 2018-02-13
2018-02-13 535
535Лабораторна робота №1
Тема: Побудова та дослідження імітаційної моделі системи «об’єкт-двопозиційний регулятор»


Опис моделі
Q - інтенсивність надходження (при одиничному скачку прийняти
рівним 1);
X – вхідний сигнал;
Y – вихідний сигнал;
Yz – задане значення вихідного сигналу;
DY – різниця вихідного значення та заданого значення вихідного
сигналу;
S – керуюча дія, в двохпозиційному регуляторі 0 чи 1.
Ланки моделі:
Типу множення

X=Q*S;
Суматор:

y=x1-x2;
Аперіодична ланка першого порядку:

Функція переходів 
 ;
;

 .
.
Ланка типу гістерезис:

Текст програми:
void __fastcall TForm1::Button2Click(TObject *Sender)
{
Close();
}
//---------------------------------------------------------------------------
void __fastcall TForm1::Button1Click(TObject *Sender)
{
float y,x,dt,dy,t,K0,T0,yz,A1,A2;
int i;
K0=atof(Edit1->Text.c_str());
dt=atof(Edit2->Text.c_str());
A1=atof(Edit3->Text.c_str());
T0=atof(Edit4->Text.c_str());
yz=atof(Edit5->Text.c_str());
A2=atof(Edit6->Text.c_str());
Series1->Clear();
Series2->Clear();
x=1;
y=0;
for (i=0;i<1000;i++)
{
y=y+(K0*x-y)/T0*dt;
dy=y-yz;
Series1->AddXY(i,y," ",clRed);
Series2->AddXY(i,yz," ",clGreen);
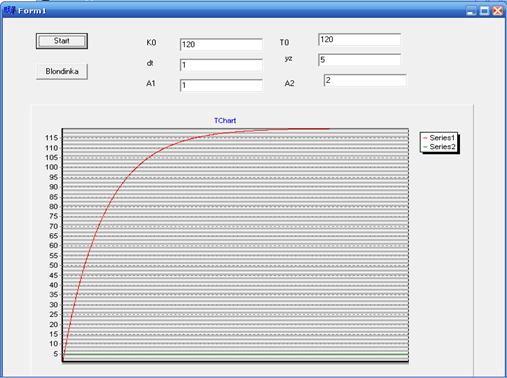
1. В середовищі побудувати та відлагодити імітаційну модль системи “об*єкт-двохпозиційний регулятор». Передбачити можливість змінювати параметри об’єкта (К0, Т0), кроку моделювання (dt), параметрів регулятора (А1, А2).

2. Дослідити роботу моделі без регулятора (при S=1). Визначити адекватність моделі, дослідити вплив кроку моделювання на якість моделі, визначити часові обмеження використання моделі.
3. Дослідити вплив параметрів регулятора на якість регулювання. Обрати оптимальні значення.

Висновок: В даній лабораторній роботі ми побудували і дослідили імітаційну модель «об’єкт – двопозиційний регулятор», вплив параметрів регулятора (А1, А2) та час рулювання (dt) для якісного регулювання моделі, визначили їх оптимальні параметри та час.
Лабораторна робота №2
Тема: Побудова та дослідження імітаційної моделі системи «об’єкт – трьохпозиційний регулятор».

Рис.2 Структурна схема імітаційної моделі
Опис моделі
Q - інтенсивність надходження (при одиничному скачку прийняти рівним 1- в прямому чи -1 - в зворотному включенні)
X – вхідний сигнал;
Y – вихідний сигнал;
Yz – задане значення вихідного сигналу;
DY – різниця вихідного значення та заданого значення вихідного сигналу;
S – керуюча дія, в трьох позиційному регуляторі -1, 0 чи 1.
Дана імітаційна модель подібна до попередньої (лабораторна робота №1), вона відрізняється лише наявністю ланки типу «подвійний гістерезис», що імітує трьохпозиційний регулятор.
Текст програми:
void __fastcall TForm1::Button2Click(TObject *Sender)
{
Close();
}
//---------------------------------------------------------------------------
void __fastcall TForm1::Button1Click(TObject *Sender)
{
float y,x,dt,dy,t,K0,T0,yz,A1,A2,A3,A4;
int i;
K0=atof(Edit1->Text.c_str());
dt=atof(Edit2->Text.c_str());
A1=atof(Edit3->Text.c_str());
T0=atof(Edit4->Text.c_str());
yz=atof(Edit5->Text.c_str());
A2=atof(Edit6->Text.c_str());
A3=atof(Edit7->Text.c_str());
A4=atof(Edit8->Text.c_str());
Series1->Clear();
Series2->Clear();
x=1;
y=0;
for (i=0;i<1000;i++)
{
y=y+(K0*x-y)/T0*dt;
dy=y-yz;
Series1->AddXY(i,y," ",clRed);
Series2->AddXY(i,yz," ",clGreen);
{
if (dy<A1) x=1;
if ((dy>A1)&(dy<A3)) x=0;
if (dy>A4) x=-1;
}
}
- В середовищі побудувати та відлагодити імітаційну модель системи «Об’єкт- трипозиційний регулятор». Передбачити можливість змінювати параметри об’єкта (К0,Т0), кроку моделювання (dt), парметрів регулювання (А1, А2, А3, А4).
- Дослідити роботу моделі без регулятора (при S=1). Отримати криву розгону об’єкта, визначити адекватність моделі, дослідити вплив кроку моделювання на якість моделі.

- Доповнити модель контуром зворотнього зв’язку з 3-позиційним регулятором та дослідити вплив параметрів на якість регулювання. Дослід провести при та при. Обрати оптимальне значення.

Висновок: В даній лабораторній роботі ми побудували і дослідили імітаційну модель «об’єкт – трипозицйний регулятор», вплив параметрів регулятора (А1, А2, А3, А4) та час рулювання (dt) для якісного регулювання моделі, визначили їх оптимальні параметри та час.
Лабораторна робота №3
Тема: Побудова та дослідження імітаційної моделі системи «об’єкт-ПІД-регулятор»

Рис.3 Структурна схема імітаційної моделі
Опис моделі
Q - інтенсивність надходження (при одиничному скачку прийняти рівним 1в прямому чи - 1 в зворотному включенні)
X – вхідний сигнал
Y – вихідний сигнал;
Yz – задане значення вихідного сигналу;
DY – різниця вихідного значення та заданого значення вихідного сигналу
Yp – керуюча дія, в ПІД-регуляторі це безперервна функція.
Дана імітаційна модель подібна до попередніх, (лабораторна робота №1,2), вона відрізняється лише наявністю ПІД-регулятора.
ПІД-регулятор можна представити у вигляді трьох ланок: пропорційної, інтегральної та диференційної, коефіцієнти Кп, Кі та Кд враховують вплив кожної складової на результат; вихідний сигнал обчислюється як сума всіх трьох.
Текст програми:
void __fastcall TForm1::Button2Click(TObject *Sender)
{
Close();
}
//---------------------------------------------------------------------------
void __fastcall TForm1::Button1Click(TObject *Sender)
{
float y,x,dt,J,Dy,Dpy,Yr,t,K0,T0,yz,xi,Kn, Ki, Kd;
int i;
K0=atof(Edit1->Text.c_str());
dt=atof(Edit3->Text.c_str());
Kn=atof(Edit4->Text.c_str());
T0=atof(Edit2->Text.c_str());
yz=atof(Edit7->Text.c_str());
Ki=atof(Edit5->Text.c_str());
Kd=atof(Edit6->Text.c_str());
Series1->Clear();
Series2->Clear();
Yr=0;
Dpy=0;
x=1;
y=0;
J=0;
for (i=0;i<150;i++)
{ x=1-Yr;
y=y+(K0*x-y)/T0*dt;
Dy=y-yz;
J=J+Dy*dt;
Yr=(Kn*Dy+Ki*J+Kd*(Dy-Dpy)/dt);
Dpy=Dy;
Series1->AddXY(i,y," ",clRed);
Series2->AddXY(i,yz," ",clGreen);
}}
- В середовищі побудувати та відлагодити імітаційну модель системи «Об’єкт- ПІД-регулятор». Передбачити можливість змінювати параметри об’єкта (К0,Т0), кроку моделювання (dt), парметрів регулювання (К1, Кn, Кp).

- Дослідити роботу моделі без регулятора (при S=1). Отримати криву розгону об’єкта, визначити адекватність моделі, дослідити вплив кроку моделювання на якість моделі.

- Доповнити модель контуром зворотнього зв’язку з ПІД-позиційним регулятором та дослідити вплив параметрів на якість регулювання. Дослід провести при та при. Обрати оптимальне значення.

Висновок: В даній лабораторній роботі ми побудували дослідили імітаційну модель «об’єкт – ПІД-регулятор», вплив параметрів регулятора ((К1, Кn, Кp) та час рулювання (dt) для якісного регулювання моделі, визначили їх оптимальні параметри та час.








