 2020-01-14
2020-01-14 156
156ЗАДАНИЕ НА КУРСОВУЮ РАБОТУ
по дисциплине "Теоретические основы радиоэлектронной борьбы"
Студент _ Федосеев А.И. ___________код________ группа 311
Тема: "СРЕДСТВА ПОСТАНОВКИ ПОМЕХ И ПОМЕХОЗАЩИТЫ РЛС"
Срок представления курсовой работы к защите " 10 " мая 2007 г.
Исходные данные для проектирования:
а). Исходные данные к курсовой работе:
Тип РЛС:
Параметры РЛС: дальность обнаружения цели не менее R= 200+10*М =360км (М - номер по журналу);
определяемые координаты цели:
Параметры цели: ЭПР цели Е = (7 - М/5) =3,8м2, максимальная скорость цели V = (1000-10*М), м/с=840м/с;
Виды применяемых помех: (активная, пассивная, уводящая по дальности (скорости), на частоте сканирования)
б). Требования к проекту
Разработать алгоритмы, структурные схемы постановщика помех и средств помехозащиты радиолокационной станции, провести анализ эффективности применения средств помехопостановки и помехозащиты.
Обязательные разделы пояснительной записки курсовой работы
Титульный лист.
Задание на курсовую работу.
Содержание.
Введение.
Анализ задачи и ее формализация.
Расчет параметров помехопостановщика (мощность передатчика помех, средств создания помех, параметров помех).
Расчет зон прикрытия помехами (пассивными и активными).
Расчет параметров средств помехозащиты (алгоритма помехозащиты структуры и параметров).
Анализ эффективности применения комплекса помех и средств помехозащиты.
Оценка требований к аппаратно-программным ресурсам средств конфликтующих сторон.
Выбор и технико-экономическое обоснование технологической базы для реализации проекта.
Составление структурной схемы устройства и описание ее работы
Заключение
Список использованных источников
Графические материалы (1 л.)
Руководитель работы В.И. Кошелев
Задание принял к исполнению студент ______________________
Варианты заданий на КР (М - номер по списку в журнале группы)
Группа 311
| № п/п | Фамилия | Тип РЛС | Координаты | Координаты |
| АРТЕМОВ И.В. | РЛ головка самонаведения | угловые координаты, скорость | помеха от земной поверхности, помеха радиовзрывателю | |
| АРХИПОВ Д.Е. | Вертолетная РЛС | скорость, азимут | помеха от земной поверхности, уводящая по скорости | |
| БЕЗЛЮДСКИЙ А.А. | РЛС обзора | дальность и азимут | пассивная+ активная шумовая, уводящая | |
| БОЧКОВ Р.А. | РЛС дальнего обнаружения | дальность и азимут, угол места | уводящая по дальности+ активная шумовая | |
| ГЛЕБОВ Р.Д. | РЛС дальнего обнаружения | дальность и азимут, угол места | пассивная+ активная шумовая | |
| ДРОНОВА М.А. | РЛС дальнего обнаружения | дальность и азимут | помеха от земной поверхности, активная шумовая | |
| ЕГОРОВ С.В. | РЛС дальнего обнаружения | дальность и азимут, угол места | помеха от земной поверхности, уводящая по дальности | |
| ИСАЕВ П.А. | РЛС дальнего обнаружения | дальность и азимут | уводящая по дальности+ активная шумовая | |
| КОЗЛОВ А.Н. | РЛС дальнего обнаружения | дальность и азимут | пассивная+ активная шумовая+ уводящая по дальности | |
| КУЛИКОВ Д.В. | РЛ головка самонаведения | угловые координаты, скорость | помеха от земной поверхности, помеха радиовзрывателю | |
| МАКАРЬЕВА И.А. | Вертолетная РЛС | скорость, азимут | помеха от земной поверхности, уводящая по скорости | |
| ПАХОМОВ Д.В. | РЛС обзора | дальность и азимут | пассивная+ активная шумовая, уводящая | |
| РЯБКОВА.С. | РЛС дальнего обнаружения | дальность и азимут, угол места | уводящая по дальности+ активная шумовая | |
| САПРЫКИН А.В. | РЛС обзора | дальность и азимут | пассивная+ активная шумовая | |
| СОПОВ С.М. | РЛС обзора | дальность и азимут | уводящая по дальности+ активная шумовая | |
| ФЕДОСЕЕВ А.И. | РЛС УВД | дальность, азимут, высота | пассивная+ активная шумовая | |
| ХОДОРЧЕНКО В.В. | Бортовая РЛС | скорость, азимут | помеха от земной поверхности, активная шумовая | |
| ЧЕРНЫШОВ С.В. | Бортовая РЛС | скорость, азимут | помеха от земной поверхности, уводящая по скорости | |
| ШАХОВ Д.А. | Бортовая РЛС | скорость, азимут | пассивная и помеха радиовзрывателю | |
| ШМЫРЕНКОВ С.А. | РЛС УВД | дальность и азимут | уводящая по дальности+ активная шумовая | |
| ЩЕРБИНИН Е.С. | РЛС обзора | дальность и азимут | пассивная+ помеха на частоте сканирования |
Содержание
1). Введение
2). Анализ задачи и ее формализация
4). Расчет зон прикрытия помехами (пассивными и активными)
5). Расчет параметров средств помехозащиты (алгоритма помехозащиты, структуры и параметров)
6). Анализ эффективности применения комплекса помех и средств помехозащиты
7). Оценка требований к аппаратно-программным ресурсам средств конфликтующих сторон
8). Выбор и технико-экономическое обоснование технологической базы для реализации проекта
9). Составление структурной схемы устройства и описание ее работы
10). Заключение
11). Список использованных источников
Введение
Современный подход к проектированию радиотехнических систем (РТС) базируется на научно обоснованных методиках расчета входящих в них подсистем с учетом целевого назначения, условий функционирования и модельного описания информационных сигналов и помех. Обеспечить высокое качество проектирования в короткие сроки возможно лишь при использовании компьютерной технологии на всех этапах разработки РЛС. Проектирование базируется на принципах системного подхода, основные из которых состоят в задании критериев эффективности, решении оптимизационных задач и сравнении вариантов реализации систем.
Существует множество способов классификации РЛС. В частности они могут классифицироваться по назначению, характеру принимаемого сигнала, способу обработки, архитектуре и т.д. В самом общем виде РЛС делят на информационные и управляющие. К первым относятся системы для сбора информации о наблюдаемых воздушных, космических и наземных объектах. Ко второму типу относятся РЛС управления объектами по данным радиолокационных измерений, такие как РЛС управления воздушным движением.
Анализ задачи и ее формализация
Основываясь на требованиях технического задания нам необходимо создать средства постановки помех и помехозащиты для радиолокационной станции управления воздушным движением работающей по трем координатам: дальности, азимуту и углу места. Разработать для нее алгоритмы и методы постановки помех: активной шумовой и пассивной, а так же предусмотреть методы защиты нашей станции от данных видов помех. В т. ч. разработать структурные схемы постановщика помех и средств помехозащиты радиолокационной станции, провести анализ эффективности применения средств помехопостановки и помехозащиты.
Исходными данными является дальность обнаружения цели (равная 360км), ЭПР цели (=3,8м2), максимальная скорость цели (=840м/с), а так же виды помех: активная и пассивная. Для удобства расчет параметров РЛС будем производить с использованием компьютерной программы “Стрела 2.0”. Расчет параметров средств помехозащиты произведем посредством математического пакета “Mathcad 2001”. Далее будет представлен расчет данной РЛС в пакете “Стрела 2.0”.

Рис 1.
Используем расчет параметров РЛС классическим методом. На рис1. представлено диалоговое окно программы в котором мы задаем тип РЛС по основному режиму работы - когерентно-импульсная, по назначению - наземная. Высота установки антенны равна 15м. В станции будет использоваться обработка по средством режекции и когерентного накопления. Однозначно измеряемую дальность зададим согласно техническому заданию, а именно 360км.

Рис 2.
На рис.2 представлено диалоговое окно программы, в котором задаем тип сигнала - простой ( применение сложного сигнала позволяет увеличить разрешающую способность по дальности при неизменной разрешающей способности по скорости, но та как в нашем случае определение скорости не требуется, от применения сложного сигнала мы откажемся, чтобы не усложнять систему), длина волны - равна 10 м, а так же тип поляризации - вертикальная.
помехозащита радиолокационная система
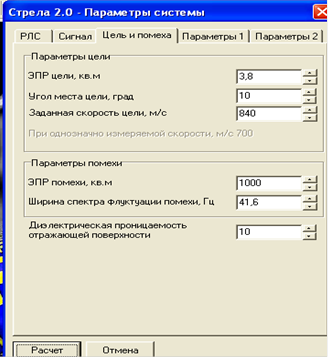
Рис.3
На Рис.3 представлено диалоговое окно программы, в котором задаются параметры помехи и цели. Параметры цели задаем согласно техническому заданию: эффективная поверхность рассеивания (ЭПР) - 3,8  , максимальная скорость цели - 840 м/с.
, максимальная скорость цели - 840 м/с.
Параметры же пассивной помехи необходимо задавать таким образом, чтобы ширина спектра флуктуации помехи, нормированная к периоду повторения РЛС находилась в пределах:
 - возьмём значение равное 0,1.
- возьмём значение равное 0,1.
Где  - ширина спектра флуктуации помехи, а
- ширина спектра флуктуации помехи, а  - период повторения импульсов. Период повторения можно рассчитать по формуле:
- период повторения импульсов. Период повторения можно рассчитать по формуле:
 =2*
=2*  /С=2,4 мс
/С=2,4 мс
Где - максимальная дальность действия РЛС (равная 360 км.), С - скорость света (3*108). Таким образом ширину спектра флуктуации помехи, которую необходимо задать программе можно рассчитать:
=0,1/ =41,6 Гц.
именно это значение ширины спектра флуктуации помехи задаётся в программе.
Диэлектрическую проницаемость отражающей поверхности априорно неизвестна, поэтому используем значение, установленное по умолчанию,=10.
ЭПР помехи необходимо задать так, чтобы отношение шум/помеха на входе приёмника было равным - 50…-60 Дб. Как в дальнейшем покажет расчёт, при ЭПР помехи равной 1000  , это отношение будет равно - 51,3 Дб.
, это отношение будет равно - 51,3 Дб.

Рис.4
На Рис.4 представлено диалоговое окно программы, в котором задаёмся мощностью передатчика РЛС равной 550 КВт, что вполне соответствует реальным РЛС ведущим работу на заданной дальности. Коэффициент усиления антенны задаём равным 700, (у современных РЛС этот параметр лежит в пределах 300…800) для обеспечения наилучшего отношения шум/помеха на входе. Энергетическая дальность должна соответствовать однозначно измеряемой дальности, то есть 360 км. Разрешающую способность по дальности  R зададим равной 100м (что в действительности соответствует реальным РЛС такого диапазона, к примеру 19Ж6). Этот параметр определяет длительность импульсов зондирующего сигнала, которую можно рассчитать:
R зададим равной 100м (что в действительности соответствует реальным РЛС такого диапазона, к примеру 19Ж6). Этот параметр определяет длительность импульсов зондирующего сигнала, которую можно рассчитать:  =0,7 мкс
=0,7 мкс
Вероятность правильного обнаружения задаём на уровне 0,9, а вероятность ложной тревоги на уровне  , эти параметры соответствуют требованиям, предъявляемым к современным РЛС. Потери при обработке будем считать равными 3 Дб.
, эти параметры соответствуют требованиям, предъявляемым к современным РЛС. Потери при обработке будем считать равными 3 Дб.

Рис.5
На Рис.5 представлено диалоговое окно программы, в котором задаём диапазоны углов сканирования в азимутальной и угломестной плоскостях. Так как в техническом задании эти параметры не оговорены, то принимаем что проектируемая РЛС будет иметь сектор сканирования в азимутальной плоскости от 0 до 60 градусов, с разрешением 1 градус, а в угломестной плоскости сектор сканирования будет от 0 до 30 градусов, с разрешением 5 градусов. Расчёт параметров РЛС будем производить исходя из времени обзора сектора сканирования, которое зададим равным 10000мс (=10с).

Рис.6
На Рис.6 представлено диалоговое окно программы в котором отображены результаты расчёта РЛС, относительно заданных параметров. Необходимая мощность передатчика практически соответствует заданной, обеспечивается небольшой запас по максимальной энергетической дальности, он составляет 14,9 км. Разница в коэффициентах улучшения сигнал/ (помеха+шум) оптимальной и рассматриваемой системы составляет 2 Дб. Наиболее существенным стоит отметить, что отношение сигнал/помеха на входе составляет - 24,2 Дб, отношение шум/помеха - 51,3 Дб, в дальнейшем будет приведён расчёт режекторного фильтра, который будет подавлять эту помеху до уровня шумов. Отношения сигнал/шум и сигнал/ (помеха+шум) на входе соответственно равны 27,09 Дб и - 24,2 Дб. Частота повторения и период следования импульсов соответствуют значениям, рассчитанным выше. Однозначно определяемая дальность соответствует заданной, то есть 360 км, однозначно измеряемая скорость составляет 1042 м/с. Относительная ширина спектра помехи составляет 0,09984 (приближенно 0,1), как и было показано ранее. При заданном времени обработки 10 с, время обработки в одном направлении составляет 27,78 мс. Общее число импульсов в пачке составляет 11, выигрыш в отношении сигнал/шум 10,41 Дб, выигрыш в отношении сигнал/ (помеха+шум) 61,71 Дб, пороговый сигнал с учётом потерь - 24,91Дб, а разница порог-выигрыш сигнал/ (помеха+шум) - 0,7038 Дб.
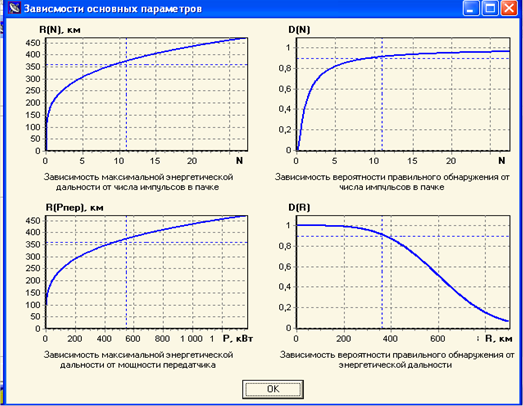
Рис.7 (Зависимости основных параметров)
На основе представленных на Рис.7 графиков видно, что при полученных в расчётах 11 импульсах в пачке обеспечивается максимальная энергетическая дальность 374,9 км, а вероятность правильного обнаружения соответствует заданной на уровне 0,9. Также представлена зависимость максимальной энергетической дальности от мощности передатчика, из корой видно что заданная мощность 550 КВт, обеспечивает заданную энергетическую дальность. Зависимость вероятности правильного обнаружения от энергетической дальности показывает, что при заданной энергетической дальности 360 км, обеспечивается вероятность правильного обнаружения на уровне 0,9.
3). Расчет параметров помехопостановщика (мощность передатчика помех, средств создания помех, параметров помех).
Опираясь на полученные выше основные характеристики РЛС, можно перейти к расчету параметров помехопостановщика. Общая задача постановки активных помех - сокрытие объектов или факта передачи радиосигнала в некоторой прикрываемой области пространства. В нашем случае, так как это не оговорено, может предполагаться действие активных помех любых видов.
В общем случае цель и постановщик активных помех могут находиться как в одной точке (самоприкрытие объекта), так и в различных точках пространства. В ситуации самоприкрытия эффективность помехи тем выше, чем больше расстояние от радиолокатора до цели и падает по мере сближения с РЛС.
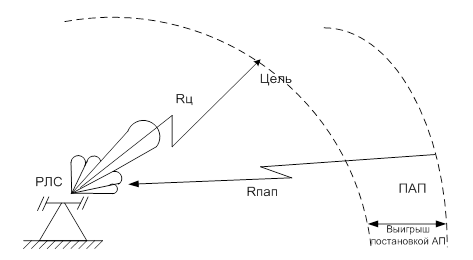


Рис.8
При удалении цели на расстояние больше чем Rцmin отношение с/ап уменьшается и не достаточно для обнаружения цели. При приближении цели меньше чем на Rцmin от РЛС, с/ап возрастает что создает условия для обнаружения цели. Важным фактором здесь является соотношение мощности передатчика РЛС и постановщика АП.
Дальность местонахождения постановщика активных помех должна выбираться из условия превышения на 20-50% дальности максимального обнаружения РЛС. В то время как мощность передатчика активных помех должна составлять не больше 1-10% от мощности передатчика РЛС.
Основываясь на приведенных выше соотношениях примем дальность местонахождения постановщика активных помех равной 30% от максимальной дальности действия РЛС, а именно Rпап = 468км; мощность передатчика активных помех P = 22кВт (что составляет 4% от Rрлс). Учитывая свойства антенн метровых волн, большой коэффициент усиления постановщика получить нельзя, следовательно зададимся значением Gпап = 100, что приблизительно соответствует решетке продольного излучения состоящей из полуволновых вибраторов, что практически и реализуется на современных самолетах. Необходимо также учесть, что постановщик может работать как по главному лучу, так и по боковым лепесткам ДН АС рлс.
В качестве пассивных помех могут применяться полуволновые вибраторы или диполи разбрасываемые в атмосфере, а так же широкодиапазонные металлизированные ленты, создающие отражение в более широком спектре частот. Далее приведен расчет диполей:
Sдmax=0,86*  Ориентация диполей очень важна, но так как она случайна, то получаем: Sдmax=0,17* =17 S1/Sдmax=1000/17=59диполей
Ориентация диполей очень важна, но так как она случайна, то получаем: Sдmax=0,17* =17 S1/Sдmax=1000/17=59диполей
Ширина спектра отражений зависит от разброса скоростей диполей в облаке:  . Если предположить что средняя скорость падения диполей
. Если предположить что средняя скорость падения диполей  , а скорость ветра
, а скорость ветра  , то
, то  - средняя скорость движения облака пассивных помех.
- средняя скорость движения облака пассивных помех.
Эти и последующие данные будут использованы с целью расчета средств помехозащиты в пакете "Стрела 2.0".








