 2020-04-12
2020-04-12 550
550Задание
Разработать схему манипулятора (руки с кистью и схватом) промышленного робота, обеспечивающего автоматический ввод объекта (заготовки, детали, сборочной единицы) из исходного положения объекта (табл. 1) во вторичное (табл. 2), обосновать выбор сочленений и приводов всех звеньев. Сравнить прямоугольную, цилиндрическую и сферическую системы координат.
Таблица 1
Исходное положение объекта
| Последняя цифра шифра | Х1, мм | У1, мм | Z 1, мм | φx1, град | φy1, град | φz1, град |
| 3 | -800 | -700 | 450 | 90 | 0 | 90 |
Таблица 2
Вторичное положение объекта в позиции переработки машины-автомата
| Предпоследняя цифра шифра | Х2, мм | У2, мм | Z 2, мм | φx2, град | φy2, град | φz2, град |
| 3 | 800 | 600 | 800 | 90 | 0 | 90 |
Решение
Определение исходного и вторичного положения объекта.
Сначала определим, в какой точке пространства объект находится в начальный момент времени. На (Рис. 1) точкой М1 схематично представлен объект переработки, его положение мы определили по заданным в условии координатам из таблицы 1.
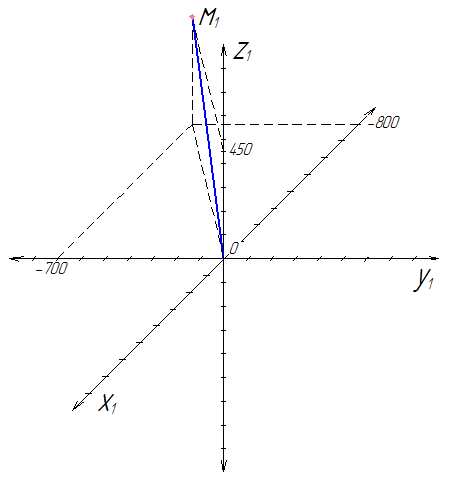
(Рис. 1)
Также по исходным данным из таблицы 2 определим положение объекта в позиции переработки машины-автомата. Результат изображён на (Рис. 2)
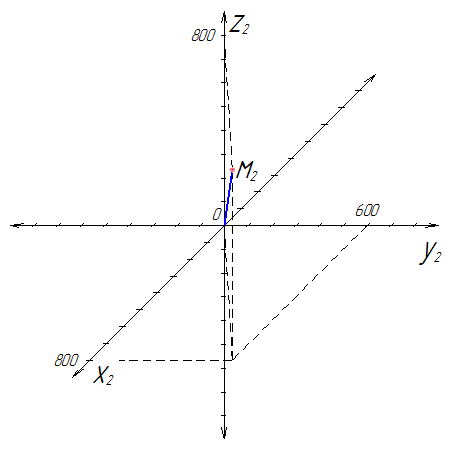
(Рис. 2)
В условии к заданию также указано, что объект в исходном и вторичном положении не меняет углы наклона по отношению к осям координат, соответственно:



Для выполнения этих трёх равенств необходимо расположить объект в обоих случаях параллельно оси Y. В УМК указано, что объект переработки имеет цилиндрическую форму, а значит, он имеет центральную осевую линию, т.е. в обоих случаях объект располагаются так, чтобы центральная осевая линия была параллельна оси Y. Схематично это показано на (Рис. 3).
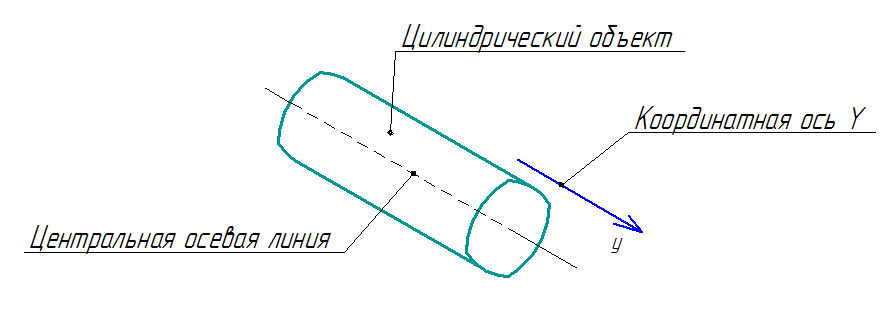
(Рис. 3)
Определим изменение положения объекта относительно осей абсцисс и ординат. На (Рис. 4) наглядно это отображено.
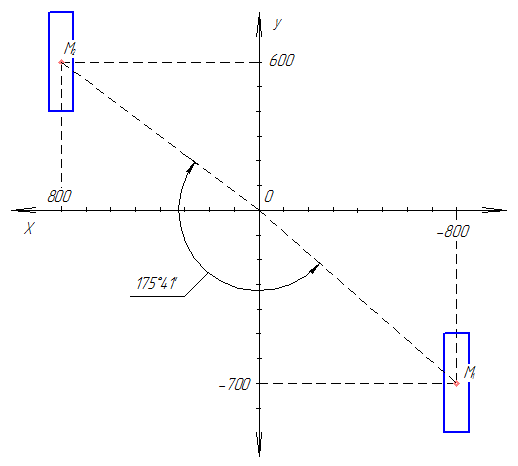
(Рис. 4)
Относительно оси Z изменение положения объекта переработки отображено на (Рис. 5).
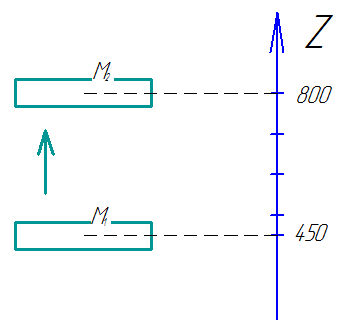
(Рис. 5)
При решении поставленной задачи необходимо выбрать одну из систем координат (прямоугольную, цилиндрическую или сферическую).
В прямоугольной системе координат все перемещения только поступательные.
В манипуляторах, работающих в цилиндрической системе координат, кроме поступательных перемещений, осуществляется одно угловое перемещение (по окружности).
В сферической системе координат осуществляется уже 2 угловых перемещения. Как правило, манипуляторы с такой системой координат сложнее, чем с цилиндрической системой.
На (Рис. 4) видно, что при перемещении из точки М1 в точку М2 совершается угловое перемещение. Соответственно декартова система координат не подходит для решения задачи. Воспользуемся цилиндрической системой координат, так как манипуляторы с такой системой проще, чем со сферической, хоть и менее компактны.
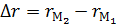
В манипуляторах, работающих в цилиндрической системе координат (Рис. 6), наряду с поступательными перемещениями, осуществляется одно угловое перемещение (по окружности). Соответственно рабочая зона ограничена цилиндрическими поверхностями.
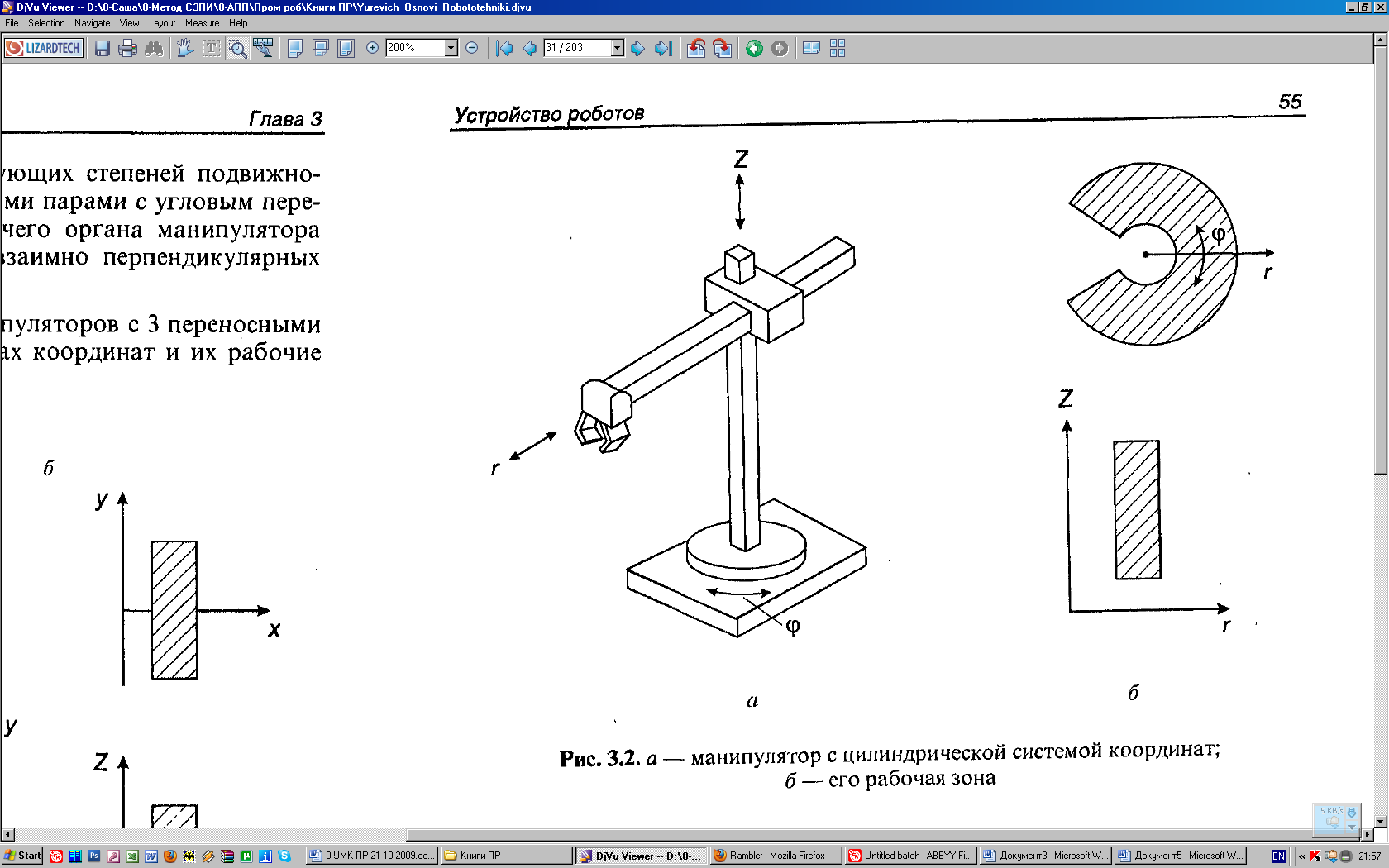
(Рис. 6).
Манипулятор с цилиндрической системой координат (а), его рабочая зона (б)
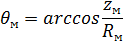
Для программирования перемещений требуется перерасчёт из декартовой xм, yм, zм в цилиндрическую систему координат rм, ɸм, zм.
Тогда величина перемещений звеньев манипулятора будет


Формулы для подсчётов взяты из учебно-методического комплекса по промышленным роботам со стр. 136.
Выполним расчёты:







Проведём расчёты для сферической системы координат:
В сферической системе координат осуществляется уже 2 угловых перемещения, и рабочая зона ограничена сферическими поверхностями. Такую систему координат имеет, например, манипулятор промышленного робота, показанного на (Рис. 7). Манипуляторы с такой системой координат, как правило, сложнее, чем с цилиндрической системой, однако компактнее.
| б |
| а |
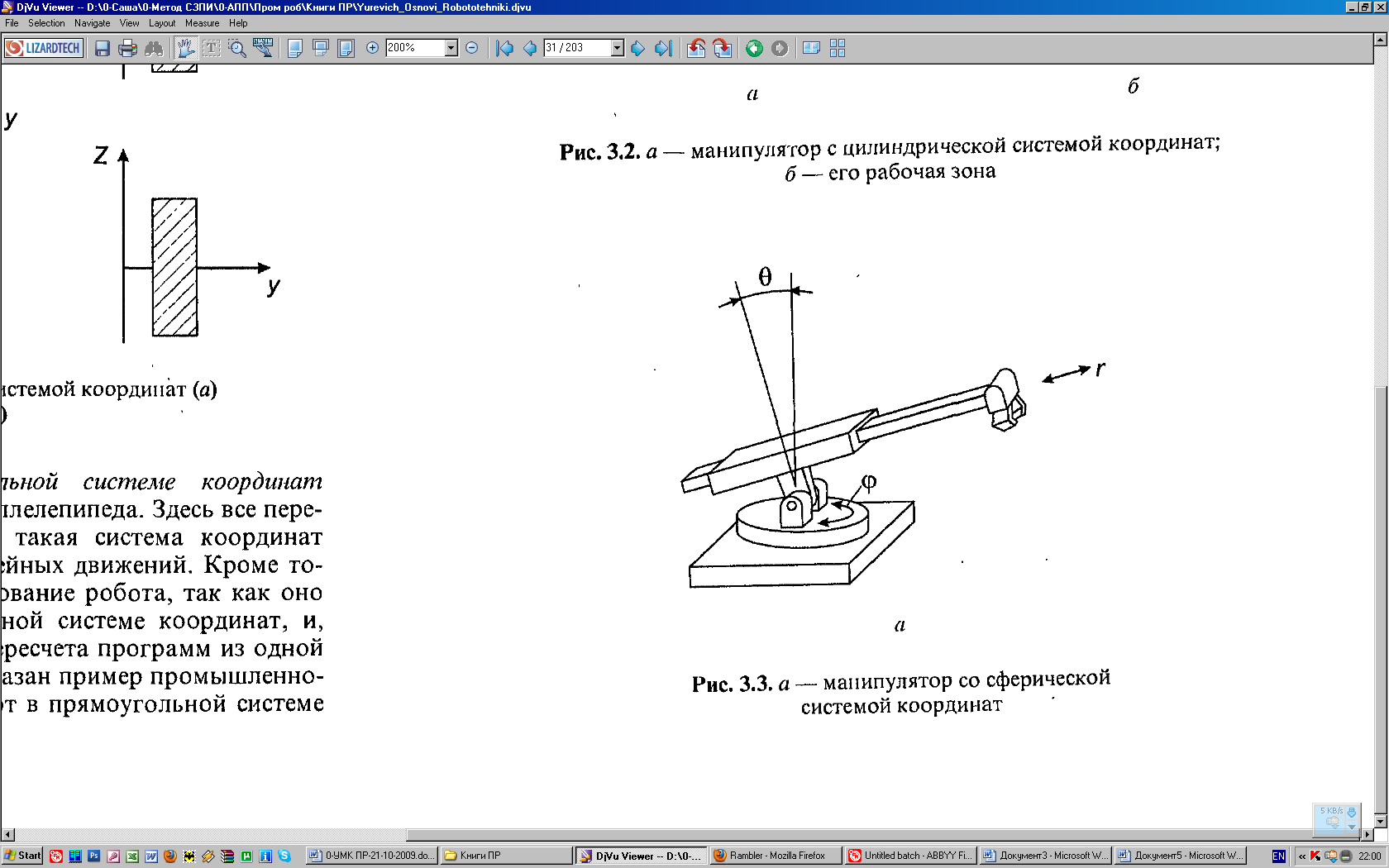
(Рис. 7).
Манипулятор с сферической системой координат (а) и его рабочая зона (б)
Как и для предыдущей системы координат, для программирования перемещений требуется перерасчёт из декартовой xм, yм, zм в сферическую систему координат 

Тогда величина перемещений звеньев манипулятора будет



Произведём эти расчёты:






В данной задаче (при условии решения её в цилиндрической системе координат) наименьшее количество действий, связанных с перемещением объекта для перехода из исходного положения во вторичное, равно 3.
Есть несколько алгоритмов последовательности этих действий, каждый из которых можно использовать в тех условиях, где он наиболее удобен. В данной работе рассмотрим один из них:
1. Манипулятор совершает угловое перемещение объекта, но не на 175о41’, как показано на (Рис. 4), а на 180о. Таким образом, цилиндрический объект переработки примет промежуточное положение М12, (Рис. 7).
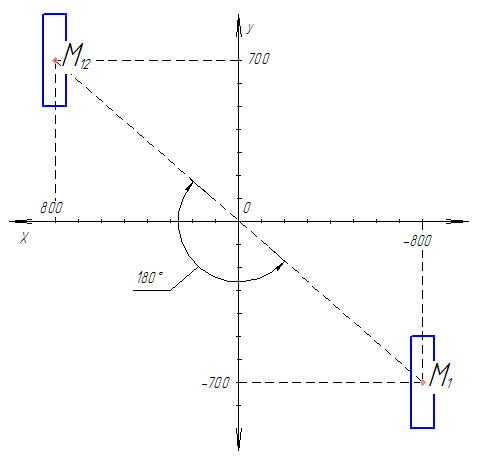
(Рис. 8)
2. На втором этапе совершается поступательное перемещение объекта вдоль оси Y, как показано на (Рис. 9).
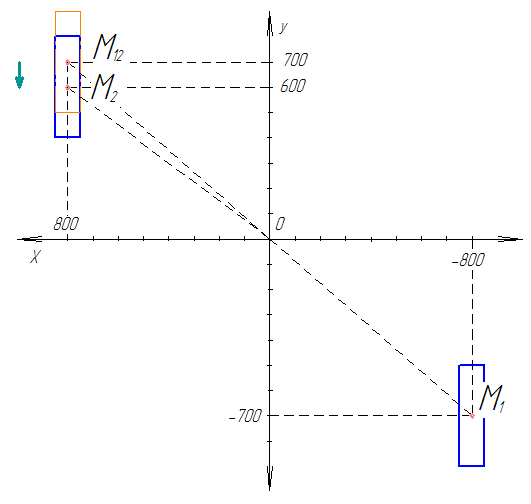
(Рис. 9)
 указывает направление поступательного движения.
указывает направление поступательного движения.
3. На третьем этапе остаётся лишь произвести поступательное перемещение объекта вдоль оси Z, как это показано на (Рис. 5).
Для решения задачи используем промышленного робота с трёхподвижным манипулятором, структурная и функциональная схемы которого изображены на (Рис. 9).
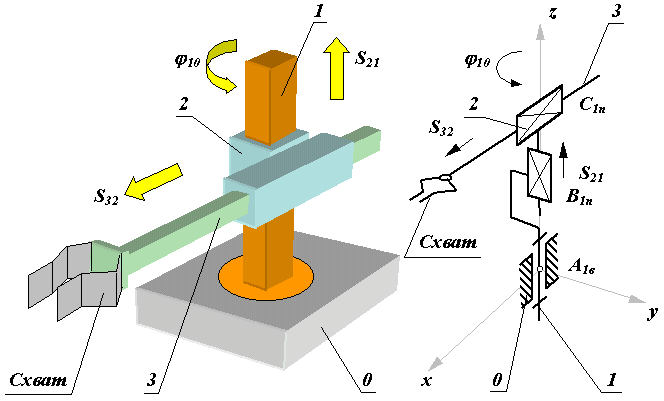
(Рис. 10)
Основной механизм руки данного манипулятора представляет собой неподвижное звено 0 и 3 подвижных звена 1, 2, 3.
Механизм данного манипулятора соответствует цилиндрической системе координат (также этот манипулятор и полностью соответствует тем требованиям, которые относятся к решению нашей задачи). В этой системе звено 1 может вращаться относительно звена 0 (относительное угловое перемещение φ10), звено 2 перемещается по вертикали относительно звена 1 (относительное линейное перемещение S21) и звено 3 перемещается в горизонтальной плоскости относительно звена 2 (относительное линейное перемещение S32). На конце звена 3 закреплён схват, предназначенный для захвата и удержания объекта манипулирования при работе манипулятора. Звенья основного рычажного механизма манипулятора образуют между собой 3 одноподвижные кинематические пары (одну вращательную А и две поступательные В и С) и могут обеспечить перемещение объекта в пространстве без управления его ориентацией.
Для выполнения каждого из трёх относительных движений манипулятор должен быть оснащён приводами, которые состоят из двигателей с редуктором и системы датчиков обратной связи. Так как движение объекта осуществляется по заданному закону движения, то в системе должны быть устройства, сохраняющие и задающие программу движения, которые называются программоносителями.
Таким образом, кинематическая схема манипулятора примет вид (Рис. 10):
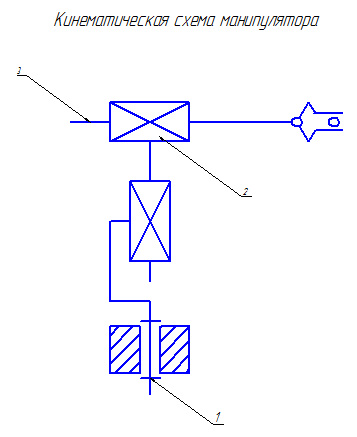
(Рис. 11)
Список использованной литературы
1. Кульчицкий А.А., Наумова А.К. Промышленные роботы: учебно-методический комплекс – СПб. Изд. СЗТУ, 2010 год.
2. Интернет-ресурс Википедия http://ru.wikipedia.org








