2020-04-20
2020-04-20 578
578Заданные показатели качества определяются по методике профессора Г.Е. Иванченко [4] применительно к конкретному случаю, исходя из следующих положений.
САР скорости привода подъемных машин представляет собой систему программного управления, исследование которой можно выполнять двумя путями. Первый путь предусматривает исследование процесса обработки заданной диаграммы скорости в течение всего периода движения, второй - на ограниченном участке тахограммы, где к САР предъявляются наиболее жесткие требования. Последний путь существенно проще и обеспечивает при достаточной точности исследований получение общих зависимостей, необходимых для синтеза системы.
Мгновенное изменение заданного значения регулируемого параметра создает более тяжелые условия регулирования, чем плавное. Это позволяет свести исследование движения привода подъемной установки к обычной задаче классической теории автоматического управления Обеспечение системой желаемого качества регулирования при ступенчатом воздействии является гарантией выполнения требуемой тахограммы при плавном задании скорости.
В статической системе управления установившееся значение отклонения скорости ∆V1, от заданной может быть принято постоянной величиной, так как статическая нагрузка в течение переходного процесса остается практически неизменной. Мгновенное значение ошибки по скорости определяется выражением
∆V= ∆Vс+∆VД
где ∆VД - динамическая ошибка.
Знак (+) принимается при разгоне в двигательном и замедлении в тормозном режимах, знак (-) при замедлении е двигательном и разгоне а тормозном режимах.
Максимальное значение динамической ошибки соответствует началу переходного процесса и равно величине скачка задающего воздействия

В период разгона подъемного двигателя в двигательном и замедлении в тормозном режимах отклонение действительной скорости от заданной будет наибольшим. Поэтому вопрос обеспечения требуемой точности САР необходимо решать именно для этого случая.
Для обеспечения нормальной работы системы при принятом способе управления двигателем необходимо соблюдение условия

которое ограничивает допустимую величину динамической ошибки. Значение статической ошибки находится из условия
где  - допустимая скорость в момент наложения предохранительного тормоза,
- допустимая скорость в момент наложения предохранительного тормоза,
 м/с.
м/с.
Следовательно, значение  не должно превышать
не должно превышать  м/с.
м/с.
Максимальная длительность переходного процесса из условия его затухания к моменту очередного изменения заданной скорости на величину
 определяется соотношением
определяется соотношением

где  - заданная длительность переходного процесса. Заданная длительность переходного процесса
- заданная длительность переходного процесса. Заданная длительность переходного процесса

где амах - наибольшее ускорение (замедление) подъемного сосуда
Если заданная скорость изменяется плавно, что имеет место в нашем случае, точность управления возрастает м расчетное время переходного процесса может быть найдено из выражения

где  - коэффициент, зависящий от степени характеристического уравнения системы, равный 2,2 для уравнений третьего порядка и двум для уравнения четвертого порядка.
- коэффициент, зависящий от степени характеристического уравнения системы, равный 2,2 для уравнений третьего порядка и двум для уравнения четвертого порядка.
Следовательно, расчетное время переходного процесса
 с
с
Максимальное перерегулирование  и число колебаний переходного процесса и могут быть приняты соответственно
и число колебаний переходного процесса и могут быть приняты соответственно

Приведенные выражения определяют показатели качества, необходимые для выполнения синтеза проектируемой системы привода.
Методика синтеза САР скорости
Задача синтеза заключается в выборе структуры и параметров системы автоматического регулирования, обеспечивающей требуемую точностью удовлетворяющей заданным показателям качества. Выбор алгоритма и расчет параметров во многом определяются статическими и динамическими свойствами объектами управления.
Сложность исследования рассматриваемого электропривода как объекта управления заключается в том, что он описывается системой нелинейных уравнений [5,6], аналитическое решение которых затруднительно. Как показано в ряде работ, в том числе и в [4] синтез САР скорости электропривода ШГТУ можно выполнить по его линеаризованной математической модели. Однако при этом не учитываются изменения динамических характеристик и структурных схем асинхронного двигателя, имеющих место при смешанном управлении им, как принято в проекте. Поэтому в основу синтеза данной САР положены рекомендации по выбору структуры и параметров линеаризованной модели тиристорного привода как объекта управления, разработанные [4-7]
Линейная математическая модель исследуемого объекта управления в дифференциальной форме записи имеет вид

где j - момент инерции подъемной установки, приведенный к валу двигателя;
ω - циклическая частота вращения двигателя;
v - относительное значение напряжения, подводимого к двигателю (первой гармонике - в двигательном режиме, постоянной составляющей - в режиме динамического торможения);
р - относительная величина сопротивления роторной цепи;с - статический момент нагрузки;
К β, Кэ, Кρ - соответственно коэффициент жесткости механической характеристики, коэффициент чувствительности к изменению питающего напряжения и коэффициент чувствительности к изменению активного сопротивления ротора.
Минимальные значения  . имеют место при
. имеют место при  и
и
определяются выражениями:
 ,
,
 ,
,
 ,
,
 ,
,
где  - значение критического момента,
- значение критического момента,  ;
;
 - максимальное значение момента, необходимое для выполнения
- максимальное значение момента, необходимое для выполнения
заданной программы скорости, ;
 - момент инерции установки; приведенный к валу двигателя,
- момент инерции установки; приведенный к валу двигателя,  ;
;  -синхронная циклическая частота вращения двигателя.
-синхронная циклическая частота вращения двигателя.
 - критическое скольжение.
- критическое скольжение.
Номинальное скольжение двигателя

Критическое скольжение на естественной, механической характеристике

Синхронная циклическая частота вращения двигателя

Номинальный и критический моменты двигателя:


Максимальный момент на валу двигателя;
Следовательно, значения  определятся как
определятся как
 ,
,
 ,
,
 ,
,

Параметры остальных элементов, входящих в исходную САР (рисунок 3), определяются следующими соображениями: поскольку инерционность системы фазного управления (СФУ) и тиристорного коммутаторов (ТК) во много раз меньше инерционности электромеханической системы, то эти устройства можно рассматривать как практически безынерционные звенья, описываемые уравнениями в приращениях;


где  - угол открытия тиристоров, эл. град;
- угол открытия тиристоров, эл. град;
 -напряжение управления. В;
-напряжение управления. В;
 - коэффициенты передачи системы фазного управления
- коэффициенты передачи системы фазного управления
тиристорного коммутатора соответственно.
Таким образом, желаемый коэффициент усиления разомкнутой САР из условия статической точности в данном случае составит
где  - максимальная скорость движения подъемных сосудов, согласно заданию
- максимальная скорость движения подъемных сосудов, согласно заданию 
Тогда желаемый коэффициент усиления разомкнутой САР из условия статической точности будет равен

коэффициент усиления усилителя

коэффициент передачи замкнутой системы
 ,
,
коэффициент передачи системы по ошибке

Значение статической ошибки  определяется условием (3.4). Используя выражения, приведенные выше передаточные функции разомкнутой и замкнутой САР по основному управляющему воздействию
определяется условием (3.4). Используя выражения, приведенные выше передаточные функции разомкнутой и замкнутой САР по основному управляющему воздействию
 ;
;
 ,
,
где  - некомпенсированная постоянная времени.
- некомпенсированная постоянная времени.
 c.
c.
Обязательным условием устойчивости такой системы является выполнение соотношений ТОБ >ТФС. и КР >1, что соблюдается.
Передаточная функция оптимальной САР будет иметь вид
 ,
,
Передаточная функция регулятора определяется по формуле
 ,
,
где  - изодромная постоянная времени.
- изодромная постоянная времени.
Изодромная постоянная времени определяется как
 с.
с.
При работе асинхронного двигателя в точке, соответствующей критическому скольжению, получается структурно-неустойчивая система содержащая два последовательно включенных неминимально-фазовых звена.
Делается попытка синтезировать структурно-устойчивую САР, для чего в числителе передаточной функции регулятора (ПИ-регулятор) меняется минус на плюс.
Тогда передаточная функция КУ будет иметь вид
 ,
,
где К - коэффициент усиления.
Коэффициент усиления определяется по формуле
Исходная ЛАЧХ строится по передаточной функции замкнутой САР по основному управляющему воздействию.
 ,
,
Р=20lgKP=20lg18,6=25,4 дВ;
Т1=0,74 с;  с-1; lg
с-1; lg  ;
;
Т2=0,0213с;  с-1; lg
с-1; lg  .
.
Анализ статистического САР скорости
С целью проверки правильности выбора КУ выполняется построение и анализ переходной характеристики системы по основному управляющему и возмущающему воздействию для двигательного режима. В построении переходных процессов в режиме торможения нет необходимости, так как применяемая в практике методика синтеза при правильно выбранном КУ гарантирует обеспечение САР заданных показателей качества во всех возможных режимах работы привода ШПУ.
Для определения времени регулирования необходимо построить трубку точности, которая определяется по допустимому отклонению от установившегося значения переходной характеристики (±3÷5%).
Максимальное перерегулирование определяется по формуле
Ơ= 
где ∆ω m- максимальное значение переходной функции;
∆ω уст - установившееся значение переходной функции.
4. Исследование астатического САР скорости ШПУ
Показатели качества переходного процесса для астатического варианта САР принимаются равными показателям статистического варианта САР.
Синтез астатического САР скорости ШПУ
Схемная реализация регулятора САР производятся на основе операционных усилителей. Принципиальная схема регулятора изображена на рисунке.
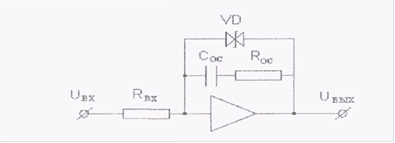
Принципиальная электрическая схема ПИ-регулятора.
Параметры элементов электрической схемы связаны системой
Для нахождения параметров схемы необходимо задаться значением емкости обратной связи
Принимается  = 100 мкФ, тогда
= 100 мкФ, тогда
 Ом
Ом

На основе структуры САР, изображенной на рисунке 6, и определения параметров типовых звеньев, составляются структурные схемы САР по управлению и возмущению в числовом виде.
Анализ астатической САР скорости ШПУ
С целью проверки правильности выбора регулятора выполняется построение и анализ переходной характеристики системы по основному управляющему и возмущающему воздействиям для двигательного режима. В построении переходных процессов в режиме торможения нет необходимости, так как применяемая в проекте методика синтеза при правильно выбранном регуляторе гарантирует обеспечение САР заданных показателей качества во всех возможных режимах работы привода ШПУ.
5. Экономическая эффективность применения системы тиристорного асинхронного электропривода для ШПУ
Фактор надежности функционирования системы привода при оценке экономической эффективности
В связи с этим применение рекомендуемой системы привода позволяет значительно снизить ущерб от простоев подъемной установки, которая определяется по формуле

где М(у)- математическое ожидание убытков от простоев ШПУ в результате отказов системы привода;
 - коэффициент, учитывающий затраты на дополнительные ремонты, принимается равным 1,03-1,08;
- коэффициент, учитывающий затраты на дополнительные ремонты, принимается равным 1,03-1,08;
 - коэффициент, учитывающий долю условно-постоянных расходов в себестоимости продукции, принимается равным 0,4;
- коэффициент, учитывающий долю условно-постоянных расходов в себестоимости продукции, принимается равным 0,4;
Су- себестоимость одной тонны добываемого угля, по данным АО «УК Кузнецкуголь» принимается равной 850-900 руб./т;
КИ - коэффициент использования подъемной установки, принимается равным 0,45;
 - годовая производительность подъема, т/год;
- годовая производительность подъема, т/год;
 - параметр потока отказов системы привода, 1/ч;
- параметр потока отказов системы привода, 1/ч;
 - среднее время простоев ШПУ в результате возникновения одного
- среднее время простоев ШПУ в результате возникновения одного
отказа в системе привода, принимается равным 0,74 ч;
 -коэффициент влияния технологических связей, принимается равным
-коэффициент влияния технологических связей, принимается равным
,72
Годовая производительность подъемной машины
где Т - чистое время подъема;- грузоподъемность скипа;- продолжительность работы машины в сутки, принимается равной 15 ч; N - количество рабочих дней в году составляет 365.
 т/год.
т/год.
Ущерб от простоев подъемной установки с релейно-контакторном системой управления
 руб /год. Ущерб от простоев подъемной установки с АВК
руб /год. Ущерб от простоев подъемной установки с АВК
 руб/год.
руб/год.
Ущерб от простоев подъемной установки с тиристорным асинхронным приводом со смешанным управлением двигателя ШПУ
 руб /год.
руб /год.
При всех прочих равных условиях ущерб от простоев подъема с тиристорным асинхронным приводом почти в 10 раз меньше, чем с реостатным и в 4 раза но сравнению с АВК.
5.2 Определение экономических показателей проектируемой системы привода
Определение экономического эффекта от применения автоматизированного тиристорного асинхронного привода на шахтных подъемах выполняется в сравнении его экономических показателей с аналогичными показателями АВК и реостатного привода с релейно-контакторной схемой управления асинхронным двигателем как базового варианта.
Определяется экономический эффект от применения тиристорного привода по формуле

где  - суммарные затраты сравниваемой системы привода (тиристорного привода или АВК) и реостатного привода принятого за базовый вариант;
- суммарные затраты сравниваемой системы привода (тиристорного привода или АВК) и реостатного привода принятого за базовый вариант;
 - соответственно убытки от простоев в результате отказов электросилового оборудования сравниваемой системы привода и базового варианта.
- соответственно убытки от простоев в результате отказов электросилового оборудования сравниваемой системы привода и базового варианта.
Суммарные затраты определяются по формуле
где Э - эксплуатационные расходы по основным элементам, руб/год; К - К - капитальные затраты, руб;
К- капитальные затраты
Ен- нормативный коэффициент окупаемости капиталовложений, по
данным кафедры «Экономика и управление горными предприятиями»
(ЭиУГП) принимается равным 0,15.
Для реостатного подъема -  =677626руб/год;
=677626руб/год;  =499600руб.
=499600руб.
Для АВК -  =550682руб/год;
=550682руб/год;  =705406руб.
=705406руб.
Для тиристорного асинхронного привода -  =521172руб/год;
=521172руб/год;
 = 523020руб.
= 523020руб.
Суммарные затраты системы реостатного управления
 руб.
руб.
Суммарные затраты системы АВК.
 руб.
руб.
Суммарные затраты системы тиристорного привода
 руб.
руб.
Определяется экономический эффект от применения АВК
 руб.
руб.
Определяется экономический эффект от применения тиристорного привода
 руб.
руб.
Расчет сроков окупаемости дополнительных капиталовложений производится по выражению
где  - суммарные капиталовложения соответственно в базовый вариант м рассматриваемый привод, руб.;
- суммарные капиталовложения соответственно в базовый вариант м рассматриваемый привод, руб.;
 - затраты, учитывающие эксплуатационные расходы и ущерб от простоев сравниваемых систем приводов, руб./год.
- затраты, учитывающие эксплуатационные расходы и ущерб от простоев сравниваемых систем приводов, руб./год.
Для реостатного  = 1236892руб/год, для АВК
= 1236892руб/год, для АВК  - 740174 руб./год
- 740174 руб./год
Расчет сроков окупаемости дополнительных капиталовложений для системы АВК
 года.
года.
Расчет сроков окупаемости дополнительных капиталовложений для системы тиристорного электропривода
 года.
года.
Для системы тиристорного электропривода величину срока окупаемости дополнительных капиталовложений принимаем равной 0. так как капиталовложения в тиристорный привод меньше, чем в реостатный.
Стоимость электрооборудование тиристорного привода ниже, чем двух
других систем. Более низкие затраты на оборудование тиристорного привода связаны с применение мощных современных тиристоров, имеющих невысокую стоимость. Применение АВК связано с большими капитальными затратами, так как в этом случае необходимы дорогостоящие преобразователи серии ПАВК. Сравнение эксплуатационных расходов по элементам показывает, что заработная плата обслуживающего персонала при тиристорном приводе за счет применения более надежных средств автоматизации и тиристорной схеме управления двигателем, выполненных на бесконтактных элементах, значительно ниже, чем при реостатном и АВК; автоматизированные отчисления распределяются соответственно затратам по стоимости электрооборудования; стоимость электроэнергии за год при применении АВК ниже, чем при тиристорном и реостатном приводах, В целом по суммарным эксплуатационным расходам и уровню капиталовложений наиболее выгодным является применение тиристорного привода.
Экономический эффект от внедрения этого привода на подъемах с мощностью асинхронного двигателя 800 кВт в сравнении с реостатным составляет 701тыс. руб., а с АВК составляет 236 тыс. руб..
Из приведенного анализа следует, что тиристорный асинхронный привод со смешанным управлением асинхронным двигателем может быть рекомендован, при проектировании и реконструкции подъемов.
В качестве САР скорости рекомендованы к применению ПИ-регуляторы.
Заключение
В ходе проведённых расчётов курсового проекта была рассмотрена и анализирована схема тиристорного привода со смешанным управлением асинхронным двигателем шахтной подъёмной установки.
По исходным данным, предоставленным для расчёта, была построена тахограмма и диаграмма движущих усилий. Выбран асинхронный двигатель типа АКН2-18-43-20, который в наибольшей степени соответствует требуемым характеристикам ШПУ. Для осуществления пуска при высокой плавности регулирования скорости, применяются 2 пусковых сопротивления в цепи ротора.
Для корректирования статической и астатической систем были выбраны корректирующие устройства и рассчитаны их параметры.
На основании полученных данных были построены переходные характеристики САР ШПУ.
Из приведенного экономического анализа следует, что в целом по суммарным эксплуатационным расходам и уровню капиталовложений наиболее выгодным является применение тиристорного привода. Тиристорный асинхронный привод со смешанным управлением асинхронным двигателем может быть рекомендован при проектировании и реконструкции подъемов.