 2018-02-14
2018-02-14 1240
1240В системах автоматики используют двух фазные двигатели переменного тока с различным способом управления. Асинхронный двигатель состоит из короткозамкнутого ротора 1 с обмоткой, выполненной в форме беличьей клетки, и двух статорных обмоток 2 и 3 со взаимно перпендикулярными магнитными осями. Обмотка возбуждения 2(ОВ) подключается к источнику переменного напряжения через конденсатор, а на обмотку управления 3(ОУ) напряжение от этого источника подается через потенциометр R.
Обе эти обмотки совместно создают вращающийся магнитный поток статора, который может быть создан по одному из двух возможных способов: или за счет подключения фазосдвигающей емкости в обмотку возбуждения (Рис 44а), или за счет подключения в обмотку управления фазосдвигающегося устройства ФСУ (Рис.446).
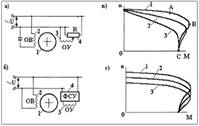
Рис.44. Схемы подключения и характеристики асинхронного исполнительного двигателя переменного тока.
В первом случае конденсатор смещает во времени процесс нарастания напряжения в обмотке возбуждения, поэтому магнитные потоки в ОВ и ОУ смещены по фазе на 90° (по времени нарастания). Это позволяет создавать вращающийся с постоянной скоростью магнитный поток. Этот вращающийся магнитный поток сцепляется с короткозамкнутой обмоткой ротора, в которой наводится вихревой ток. Этот ток наводит вторичный магнитный поток ротора. Магнитные потоки ротора и статора, сцепляясь, увлекают друг друга, создавая вращающий момент на роторе двигателя.
Нагрузочная характеристика асинхронного, исполнительного двигателя этого типа показана на рис.44в. При увеличении момента сопротивления М на роторе от нуля до точки А, происходит незначительное падение частоты вращения ротора. Если величина момента на роторе выходит по значению за точку А, происходит резкое нелинейное снижение частоты вращения ротора до точки В. Незначительное дальнейшее превышение момента на роторе двигателя приводит к его «опрокидыванию», которое проявляется в резком нелинейном снижении до нуля не только скорости вращения ротора, но и сопровождается падением вращающегося момента до точки С.
Частотное регулирование скорости вращения ротора, схема которого представлена на Рис 446, осуществляется за счет использования специальных фазосмещающего устройства, включенного в обмотку управления.
Это устройство плавно меняет скорость вращения магнитного потока статора в сторону ее уменьшения. Этот способ управления асинхронным двигателем более эффективно позволяет менять частоту вращения его ротора., но и более сложен по конструктивному исполнению. Нагрузочная характеристика этого способа управления асинхронным двигателем показана на рис.44г.

