкладками; A/d – геометрический фактор конденсатора с параллельными пластинами.
Принцип действия емкостных датчиков основывается либо на изменении геометрии конденсатора (т.е. на изменении расстояния между пластинами), либо на изменении емкости за счет размещения между пластинами различных материалов: электропроводных или диэлектрических. Изменения емкости, как правило, преобразуются в переменный электрический сигнал. Емкостные датчики могут быть однополярными (в их состав входит только один конденсатор), дифференциальными (в их состав входят два конденсатора) или мостовыми (здесь уже используются 4 конденсатора). В случае дифференциальных или мостовых датчиков, один или два конденсатора являются либо постоянными, либо переменными, включенными навстречу друг другу.

| На рис. (А) рассматриваются 3 пластины одинаковой площади. Эти пластины формируют 2 конденсатора С 1 и Сг. На две крайние пластины подаются sin-ые сигналы одинаковой амплитуды, но с разностью фаз, равной 180°. Поскольку оба конденсатора являются одинаковыми, токи через них взаимно уничтожают друг друга, и потенциал центральной пластины практически равен нулю. |
На рис. (Б) центральная пластина сместилась вниз на расстояние х. Это приведет к изменению емкостей С1 и С2:  ,
,  . При этом амплитуда сигнала на центральной пластине будет пропорциональна величине перемещения х,а фаза – направлению движения. Амплитуду выходного сигнала можно найти из выражения
. При этом амплитуда сигнала на центральной пластине будет пропорциональна величине перемещения х,а фаза – направлению движения. Амплитуду выходного сигнала можно найти из выражения  .
.
При выполнении условия х<<х0, выходное напряжение практически линейно зависит от перемещения. Второй член суммы соответствует исходному рассогласованию двух конденсаторов и является основной причиной возникновения напряжения смещения выходного сигнала. Краевые эффекты на концах пластин и действие электростатических сил также относятся к причинам появления напряжения смещения. В результате действия силы притяжения или отталкивания между двумя заряженными пластинами, они ведут себя как пружины.
Конструктивные схемы емкостных преобразователей выполняются различных вариантах в зависимости от области применения.



Рис. Схемы устройства емкостных преобразователей
При измерении уровней жидких и сыпучих тел находят применение цилиндрические или плоские конденсаторы (а), емкость которых характеризуется уровнем х и зависит от диэлектрических проницаемостей жидкости ε1, изоляции ε1 и воздуха ε3.
Для измерения толщины х ленты 3 из диэлектрика с ε x (б) ее протягивают между электродами 1 и 2, расстояние межу которыми δ.
Для измерения малых перемещений (до единиц мкм), а также точного измерения быстроменяющихся сил и давлений применяются дифференциальные емкостные преобразователи с переменным зазором (в). Средний электрод конденсатора укреплен на упругом элементе (мембране, упругой пластинке, растяжках) между неподвижными электродами 1 и 2.
На рис. г и д показаны схемы устройства емкостных преобразователей с переменной площадью. В схеме на г диэлектрик 1 перемещается по стрелке, а в схеме на рис. д один из электродов 2 жестко связан с валом и совершает угловые перемещения относительно неподвижного электрода 1.
10. Емкостные и резистивные датчики влажности
Конденсаторы с воздушным зазором могут исп-ся как датчики относительной влажности, поскольку от кол-ва водяных паров в атмосфере зависит диэлектрическая проницаемость воздуха. Пространство м/д пластинами конденсатора м.б. заполнено не воздухом, а соотв-им диэлектрическим материалом, проницаемость которого сильно зависит от влажности окружающей среды.

| На рис. показана схема емкостной системы измерений, где изменение диэл-кой проницаемости образца приводит к измен-ию частоты генератора. |
Образец исслед-го мат-ла помещается м/д двумя пластинами, формирующими конд-ор, подсоед-ый к LC - контуру. Счетчик измеряет частоту, по которой опред-ся в-на влажности. Этот метод имеет ряд ограничений: он весьма неточен при влажности ниже 0,5%; образец д.б. очищен от посторонних частиц с относительно высокой диэл-ой проницаемостью (от металла, пластика), геометрия образца не должна меняться во время проведения эксперимента.

| Резистивные датчики. Сопротивление многих неметаллических проводников, в основном, зависит от содержания в них воды. На этом принципе реализуются резистивные датчики влажности или гигристоры (рис.). |
В нем исп-ся мат-ал, обладающий сравнительно низким удельным сопротивлением, которое зависит от влажности окружающей среды. Слой такого мат-ла довольно большой площади наносится сверху двух гребенчатых электродов. Когда он поглощает молекулы воды, сопротивление м/д электродами меняется, что регистрируется при помощи электронной схемы.

| На рис. показан твердотельный датчик влажности, реализованный на Si подложке, обладающей высокой электропроводностью, чтобы пропускать ч/з себя ток от Al электрода, нанесенного на ее пов-ти методом вакуумного осаждения металлов. |
На электрод наносится слой из оксида алюминия, сверху которого формируется второй электрод из пористого золота, не мешающего прохождению газов, но обеспечивающего хороший электрический контакт. Слой алюминия подвергается специальной обработке для получения пористой оксидной поверхности. Среднее поперечное сечение пор должно быть достаточным для прохода через них молекул воды. Электрические выводы формируются в кремниевой подложке и слое золота. Оксид алюминия при контакте со смесью газов, содержащей водяные пары, поглощает воду. Количество поглощенных молекул воды пропорционально парциальному давлению водяных паров и обратно пропорционально абсолютной температуре.
11. Емкостные, пьезорезистивные и пьезоэлектрические акселерометры
Акселерометры – устройства с одной степенью свободы, в состав которых входят: инерционная масса,движение которой отстает от движения корпуса, и, его основная цель заключается в детектировании перемещения этой массы относительно корпуса устройства и преобразовании его в пропорциональный электрический сигнал, поэтому другой составной частью всех акселерометров является детектор перемещений, способный измерять микроскопические амплитуды вибрационных колебаний или линейных ускорений. Также в состав акселерометра входят упругая поддерживающая система (пружина) и рама, обладающая демпфирующими свойствами.
Правильно рассчитанный, изготовленный и откалиброванный акселерометр должен иметь одну резонансную (собственную) частоту и плоскую частотную характеристику, обеспечивающую получение точных измерений. В пределах плоской зоны датчик корректно реагирует на изменения входного сигнала. Для расширения динамического диапазона акселерометра, ограниченного резонансной частотой, применяют вязкое демпфирование. В качестве демпфирующей среды чаще всего используется силиконовая смазка.
Емкостной датчик ускорений состоит из двух пластин: стационарной, часто соединенной с корпусом, и свободно перемещающейся внутри корпуса, к которой подсоединена инерционная масса. Эти пластины формируют конденсатор, величина емкости которого зависит от расстояния между ними, а значит и от ускорения движения, испытываемого датчиком. Максимальное перемещение, определяемое емкостным акселерометром, редко превышает 20 мкм. Следовательно, в таких датчиках всегда необходимо компенсировать дрейф различных параметров, а также подавлять всевозможные помехи. Поэтому обычно акселерометры имеют дифференциальную структуру, для чего в их состав вводится дополнительный конденсатор, емкость которого д.б. близка к емкости основного конденсатора. При этом напряжения на конденсаторы подаются со сдвигом фаз 180°. Тогда величина ускорения датчика будет пропорциональна разности значений емкостей конденсаторов.
На рис. 2А показано поперечное сечение емкостного дифференциального акселерометра, в котором инерционная масса расположена м/д верхней крышкой и основанием. Масса поддерживается четырьмя кремниевыми пружинами (рис. Б). Верхняя крышка и основание отделены от массы расстояниями d1 и d2. Все три элемента изготовлены методами микротехнологий на одной кремниевой подложке.


Рис. Емкостной акселерометр с дифференциальным конденсатором
Площадь пластины конденсатора Сmc, образованного массой и верхним электродом, равна S1, а площадь пластины второго конденсатора Сmb, образованного массой и основанием – S. При движении массы по направлению к верхнему электроду расстояние d1, уменьшается на ∆, а расстояние d2 увеличивается на ту же самую величину. Значение ∆ равно механической силе Fm, действующей на массу, деленной на коэффициент упругости k кремниевой пружины: Δ=Fm/k.
Эквивалентная схема акселерометра справедлива только тогда, когда на положение массы не влияют электростатические силы (т.е. когда емкость конденсаторов линейно зависит от Fm).
Вых. сигнал акселерометра зависит от температуры и рассогласования значений конденсаторов. Рекомендуется проводить калибровку таких датчиков во всем температурном диапазоне и осуществлять соответствующую коррекцию выходного сигнала во время измерений. Другой эффективный способ повышения стабильности устройства – разработка системы самокалибровки, позволяющей компенсировать влияние электростатических сил, возникающих, когда-либо на верхнюю крышку, либо на основание подается высокое напряжение.
Чувствительным элементом пьезорезистивных акселерометров является тензодатчик, измеряющий деформацию пружин, поддерживающих инерционную массу. Эта деформация пропорциональна величине и скорости перемещения массы, а значит и ускорению. Такие устройства могут измерять ускорения в широком частотном диапазоне: 0...13 кГц. Они обладают индивидуальными температурными характеристиками, страдают от высокой температурной зависимости выходного напряжения, что требует тщательного подбора параметров составных элементов каждого датчика. Эта проблема решается при интегральном изготовлении таких датчиков методами микротехнологий.
На рис. показан твердотельный акселерометр, обладающей широким динамическим диапазоном. Микродатчик состоит из трех слоев кремния. Внутренний слой включает в себя инерционную массу и упругую подвесную конструкцию. Масса крепится внутри рамки, сформированной методом травления, на подвесе, с двух сторон которого расположены тензодатчики, детектирующие движение массы. Внешние два слоя – крышка и основание – защищают подвижные части от внешних загрязнений. В обоих внешних слоях сделаны углубления, позволяющие инерционной массе свободно перемещаться.

| Рис. Ус-во пьезорезистивного акселерометра У этого датчика есть несколько особенностей. Одна из них закл-ся в том, что чувствительная ось датчика лежит в плоскости подложки, тогда как в большинстве конструкций аналогичных датчиков она перпендикулярна подложке. Когда ускорение действует на чувствительную ось, инерционная масса поворачивается вокруг подвеса. При этом один из тензодатчиков испытывает сжатие, а второй – растяжение. Поскольку тензодатчики имеют небольшую длину, даже маленькие перемещения вызывают большие изменения сопротивления. |
Пьезоэлектрические акселерометры.
Пьезоэлектрический эффект часто лежит в основе датчиков вибраций и ускорений. Этот эффект заключается в прямом преобразовании механической энергии в электрическую в материалах, имеющих кристаллическую структуру, включающую в себя электрические диполи. Эти датчики работают в частотном диапазоне менее 2 Гц....5кГц. Они также обладают хорошим подавлением внеосевых шумов, высокой линейностью и широким температурным диапазоном (до 120°С).

| Кристалл располагается между кожухом и инерционной массой. Ускорение, действующее на датчик, приводит к разности перемещений кожуха и инерционной массы, в результате чего появляется сила, действующая на кристалл. Выходной сигнал акселерометра прямо пропорционален ускорению или уровню вибраций. |
Д/улучшения частотных хар-ик пьезоэлектрический сигнал усиливается при помощи преобразователей заряд-напряжение или ток-напряжение, встроенных в один и тот же корпус с пьезоэл-им кристаллом.
12. Тепловые расходомеры
На рис. А показан термоанемометр, состоящий из трех небольших трубочек, внесенных в поток жидкой среды. Две трубочки оснащены детекторами температуры: Ro и Rs, которые контактируют с потоком, но изолированы от структурных элементов и трубки, в которой определяется скорость потока.

Между двумя детекторами расположен нагревательный элемент. Оба детектора для уменьшения тепловых потерь соединены с электрическими проводами при помощи капли проводящего материала (рис. Б). Принцип действия датчика заключается в следующем. Первый детектор Roизмеряет исходную температуру в потоке. Нагревательный элемент повышает температуру жидкости, которую измеряет второй детектор Rs. При отсутствии течения тепло от нагревателя за счет теплопроводности жидкости и гравитационной конвекции будет зарегистрировано обоими детекторами, но поскольку второй детектор расположен ближе к нагревателю, температура, измеренная им, будет несколько выше, чем температура на первом датчике. При движении потока скорость распространения тепла возрастает за счет вынужденной конвекции. Чем больше скорость потока, тем выше тепловые потери и тем ниже температура, регистрируемая детектором Rs.Скорость потока определяется по измеренным потерям тепла, т.е. для определения скорости потока необходимо измерить градиент температуры между датчиком и подвижной средой и количество выделяемого тепла.
На рис. 11.5А показана нелинейная зависимость скорости потока жидкой среды от тепловых потерь.
Для поддержания на детекторе Rsпостоянной температуры T и получения достаточно большого градиента температур, необходимо компенсировать тепловые потери. Для этого к нагревательному элементу надо подводить соответствующую энергию. Также существуют анемометры, в которых нет отдельного нагревательного элемента. В таких датчиках детектор Rsработает в режиме саморазогрева; это означает, что электрический ток, проходя ч/з сопротивление детектора, выделяет достаточное количество тепла д/повышения его температуры до значения T. Именно при этой температуре второй детектор имеет сопротивление Rs.

Д/проведения точных температурных измерений можно использовать любой тип температурных детекторов: резистивных, полупроводниковых, оптических и т.д. Однако большинство изготовителей датчиков применяют резистивные датчики, поскольку они обладают хорошей линейностью, воспроизводимостью и долговременной стабильностью в широком температурном диапазоне. Следует отметить, что тепловые расходомеры могут работать только с ламинарными потоками при отсутствии каких-либо завихрений. Поэтому в состав термоанемометров часто входят гасители завихрений или сетки, иногда называемые выравнивателями массы (рис. А). Тепловые расходомеры по сравнению с остальными типами аналогичных измерителей обладают высокой чувствительностью и широким динамическим диапазоном. Они могут использоваться для измерения очень маленьких перемещений жидкостей и газов, а также высоких скоростей потоков. Основными достоинствами таких датчиков являются отсутствие подвижных компонентов и возможность измерения низких расходов. Тепловые расходомеры незаменимы в случаях, когда требуется применение микродатчиков, где невозможно использовать устройства с подвижными компонентами, например, в автомобилях, в медицине и биологии.
13. Ультразвуковые расходомеры
Характеристики потоков могут быть определены при помощи ультразвуковых волн. Основная идея заключается в детектировании изменения частоты или сдвига фаз, вызываемых подвижной средой. Ультразвуковые датчики реализуются на основе либо эффекта Доплера (при движении объекта от приемника со скоростью v, частота отраженного сигнала уменьшается, а при приближении объекта – возрастает), либо определения изменений эффективной скорости ультразвука в среде. Эффективная скорость звука в подвижной среде равна скорости звука в этой среде плюс скорость среды относительно источника звука. Т.о., распространение звуковой волны против потока среды приведет к уменьшению эффективной скорости звука, а вдоль потока – к увеличению. Разность между этими двумя эффективными скоростями звука равна удвоенной скорости потока среды. Поэтому ультразвуковые датчики для определения скорости потока измеряют скорость звука вдоль и против течения. На рис. 11.7А показаны два ультразвуковых генератора, расположенные на двух противоположных сторонах трубы, по которой течет поток жидкой среды. В качестве ультразвуковых генераторов, как правило, используются пьезоэлектрические кристаллы. Каждый кристалл может использоваться либо для возбуждения ультразвуковых волн, либо для их приема.

Кристаллы расположены на расстоянии D друг от друга под углом β по отношению к направлению потока. Также возможно располагать небольшие кристаллы прямо внутри трубы строго по направлению потока. Время распространения звука между двумя кристаллами А и В связано со средней скоростью потока vc следующим соотношением:

где с – скорость звука в среде. Знак ± означает направление распространения звука вдоль потока или против него. Скорость vc – скорость потока, усредненная вдоль пути распространения ультразвука. Из уравнения легко найти vc. Для улучшения отношения сигнал/шум время распространения ультразвукового сигнала часто измеряется в двух направлениях, при этом оба пьезокристалла работают попеременно то приемниками, то передатчиками. Принятый ВЧ сигнал отстает от переданного на время Т. Величина этой задержки зависит от скорости потока среды. Время Т измеряется при помощи времяпролетного детектора, а синхронный детектор используется для определения разницы времен ΔT, затраченных на распространение сигнала вдоль и против течения потока. Такой ультразвуковой датчик обладает достаточно высокой точностью, его дрейф нуля составляет 5*10-3 м/с2 в течение 4-х часового интервала времени.
Альтернативный способ измерения расхода при помощи ультразвуковых датчиков заключается в определении разности фаз между переданным и принятым импульсным сигналом. Чем выше частота, тем лучше чувствительность датчика. Однако при повышении частоты усиливается ослабление звука в системе, что может привести к снижению отношения сигнал/шум. В доплеровских расходомерах используется непрерывное излучение ультразвуковых волн. В них происходит сложение частот излученного и принятого сигналов. Для этого в схему включен нелинейный элемент – смеситель. Частота выходного сигнала определяется выражением:

где fs, fr – частоты излучающего и принимающего кристаллов, а знак ± относится к разным направлениям потока. Из выражения видно, что разность частот прямо пропорциональна скорости потока.
Достоинство ультразвукового датчика заключается в его способности измерять поток без прямого контакта с жидкостью.
14. Использование поверхностного натяжения в ПИП

| Поверхностное натяжение – стремление вещества (жидкости, твердой фазы) уменьшить избыток своей потенциальной энергии на границе раздела с др. фазой (поверхностную энергию). |
Определяется как работа, затрачиваемая на создание единицы площади поверхности раздела фаз (размерность Дж/м2). Согласно другому определению, поверхностное натяжение – сила, отнесенная к единице длины контура, ограничивающего пов-ть раздела фаз (Н/м); эта сила действует тангенциально к пове-ти и препятствует ее самопроизвольному увеличению. Поскольку система стремится сократить запас поверхностной энергии, то тело пытается уменьшить площадь поверхности. Капля жидкости принимает сферическую форму, т.к. сфера имеет наименьшее отношение площади поверхности к объему. Поэтому поверхность находится в растянутом состоянии, и если из нее выделить элемент, то действие оставшейся части на элемент можно заменить равнораспределенными по контуру силами натяжения. Мерой избыточной поверхностной энергии является коэффициент поверхностного натяжения σ, равный избыточной энергии в расчете на единицу площади поверхности или силе натяжения, действующей на единицу длины контура элемента поверхности: σ=F/l, σ – величина, равная отношению модуля силы F поверхностного натяжения, действующий на границу поверхностного слоя длиннойl, к этой длине.
На рис. показаны силы натяжения на границах раздела фаз: σ12 –твердое тело – жидкость; σ23 – жидкость-газ; σ13 – твердое тело – газ. Поскольку система находится в равновесии, сумма сил равна нулю, а краевой угол смачивания в контакте жидкости с поверхностью твердого тела: cosθ=(σ12- σ13)/ σ23.
Поверхностное натяжение зависит от темп-ры. Д/многих однокомпо-нентных жидкостей (вода, расплавы солей, жидкие металлы) вдали от критической темп-ры выполняется линейная зависимость σ=σ0-α(Т-Т0),где σ σ0 – поверхностное натяжение при температурах Т и Т0 соответственно, α≈0,1 мН/(м·К) – температурный коэф. поверхностного натяжения.
Поверхностное натяжение явл-ся определяющим фактором многих технологических процессов: пропитки пористых материалов, нанесения покрытий, пайки и др. Велика роль поверхностного натяжения в процессах, происходящих в невесомости. Прибор д/измер-ия поверхностного натяжения называется тензиометр. Принцип действия тензиометра заключается в измерении силы отрыва проволочного кольца из платиноиридиевого сплава от поверхности раздела жидкость-воздух.

| Капиллярный эффект – физ-кое явление, заключающееся в способности жидкостей изменять уровень в трубках, узких каналах произвольной формы, пористых телах. Поднятие жидкости происходит в случаях смачивания каналов жидкостями (воды в стеклянных трубках, песке, грунте и т.п.). |
Понижение жидкости происходит в трубках и каналах, не смачиваемых жидкостью, например ртуть в стеклянной трубке.
За счет сил натяжения, жидкость в капиллярах образует мениски, под которыми возникает давление, рассчитываемое по формуле Лапласа, направленное к центру кривизны:

где Dp – капиллярное давление, p1и p2 – давления в жидкости 1 и соседней фазе 2 (газе, жидкости), r0 – ср. радиус кривизны поверхности.
Под действием этого давления наблюдается капиллярный эффект, заключающийся в подъеме либо опускании уровня жидкости в капилляре на высоту:
где h– высота подъема/опускания жидкости, s - в-на поверхностного натяжения, q – краевой угол смачивания/несмачивания, r - плотность жидкости, g – ускорение свободного падения,r – радиус капилляра.
Электрокапиллярный эффект – зависимость поверхностного натяжения на границе раздела твердых и жидких электродов с растворами электролитов или расплавами ионных соединений от электрического потенциала. Эта зависимость обусловлена образованием двойного электрического слоя на границе раздела фаз. Изменением потенциала можно осуществить инверсию смачивания – переход от не смачивания к смачиванию и наоборот. Электрокапиллярный эффект можно считать "жидким" аналогом пьезоэлектричества (явления, заключающегося в том, что механ-ая деформация некоторых кристаллов приводит к возникновению разности потенциалов и наоборот). Электрокапиллярные явления отражают связь м/д обратимой работой образования пов-ти и разностью Эл. потенциалов на границе фаз.
Применение. На границе раздела двух проводящих жидкостей (ртути и серной кислоты) возникает двойной электрический слой, который влияет на коэф. поверхностного натяжения границы раздела этих жидкостей. Прикладывая дополнительную разность потенциалов, можно изменять заряд, возникающий на границе раздела, а значит, и влиять на само поверхностное натяжение. Если теперь обе эти жидкости поместить в капилляр, то высота столбика более тяжелой жидкости будет зависеть от приложенной разности потенциалов. Другими словами, мы получим готовый прибор: капиллярный вольтметр.

| В таком виде электрокапиллярный эффект исп-ся и сейчас. На его основе работает электрокапиллярный модулятор, устройство, изменяющее количество отраженного света под действием напряжения. |
Устройство состоит из двух связанных отсеков, в которых находится капля ртути. Прикладывая напряжение, можно "перегонять" каплю из одного отсека в другой, изменяя тем самым диаметр ртутного зеркальца в верхнем отсеке и, следовательно, кол-во отраженного света. Предполагается, что такое ус-во найдет применение в оптоэлектронике.
Недавно была разработана и др. схема исп-ия электрокапиллярности. В работе описана схема установки, в которой микротечения жидкости возникают из-за двойного электрического слоя на границе жидкость-твердое тело (а не жидкость-жидкость).

| Принципиальная схема установки показана на рис. В стенках капилляра, в котором находится электролит, вмонтированы электроды. |
Когда между электродами и проводящей жидкостью создается разность потенциалов, на электродах и на стенках капилляра возникает поверхностный заряд. Заряды притягиваются друг к другу, что приводит к усилению взаимодействия жидкости со стенками, т.е. к эффективному усилению смачиваемости. Как следствие, изменяется высота столбика жидкости в капилляре. Изменение высоты столбика будет квадратично зависеть от приложенного напряжения. В самом деле, дополнительная сила взаимодействия со стенками пропорциональна квадрату наведенного заряда, а заряд в свою очередь прямо пропорционален напряжению (зазор м/д жидкостью и электродом играет роль конденсатора). Д/ориентировки, некоторые числа: в капилляре диаметром 0,35 мм напряжение в 100 В приводило к поднятию столбика жидкости примерно на 1 см. Жидкость поднималась достаточно быстро (~ 0,1 с).
15. ПИП на электрооптических эффектах Керра и Поккельса

| Суть эффекта Керра заключается в возникновении оптической анизотропии под действием внешнего электрического поля в изотропном веществе. |
Для наблюдения эффекта Керра оптически-прозрачное изотропное диэлектрическое вещество помещают между обкладками плоского конденсатора, к которому прикладывают напряжение U, создающее в модулирующей среде достаточно сильное электрическое поле ξ. Эта система представляет собой ячейку Керра. Данная ячейка помещается м/д скрещенными пластинами кристалла, являющимися поляризатором и анализатором соответственно. При U=0 интенсивность световой волны на выходе устройства равна нулю. При U≠0 модулирующая среда становится подобной двулучепреломляющему кристаллу с оптической осью, параллельной направлению приложенного внешнего эл-го поля. Поэтому, пройдя сквозь ячейку Керра, световая волна распадается на две линейно поляризованные ортогональные составляющие. Одна из них поляризована так, что ее эл-ий вектор E ориентирован перпендикулярно внешнему полю ξ (обыкновенная волна), а другая – параллельным ξ (необыкновенная волна). В результате, пройдя через ячейку Керра, свет оказывается эллиптически-поляризованным и в большей или меньшей степени проходит через кристалл-анализатор (т.е. возможно управлять амплитудой световой волны при помощи приложенного поля ξ).
Формула, описывающая эффект.  , где n0 и nе – показатели преломления обыкновенной и необыкновенной волны, kk – коэффициент, не зависящий от величины приложенного поля Е.
, где n0 и nе – показатели преломления обыкновенной и необыкновенной волны, kk – коэффициент, не зависящий от величины приложенного поля Е.
Применение эффекта. На основе эффекта Керра и эффекта Поккельса разрабатываются оптические модуляторы, дефлекторы, многоэлементные фотоприемники.
ПИП на электрооптическом эффекте Поккельса. Электрические явления наблюдаются не только в изотропных веществах, но и в кристаллах, обладающих естественной оптической анизотропией. Чтобы двойное лучепреломление не проявлялось при ξ=0, одноосный кристалл вырезают так, чтобы образовывались грани, перпендикулярные его оптической оси, а свет направляют вдоль нее. Если управляющее электрическое поле прикладывают в направлении перпендикулярном направлению распространения света (так же, как в ячейке Керра), то явление называется поперечным эффектом Поккельса (рис.1). Возможно так же модулирующее устройство, в котором световая волна распространяется вдоль направления приложенного поля ξ. Для этого на соответствующие грани анизотропного кристалла наносят прозрачные электроды. В такой структуре возникает продольный эффект Поккельса (рис. 2). Изменение двойного лучепреломления анизотропного кристалла, помещенного в электрическое поле, называют эффектом Поккельса.

| Рис. 1 Поперечный эффекта Поккельса |
| Рис.2 Продольный эффект Поккельса |
Формула, описывающая эффект.
 , где
, где  - электрооптический коэффициент.
- электрооптический коэффициент.
Применение эффекта. На основе эффекта Керра и эффекта Поккельса разрабатываются оптические модуляторы, дефлекторы, многоэлементные фотоприемники.
16. Эффекты Джозефсона и их использование в ПИП
Эффект Джозефсона возникает между двумя сверхпроводниками, образующими туннельный контакт. Если два проводника (в обычном состоянии) разделены окисной пленкой толщиной порядка 10-7 см, то из-за туннельного эффекта электроны переходят из одного проводника в другой и между ними устанавливается электрическое равновесие ( =0). Если же к проводникам приложить извне разность потенциалов, то через туннельный контакт будет протекать электрический ток.
=0). Если же к проводникам приложить извне разность потенциалов, то через туннельный контакт будет протекать электрический ток.
| Стационарный эффект Джозефсона. Данный эффект состоит в том, что достаточно слабый ток I (меньший критического тока слабой связи Ic) протекает без сопротивления, т.е. на ней не происходит падения напряжения. Джозефсон получил следующее выражение для тока I:
 , ,
|
где - разность фаз волновых функций по разные стороны слабой связи.

| Нестационарный эффект Джозефсона. Возникает в случае, когда к джозефсоновскому контакту прикладывается постоянное напряжение U. При этом через контакт будет протекать переменный ток

|
где I0 и φ0 – постоянные величины, характеризующие амплитуду силы постоянного электрического тока и начальную фазу соответственно;
Джозефсоновский контакт, на котором поддерживается постоянная разность потенциалов, испускаемая электромагнитное излучение с частотой ω:

где ω = 2πf – круговая частота.
Нестандартный эффект Джезефсона обратим: если джозефсоновский контакт облучать э/м полем с частотой ω, то на контакте напряжение будет ступенчатым образом изменяться в зависимости от частоты внешнего электромагнитного поля с зависимостью

где f – частота электромагнитного поля.
Применение. Используется в установках д/восстановления единицы напряжения, в сверхпроводящих интерферометрах СКВИДах, содержащих два параллельных контакта Джозефсона. Возможен, конечно, и обратный процесс – джозефсоновское поглощение. Таким образом, джозефсоновский контакт можно использовать как генератор электромагнитных волн или как приёмник.
Первым промышленным применением сверхпроводимости было создание сверхпроводящих магнитов с высокими критическими полями. Следующее практическое применение сверхпроводимости относится к технике чувствительных электронных приборов.

| Магнитометр на СКВИДах. Рассмотрим устройство магнитометра - прибор на основе джозевсоновских переходов, применяющийся для измерения магнитного поля и градиента магнитного поля. В магнитометрах используются СКВИДы 2х типов: на постоянном и переменном токе. |
Если к такому СКВИДу приложить магнитное поле, то оно будет наводить в кольце циркулирующий сверхпроводящий ток. Он будет вычитаться из постоянного тока I в А и складываться в В. Тогда максимальный ток кольца зависит от магнитного потока Ф и равен: 
где Ic – ток кольца, Ф0 – квант потока, Ф – захваченный поток.

| Техническая реализация: СКВИД на постоянном токе с 2-мя тунельными переходами. Контур СКВИДа образован цилиндрической пленкой из свинца (Pb)нанесенной на кварцевый цилиндр длинной 18 мм с наружным диаметром 8мм, а внутренним 6мм. Описанная здесь конструкция является датчиком включенным в эл. схему, обеспечивающую измерение и индикацию отклика датчика на изменение внешнего магнитного поля. |
17. ПИП на тензорезистивном и пьезорезистивном эффектах
Тензорезистивный эффект – изменение сопротивления (проводимости σ) кристаллов под действием всестороннего сжатия (растяжения) или одноосной деформации. Механическое напряжение приводит к изменению геометрии проводника и его сопротивлению.
Основная формула.


| Описание эффекта. На рис. показан цилиндрический проводник, растянутый при помощи силы F. Объем провода v остается постоянным, тогда как его длина увеличивается, а площадь поперечного сечения уменьшается.
В результате имеем уравнение: 
|
где S – площадь поперечного сечения проводника; Е – модуль Юнга материала, F – приложенная сила. В этом уравнении отношение dl/l=e называется относительной деформацией материала.
После дифференцирования получим выражение для определения чувствительности сопротивления к удлинению провода: 
Из этого выражения можно сделать вывод, что чувствительность повышается при увеличении длины провода и его удельного сопротивления, а также при уменьшении поперечного сечения. Относительное изменение сопротивления провода является линейной функцией от деформации е и может быть выражено в виде:  где Se – коэф. тензочувствительности или чувствительность тензоэлемента.Для металлических проводов он лежит в пределах 2...6, а для п/п – 40...200.
где Se – коэф. тензочувствительности или чувствительность тензоэлемента.Для металлических проводов он лежит в пределах 2...6, а для п/п – 40...200.
При небольших изменениях сопротивления металлического провода, не превышающих 2% (что справедливо для большинства случаев), справедливо следующее соотношение:  где R0 – сопротивление тензодатчика в ненагруженном состоянии, x=Se.
где R0 – сопротивление тензодатчика в ненагруженном состоянии, x=Se.
Для полупроводниковых материалов величина тензочувствительности зависит от концентрации легирующих компонентов. Величина сопротивления уменьшается при сжатии и увеличивается при растяжении.
Применение тензорезистивного эффекта. Датчики давления предназначены для измерения всех видов давления (в том числе и разряжения) жидких и газообразных сред (в том числе нефтепродуктов). В качестве сенсоров в этих датчиках применяются емкостные или тензорезистивные сенсоры. Причём, датчики давления с емкостными сенсорами по чувствительности и диапазону уступают датчикам давления с тензорезистивными сенсорами.
На рис. в изображен элемент, состоящий из четырех тензорезисторов, образующих четыре плеча моста. Этот элемент наклеивается на мембрану. Тензорезисторы, расположенные в центре, испытывают растяжение, а на периферии – сжатие. К выводам 1 и 3 подводится питание, выводы 2, 4' и 4" образуют измерительную диагональ. Выводы 4' и 4" разомкнуты для того, чтобы можно было включить добавочный резистор R в нужное плечо и добиться подбором R равновесия моста.
Розетка из трех тензорезнсторов, показанная на рис. г применяется при измерении напряжений детали, находящейся в плосконапряженном состоянии, в том случае, когда направления действия напряжений неизвестны. По изменениям сопротивлений трех тензорезисторов определяются направления главных напряжений и их значения.
Элемент, показанный на рис. б, состоит из двух тензорезисторов и используется при измерении деформации валов при их скручивании. Д/тензорезисторов, работающих в диапазоне температур до 180°С, в качестве тензочувствительного материала используется константан. Для более высоких температур (200-1000 °С) применяются специальные сплавы. Изготавливаются из константана, нихрома, сплава на основе Ni, Mo, Pt.

Тензорезистивный эффект наблюдается преимущественно в металлах, где значение размера влияет на его сопротивление. С помощью тензорезисторов можно измерить приложенную силу, давление.

Схема использования тензопреобразователя
Пьезорезистивный эффект – изменение электрического сопротивления п/проводника под действием механических напряжений приложенных вдоль определенных кристаллических осей.

| Основная формула.  где ∆σ/σ0 – относительное изменение проводимости, n,m – индексы, пронимающие значения от 1 до 6;
где ∆σ/σ0 – относительное изменение проводимости, n,m – индексы, пронимающие значения от 1 до 6;  – эластосопротивление; – эластосопротивление;  – пьезосопротивление, Pm – тензор деформации. – пьезосопротивление, Pm – тензор деформации.
|
На рис. изображена запретная зона п/п (Езз ПП), она располагается между зоной проводимости (Ес) и валентной зоной (Еv). На ПП действует механическое воздействие. Число свободных носителей заряда зависит от ширины запрещенной зоны, т.к. при деформация кристаллической решетки полупроводника изменяется расстояния между атомами. При этом изменяется энергия электронов, часть из них переходит на более высокий энергетический уровень, возрастает число электронов проводимости, увеличивается их подвижность в электрическом поле. Поскольку концентрация свободных электронов в полупроводнике относительно невелика, небольшое ее изменение, вызванное деформацией кристаллической решетки, приводит к заметному изменению электропроводности. Которая измеряется по основной формуле.
Применение. Пьезорезистивный тактильный датчик изготавливается из мат-лов, чье эл. сопротивление зависит от приложенного механического напряжения или давления. К таким материалам относятся проводящие эластомеры или пасты, чувствительные изменению давления. Принцип действия эластомерных датчиков основа либо на изменении площади контактов при сдавливании эластомера м/д двумя проводящими пластинами (рис. А), либо на изменении толщины эластомерного слоя. В зависимости от в-ны внешней силы, действующей на датчик, меняется площадь контактной зоны м/д прижимным ус-вом и эластомером, в результате чего изменяется электрическое сопротивление. При определенном давлении эта площадь становится максимально возможной, и передаточная функция
|
|








