 2020-01-14
2020-01-14 167
167
При анализе систему автоматического управления представляют совокупностью типовых звеньев: пропорционального, апериодического или инерционного первого порядка, колебательного, интегрирующего, дифференцирующего или запаздывающего звеньев.
Рассмотрим структурную схему типовой САР (рисунок 3).
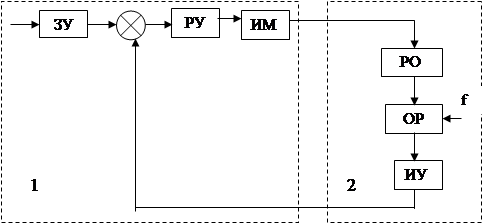 |
Рисунок 3 - Структурная схема типовой САР.
На рисунке 3 регулирующее устройство РУ с исполнительным механизмом ИМ, задающим ЗУ и суммирующими устройствами образуют автоматический регулятор 1. Регулирующий орган РО, собственно объект регулирования ОР и измерительное устройство ИУ образуют обобщенный объект регулирования 2. Таким образом, автоматическая система регулирования состоит из регулятора (Р) и объекта (О), взаимодействующих между собой по замкнутому контуру (рисунок 4).
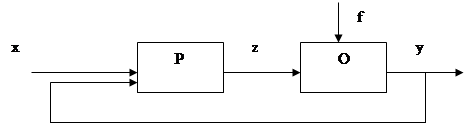
Рисунок 4 - Упрощённая структурная схема типовой САР.
Объект управления, как уже отмечалось выше, у нас представлен совокупностью двух типовых звеньев: апериодического и звена запаздывания.
Инерционное или апериодическое звено 1 – го порядка (применяется при теплообмене, при подаче газа в емкость). Звено характеризуется передаточным коэффициентом k и постоянной времени Т, определяемой, например, по касательной в точке t0 (максимальной скорости изменения выходной величины);
Запаздывающее звено, в котором входная величина копируется на выход, но с некоторой задержкой по времени Y(t + T) = X(t) (например, ленточный транспортер или эскалатор метро). Звено характеризуется временем задержки τ.








