 2020-04-20
2020-04-20 428
428
Цель работы
Практическое освоение методики исследования переходных режимов функционирования САУ на структурных моделях и приобретение соответствующих знаний о влиянии параметров исследуемой системы на основные показатели качества управления.
4.1 Основные сведения
Исследование САУ заданной структуры в переходном режиме соответствующем реакции на одно из типовых воздействий, проводится с целью оценки показателей качества процессов управления и определения зависимости этих показателей от вариации параметров.
К типовым воздействиям при исследовании САУ относятся следующие функции:
- ступенчатая  ,
,
линейная  ,
,
квадратичная  ,
,
гармоническая  .
.
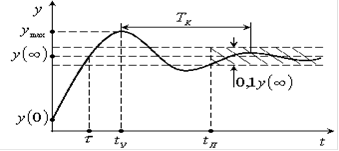
Рис. 4.1. Определение показателей качества по переходной функции
Обычно качество процессов управления оценивается по реакции системы на ступенчатое воздействие, т.е. по переходной функции, которая в общем случае имеет вид, показанный на рис. 4.1. При этом качество управления в переходном режиме характеризуется следующими показателями:
1. Начальное значение  , определяемое выражением
, определяемое выражением
 .
.
. Установившееся значение  , определяемое выражением
, определяемое выражением
 .
.
. Перерегулирование  , определяемое выражением
, определяемое выражением
 ,
,
где  - максимальное значение регулируемой величины.
- максимальное значение регулируемой величины.
. Время первого согласования  , исчисляемое от начала процесса до момента, когда регулируемая величина впервые становится равной установившемуся значения.
, исчисляемое от начала процесса до момента, когда регулируемая величина впервые становится равной установившемуся значения.
. Время установления  , определяемое как время достижения переходной функции первого максимума.
, определяемое как время достижения переходной функции первого максимума.
. Время переходного процесса  , отсчитываемое с момента приложения к системе воздействия до момента, после которого в интервале
, отсчитываемое с момента приложения к системе воздействия до момента, после которого в интервале  выполняется условие
выполняется условие
 .
.
. Частота колебаний  , определяемая выражением
, определяемая выражением

где  - "период" колебаний.
- "период" колебаний.
. Колебательность системы  , определяемая числом максимумов или минимумов в течение переходного процесса, т.е.
, определяемая числом максимумов или минимумов в течение переходного процесса, т.е.
 .
.
Основными показателями качества в рассматриваемом режиме функционирования САУ являются перерегулирование и время переходного процесса .
Определение отмеченных показателей качества предполагает анализ переходной функции исследуемой системы, методы получения которой делятся на следующие основные группы:
аналитические, графические и графоаналитические методы решения дифференциальных уравнений САУ, из которых наибольшее распространение получил операторный метод на основе преобразования Лапласа;
частотные методы, наиболее известным из которых является метод использования вещественных частотных характеристик;
метод математического моделирования.
Рассматриваемый в данной работе, метод математического моделирования, реализуемый средствами цифровой вычислительной техники, при наличии развитого программного обеспечения значительно снижает трудоемкость и повышает эффективность проводимых исследований.
4.2 Порядок выполнения работы
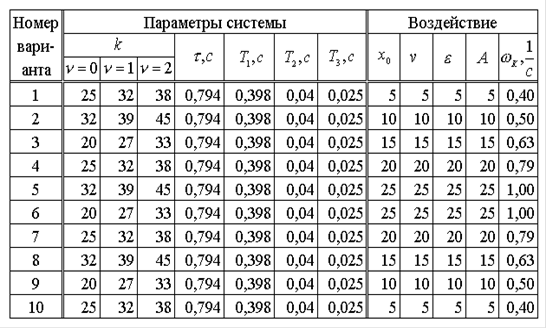
Перед началом работы следует получить у преподавателя номер варианта параметров исследуемой системы.
. Получение переходной функции при заданных значениях параметров исследуемой системы
а) Создайте структуру исследуемой системы, на вход которой подается единичное ступенчатое воздействие. Задайте требуемые значения параметров.
б) Проведите имитационное моделирование, подобрав время решения, исходя из получения на экране переходной функции исследуемой системы. Напечатайте график и определите по нему показатели качества процесса управления.
в) Получите и напечатайте график изменения указанных преподавателем промежуточных величин моделируемой системы.
. Получение зависимости основных показателей качества от изменения добротности исследуемой системы
а) Изменяя коэффициент передачи прямой цепи  и оставляя неизменными прочие параметры системы, установите такое его значение, при котором визуально наблюдается заметное изменение переходной функции.
и оставляя неизменными прочие параметры системы, установите такое его значение, при котором визуально наблюдается заметное изменение переходной функции.
По полученной переходной функции определите основные показатели качества, т.е. перерегулирование  и время переходного процесса
и время переходного процесса  . Время удобно определять, пользуясь выводом результатов моделирования в таблицу.
. Время удобно определять, пользуясь выводом результатов моделирования в таблицу.
б) Проанализируйте качественно влияние изменения параметра  на указанные преподавателем промежуточные величины моделируемой системы.
на указанные преподавателем промежуточные величины моделируемой системы.
в) Подобным образом получите три - пять переходных функций, отличающихся друг от друга и дающих представление основных показателей качества и промежуточных величин от изменяемого параметра  системы.
системы.
г) Постройте зависимость перерегулирования и времени переходного процесса от изменяемого параметра.
д) Установите номинальное значение изменяемого параметра, обеспечивающее исходный вид переходной функции.
. Получение зависимости основных показателей качества от изменения коэффициента передачи цепи положительной прямой связи. Выполните п.2, изменяя коэффициент передачи демпфирующего трансформатора  аналогично изменению коэффициента передачи .
аналогично изменению коэффициента передачи .
. Получение зависимости основных показателей качества от изменения коэффициента передачи  цепи гибкой обратной связи.
цепи гибкой обратной связи.
Выполните п.2, изменяя коэффициент передачи  аналогично изменению коэффициента передачи прямой цепи .
аналогично изменению коэффициента передачи прямой цепи .
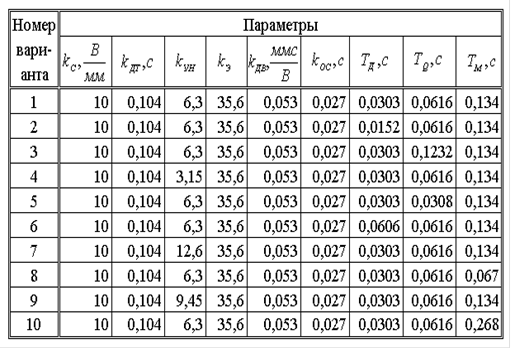
4.3 Варианты заданий
В данной работе исследуются переходные режимы работы следящей системы копировально-фрезерного станка, структурная схема которой приведена на рис. 4.2. Исходные данные для моделирования указанной системы приведены в табл. 4.1.
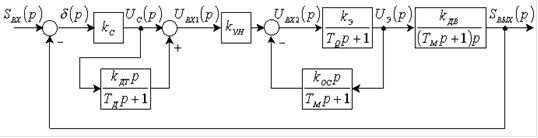
Рис. 4.2. Структурная схема исследуемой системы
Таблица 4.1
Содержание отчета по работе
. Цель работы.
. Схема исследованной системы с числовыми значениями параметров и экспериментально полученные графики.
. Ответы на контрольные вопросы.
Контрольные вопросы
. Какие воздействия являются типовыми при исследовании САУ?
. По реакции на какое воздействие оценивается качество процессов управления?
. Какими показателями характеризуется качество процессов управления в переходных режимах работы САУ?
. Какие показатели качества являются основными?
. Какими методами можно получить переходную функцию исследуемой системы для анализа качества процессов управления?
. Как зависит вид переходной функции исследуемой системы от изменения её добротности?
. Как зависят основные показатели качества исследуемой системы от коэффициента передачи цепи положительной прямой связи?
. Как зависят основные показатели качества исследуемой системы от коэффициента передачи цепи гибкой обратной связи?
. Как зависит вид указанных преподавателем промежуточных величин моделируемой системы от изменения добротности и коэффициентов передачи положительной и отрицательной обратной связи?
. Изменение какого из исследуемых параметров системы оказывается наиболее сильно на её устойчивости?
ЛАБОРАТОРНАЯ РАБОТА № 5. ОЦЕНКА ТОЧНОСТИ УСТАНОВИВШЕГОСЯ РЕЖИМА В ЗАВИСИМОСТИ ОТ ПОРЯДКА АСТАТИЗМА СИСТЕМ УПРАВЛЕНИЯ
Цель работы
Исследование точности установившихся режимов функционирования САУ в зависимости от порядка их астатизма экспериментальным методом цифрового имитационного моделирования и аналитическим расчетом.
Основные сведения
Исследование САУ в установившемся режиме, соответствующем реакции на одно из типовых воздействий после затухания переходного процесса, проводится с целью вычисления ошибки, характеризующей точность функционирования, а следовательно и качество процессов управления в рассматриваемом режиме.
При этом, в зависимости от вида типового воздействия, установившиеся режимы делятся на:
- статические, обусловленные постоянными во времени воздействиями вида  , под действием которых система приходит в состояние покоя.
, под действием которых система приходит в состояние покоя.
динамические, при которых приложенные к системе воздействия изменяются по некоторому закону вида  ,
,  ,
,  и обуславливают режим установившего вынужденного движения.
и обуславливают режим установившего вынужденного движения.
Искомое значение ошибки для рассмотренных типовых воздействий, за исключением гармонического, можно определить, пользуясь теоремой о конечном значении
 , (5.1)
, (5.1)
где  ,
,  ,
,  - соответственно оригиналы и изображение ошибки,
- соответственно оригиналы и изображение ошибки,  - изображение воздействия
- изображение воздействия  ,
,  - передаточная функция исследуемой системы по ошибке.
- передаточная функция исследуемой системы по ошибке.
Передаточная функция по ошибке САУ, структура которой в общем виде приведена на рис. 5.1, определяется выражением
 ,
,
где  - передаточная функция разомкнутой системы, полученная через коэффициенты
- передаточная функция разомкнутой системы, полученная через коэффициенты  ,
,  ,
,  ,
,  ,
,  дифференциального уравнения при
дифференциального уравнения при  ;
;  ,
,  .
.
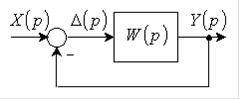
Рис. 5.1. Общий вид структуры исследуемой системы
После подстановки этого выражения в (5.1), имеем
 . (5.2)
. (5.2)
Анализ полученной зависимости позволяет оценить качество процессов управления статических и астатических САУ в статическом, при изображении ступенчатого воздействия  , и динамическом, при изображениях степенных функций времени
, и динамическом, при изображениях степенных функций времени  ,
,  , режимах. Эта оценка дает следующие значения статических
, режимах. Эта оценка дает следующие значения статических  и динамических
и динамических  ,
,  ошибок:
ошибок:
для статических систем ( )
)
 ,
,  ,
,  ;
;
для астатических систем первого порядка ( ,
,  )
)
 ,
,  ,
,  ;
;
для астатических систем второго порядка ( ,
,  )
)
,  ,
,  .
.
Возможные случаи изменения ошибок иллюстрируются рис. 5.2.
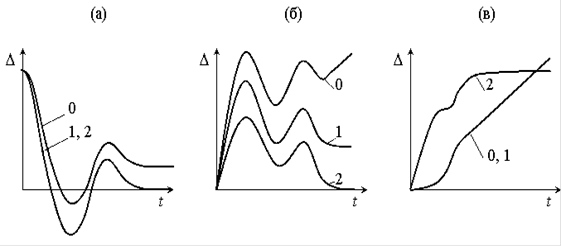
Рис. 5.2. Графики ошибок при ступенчатом (а), линейном (б) и квадратичном (в) воздействиях: 0 - нулевой астатизм; 1 - астатизм первого порядка; 2 - астатизм второго порядка
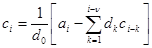
Для определения значения расходящейся ошибки в любой момент времени из интервала ( ) передаточную функцию по ошибке представим в виде ряда
) передаточную функцию по ошибке представим в виде ряда  , что позволяет определить ошибку в следующем виде:
, что позволяет определить ошибку в следующем виде:
 (5.3)
(5.3)
При этом коэффициенты разложения  определяются, исходя из выражения для передаточной функции по ошибке
определяются, исходя из выражения для передаточной функции по ошибке
 (5.4)
(5.4)
или рекуррентной формулой через коэффициенты передаточной функции разомкнутой системы
 , (5.5)
, (5.5)
где  - порядок астатизма.
- порядок астатизма.
Динамическая ошибка при гармоническом воздействии  , где
, где  - частота качки, изменяется по закону воздействия, т.е. имеет периодический характер. Поэтому при оценке качества процессов управления в установившемся гармоническом режиме достаточно оценить амплитудное значение искомой динамической ошибки. Это наиболее просто осуществляется по частотным характеристикам исследуемой САУ, исходя из выражения
- частота качки, изменяется по закону воздействия, т.е. имеет периодический характер. Поэтому при оценке качества процессов управления в установившемся гармоническом режиме достаточно оценить амплитудное значение искомой динамической ошибки. Это наиболее просто осуществляется по частотным характеристикам исследуемой САУ, исходя из выражения
 , (5.6)
, (5.6)
где  - модуль передаточной функции разомкнутой системы на частоте
- модуль передаточной функции разомкнутой системы на частоте  ,
,  - период качки.
- период качки.
Очевидно, что определяется либо аналитически, либо из ЛАХ разомкнутой системы.
Приведенные выше выражения для статических и динамических ошибок в установившемся режиме позволяют сделать заключение о зависимости точности функционирования САУ в рассматриваемом режиме от величина воздействий, структуры и параметров исследуемой системы. При этом повышение порядка астатизма системы управления увеличивает её точность, снижает устойчивость.
5.2 Порядок выполнения работы
Перед началом работы следует получить у преподавателя номер варианта параметров исследуемых САУ.
. Анализ точности функционирования статической системы
а) В Simulink создайте структуру замкнутой САУ (с единичной обратной связью), на вход которой подаётся заданное ступенчатое воздействие, а передаточная функция прямой цепи соответствует заданной передаточной функции разомкнутой системы. Задайте требуемые значения параметров.
б) Проведите имитационное моделирование, подобрав время решения исходя из полученных на экране графиков ошибки выходной величины исследуемой системы в установившемся режиме.
в) Напечатайте график ошибки и определите по нему ошибку установившегося режима, пользуясь выводом результатов моделирования в таблицу.
г) Отредактируйте структуру исследуемой системы, подав на её вход заданное линейно возрастающее воздействие.
д) Выполните п. "б".
е) Нанесите на полученный в п. "в" график новые значения ошибки в узловых точках, постройте график.
ж) Отредактируйте структуру исследуемой системы, подав на её вход заданную квадратичную функцию времени. Следует иметь в виду, что при подаче данного воздействия величину скачка по ускорению устанавливают равной удвоенному значению  , приведенного в табл. 5.1 для выполняемого варианта.
, приведенного в табл. 5.1 для выполняемого варианта.
з) Выполните п.п. "б" и "е".
и) Используя выражение (5.2), рассчитайте аналитически значение ошибки в установившемся режиме. В случае расходящейся ошибки определите коэффициенты ошибок по (5.4) или (5.5) и, используя (5.3), определите значение ошибки в произвольный момент времени. Сравните полученные результаты с экспериментальным данными.
к) Отредактируйте структуру исследуемой системы, подав на её вход заданное гармоническое воздействие.
л) Выполните п.п. "б" и "в".
м) Получите и напечатайте ЛЧХ исследуемой системы.
н) Используя выражение (5.6), рассчитайте значение ошибки в установившемся режиме, определив  сначала аналитически, а затем по ЛАХ, полученной в предыдущем пункте. Сравните полученные результаты с экспериментальными данными.
сначала аналитически, а затем по ЛАХ, полученной в предыдущем пункте. Сравните полученные результаты с экспериментальными данными.
. Анализ точности функционирования астатической системы первого порядка
Выполните п. 1 для структуры, соответствующей исследуемой системы с астатизмом первого порядка.
. Анализ точности функционирования астатической системы второго порядка
Выполните п. 1 для структуры, соответствующей исследуемой системе с астатизмом второго порядка.
5.3 Варианты заданий
В данной работе исследуется точность установившихся режимов статической, а также астатических систем первого и второго порядка.
Передаточные функции исследуемых систем в общем виде определяются следующим образом:
 .
.
Исходные данные для моделирования указанных систем приведены в табл. 5.1.
Таблица 5.1
5.4 Содержимое отчета по работе
. Цель работы.
. Структурные динамические схемы исследованных систем, их передаточные функции с числовыми значениями параметров, экспериментально полученные графики и результаты аналитических расчетов.
. Ответы на контрольные вопросы.
5.5 Контрольные вопросы
. Какие виды установившихся режимов имеют место в САУ?
. Какая теорема позволяет определить конечное значение ошибки в установившемся режиме?
. Как определяется установившееся значение расходящейся ошибки в произвольный момент времени?
. Каким образом связаны между собой передаточная функция разомкнутой САУ и её передаточная функция по ошибке?
. Какими способами можно определить коэффициенты ошибок?
. Какие системы обладают большей точностью в статическом установившемся режиме?
. Каков необходимый порядок астатизма САУ для обеспечения нулевой динамической ошибки при воздействии в виде квадратичной функции времени?
. Каков порядок астатизма САУ, обеспечивающий устойчивый динамический режим функционирования при линейно возрастающем воздействии?
. Какими способами можно определить динамическую ошибку при гармоническом воздействии?
. В каком соотношении находятся точность САУ в установившемся режиме и её устойчивость?
ЛАБОРАТОРНАЯ РАБОТА № 6. ИССЛЕДОВАНИЕ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ С ЗАПАЗДЫВАНИЕМ
Цель работы
Определение влияния величины запаздывания на устойчивость систем управления на основе структурных преобразований исследуемой системы в зависимости от места нахождения звена с запаздыванием.
Основные сведения
Системы с запаздыванием отличаются от обычных линейных САУ отличием одного или нескольких звеньев, величина на выходе которых  начинает меняться при изменении величины на входе
начинает меняться при изменении величины на входе  с некоторой постоянной временной задержкой
с некоторой постоянной временной задержкой  , т.е.
, т.е.  .
.
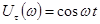
Подобные звенья с "чистым" запаздыванием имеют передаточную функцию вида
 ,
,
которой соответствует комплексный коэффициент передачи
 ,
,
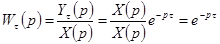
а частотные характеристик определяются выражениями
 ,
,  ,
,  .
.
 ,
,  .
.
Таким образом, АФХ звена с запаздыванием представляет собой круг единичного радиуса на комплексной плоскости  с центром в начале координат, ЛАХ имеет нулевое значение и инвариантна к изменениям частоты, а ЛФХ неограниченно убывает с увеличением частоты.
с центром в начале координат, ЛАХ имеет нулевое значение и инвариантна к изменениям частоты, а ЛФХ неограниченно убывает с увеличением частоты.
При последовательном включении звена с запаздыванием вместе с обычными динамическими звеньями передаточная функция и комплексный коэффициент передачи разомкнутой системы будут
 ,
,  , (6.1)
, (6.1)
где  ,
,  ,
,  - соответственно передаточная функция, амплитудная и фазовая частотные характеристики разомкнутой системы без учета запаздывания.
- соответственно передаточная функция, амплитудная и фазовая частотные характеристики разомкнутой системы без учета запаздывания.
Следовательно, системы, отличающиеся друг от друга лишь величиной запаздывания, имеют одинаковые амплитудные и различные фазовые характеристики. При этом большей величине запаздывания соответствует больший фазовый сдвиг на частоте среза системы, что приводит к ухудшению её устойчивости.
Устойчивость системы с запаздыванием определяется с помощью критерия Найквиста по передаточной функции и комплексному коэффициенту передачи исследуемой системы в виде (6.1). Это требует структурных преобразований исходной системы в зависимости от места нахождения звеньев с запаздыванием.
Так, если данное звено включено в прямую цепь, то при размыкании главной обратной связи (см. рис. 6.1,а)
 ,
,
где  - коэффициент передачи звена с запаздыванием.
- коэффициент передачи звена с запаздыванием.
Если же звено запаздывания включено в местную обратную связь, то (см. рис. 6.1,б)
 ,
,
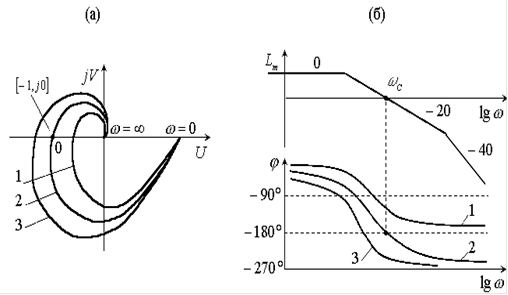
Рис. 6.1. АФХ (а) и ЛЧХ (б) САУ: 1 -  ; 2 -
; 2 -  ; 3 -
; 3 - 
что соответствует размыканию местной обратной связи.
Формулировка критерия Найквиста для систем с запаздыванием меняется. Однако в рассматриваемых системах явления устойчивости и неустойчивости чередуются при непрерывном изменении .
Для определения условий устойчивости вводится понятие критического времени запаздывания  , которое определяется из равенства фазовой частотной характеристики разомкнутой системы на частоте среза
, которое определяется из равенства фазовой частотной характеристики разомкнутой системы на частоте среза  величине
величине  , т.е. (см. рис. 6.2)
, т.е. (см. рис. 6.2)
 .
.
Отсюда определяем
 , (6.2)
, (6.2)
где  определяется из условия
определяется из условия  .
.
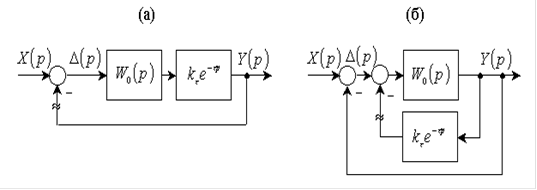
Рис. 6.2 Структурные преобразования исследуемой системы с размыканием главной (а) и местной (б) обратной цепи
6.2 Порядок выполнения работы
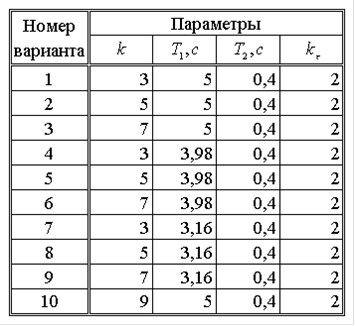
Перед началом работы следует получить у преподавателя номер варианта параметров исследуемой САУ (табл. 6.1).
. Определение критического времени запаздывания
а) В Simulink создайте структуру, соответствующую рис. 6.2,а при  , т.е. при отсутствии звена с запаздыванием. Задайте требуемые значения параметров.
, т.е. при отсутствии звена с запаздыванием. Задайте требуемые значения параметров.
б) Проведите имитационное моделирование, подобрав время решения исходя из полученного на экране графика переходного процесса. Напечатайте его.
в) Получите и напечатайте ЛЧХ и АФХ исследуемой разомкнутой структуры, по которой определите частоту среза и запас по фазе на этой частоте. При этом график АФХ напечатайте вблизи критической точки.
г) По выражению (6.2) рассчитайте критическое время запаздывания.
д) Определите критическое время запаздывания аналитическим путём, используя экспериментально полученное значение  . Сравните результаты.
. Сравните результаты.
. Определение временных и частотных характеристик исследуемой САУ при наличии звена с запаздыванием в прямой цепи
а) Введите звено с запаздыванием в исследуемую структуру в соответствии с рис. 6.2,а.
б) Изменяя значение при  , подберите такое его значение, при котором визуально наблюдается заметное изменение переходной функции. Нанесите на полученный в п. 1,б график новые значения переходной функции в узловых точках. Постройте график.
, подберите такое его значение, при котором визуально наблюдается заметное изменение переходной функции. Нанесите на полученный в п. 1,б график новые значения переходной функции в узловых точках. Постройте график.
в) Нанесите на полученные в п. 1,в в характеристики новые значения частотных характеристик. Постройте графики.
г) Выполните п. "б" и "в" для  .
.
д) Выполните п. "б" и "в" для  .
.
. Определение временных и частотных характеристик исследуемой САУ при наличии звена с запаздыванием в цепи местной обратной связи
Выполните п. 1 и п. 2 для структуры, изображенной на рис. 6.2,б.
Варианты заданий
В данной работе исследуется влияние величины запаздывания на устойчивость системы управления при наличии в ней звена с запаздыванием как в прямой цепи, так и в цепи местной обратной связи.
При этом исходная разомкнутая система без запаздывания представляет собой последовательное соединение двух апериодических звеньев, т.е. имеет передаточную функцию
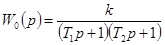 .
.
Исходные данные для моделирования данной передаточной функции приведены в табл. 6.1.
Таблица 6.1
6.4 Содержание отчета по работе
. Цель работы.
. Схемы исследованных систем, их передаточные функции с числовыми значениями параметров, экспериментально полученные графики и результаты аналитических расчетов.
. Ответы на контрольные вопросы.
6.5 Контрольные вопросы
. Чем отличаются системы с запаздыванием от обычных линейных систем?
. Какова зависимость выходной величины звена с "чистым" запаздыванием от его входной величины?
. Как записывается передаточная функция звена с запаздыванием?
4. Какой вид имеют частотные характеристики звена с запаздыванием?
. Каково влияние запаздывания на ЛЧХ исследуемой САУ?
. Каково влияние запаздывания на АФХ исследуемой САУ?
. С помощью какого критерия определяется устойчивость систем с запаздыванием?
. Зависит ли устойчивость САУ от расположения звена запаздывания в исследуемой структуре?
. Что называется критическим временем запаздывания?
10. Как определяется критическое время запаздывания?
СПИСОК ЛИТЕРАТУРЫ
1. Бесекерский В. А., Попов Е. П. Теория систем автоматического управления. - СПб.: Изд-во "Профессия", 2003. - 752 с.
2. Воронов А. А. Основы теории автоматического управления. - М.: Высшая школа. - Часть I. - 1986.
3. Дьяконов В. Simulink 4. Специальный справочник. - СПб: Питер, 2002.
4. Епишкин А. Е. Исследование динамических процессов в системе MATLAB - Simulink. Методические указания. СПб., 2004. - 32 с.
. Первозванский А. А. Курс теории автоматического управления. - М.: Наука, 1986. - 616 с.
. Цыпкин Я. З. Основы теории автоматических систем. - М.: Наука, 1977. - 559 с.








