 2020-04-20
2020-04-20 154
154При определении динамических характеристик объекта по его кривой разгона на вход подается или ступенчатый пробный сигнал или прямоугольный импульс. Во втором случае кривая отклика должна быть достроена до соответствующей кривой разгона.
При снятии кривой разгона необходимо выполнить ряд условий:
1. Если проектируется система стабилизации, то кривая разгона должна сниматься в окрестности рабочей точки процесса.
2. Кривые разгона необходимо снимать как при положительных, так и отрицательных скачках управляющего сигнала. По виду кривых можно судить о степени асимметрии объекта. При небольшой асимметрии расчет настроек регулятора рекомендуется вести по усредненным значениям параметров передаточных функций. Линейная асимметрия наиболее часто проявляется в тепловых объектах управления.
3. При наличии зашумленного выхода желательно снимать несколько кривых разгона с их последующим наложением друг на друга и получением усредненной кривой.
4. При снятии кривой разгона необходимо выбирать наиболее стабильные режимы процесса, например, ночные смены, когда действие внешних случайных возмущений маловероятно.
5. При снятии кривой разгона амплитуда пробного входного сигнала должна быть, с одной стороны, достаточно большой, чтобы четко выделялась кривая разгона на фоне шумов, а, с другой стороны, она должна быть достаточно малой, чтобы не нарушать нормального хода технологического процесса.
Сняв кривую разгона, и оценив характер объекта управления (с самовыравниванием или без) можно определить параметры соответствующей передаточной функции. Передаточную функцию вида (1.5) рекомендуется применять для объектов управления с явно выраженной доминирующей постоянной времени (одноемкостный объект). Перед началом обработки кривую разгона рекомендуется пронормировать (диапазон изменения нормированной кривой 0-1) и выделить из ее начального участка величину чистого временного запаздывания.
Дана нормированная кривая разгона объекта, у которой заранее выделена величина чистого запаздывания  . График кривой разгона представлен на рисунке. 5.1.
. График кривой разгона представлен на рисунке. 5.1.
Динамический коэффициент усиления  объекта определяется как отношение приращения выходного сигнала к приращению входного в окрестности рабочей точки.
объекта определяется как отношение приращения выходного сигнала к приращению входного в окрестности рабочей точки.
Определение динамических характеристик объектов по кривой разгона можно производить двумя методами.
1) Метод касательной к точке перегиба кривой разгона. В данном случае точка перегиба соответствует переходу кривой от режима ускорения к режиму замедления темпа нарастания выходного сигнала.
Постоянная времени  и динамическое запаздывание
и динамическое запаздывание  определяются в соответствии с графиком рисунке.3.1, т.е.
определяются в соответствии с графиком рисунке.3.1, т.е.  .
.
2) Формульный метод позволяет аналитически вычислить величину динамического запаздывания и постоянной времени по формулам.

| (5.1) |
где значение  , берется в окрестности точки перегиба кривой, а значение
, берется в окрестности точки перегиба кривой, а значение  принимается равным 0,8 - 0,85. По этим значениям определяются и моменты времени
принимается равным 0,8 - 0,85. По этим значениям определяются и моменты времени  и
и  .
.
В данной работе для определения динамических характеристик был использован первый метод: метод касательной в точке перегиба кривой разгона.
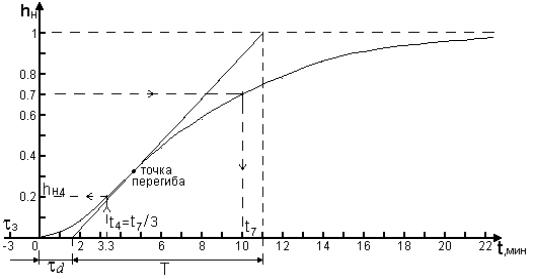
Рисунок 5.1 – График кривой разгона
Так как передаточная функция системы определяет ее динамические свойства, то первоначальная задача расчета САР сводится к определению ее передаточной функции.
По графикам переходных функций определяются коэффициенты усиления и передаточные функции по каналам возмущения. На рисунке 5.2 представлен пример переходного процесса.
 , ,
| (5.2) |
где  - коэффициент усиления, ºС/кг;
- коэффициент усиления, ºС/кг;
 - разность конечного и начального значений температур, ºС;
- разность конечного и начального значений температур, ºС;
 - разность конечного и начального значений расхода, кг.
- разность конечного и начального значений расхода, кг.

| (5.3) |
где - коэффициент усиления, ºС/кг;
 - постоянная времени, с.;
- постоянная времени, с.;
 - время запаздывания.
- время запаздывания.
Рисунок 5.2 – Пример переходного процесса
Для стабилизации температуры в печи принимаем систему, действующую по отклонению стабилизируемой величины от заданного значения (рисунок 5.7).
Рисунок 5.7 – Структурная схема системы автоматического регулирования температуры
ОУ – объект управления;
Х – возмущение (расход огарка);
Z – возмущение (расход угольной крошки);
U – возмущение (температура в наиболее горячей зоне печи);
G – управляющий сигнал (расход природного газа);
Y – выходной параметр объекта (температура на выходе из печи;
Yзад – заданное значение выходного параметра;
WXY – передаточная функция ОУ по каналу возмущения;
WZY – передаточная функция ОУ по каналу возмущения;
WUY – передаточная функция ОУ по каналу возмущения;
WGY - передаточная функция ОУ по каналу управления;
e - ошибка на входе регулятора.
Графики переходных процессов по температуре на выходе из печи регулирования систем с ПИД – регулятором (черная линия), регулятором Смита (красная линия) и fuzzy – регулятором (синяя линия) представлены на рисунке 5.14.
Заключение
На основании выполненного исследования о работе обжигового отделения трубчатых вращающихся печей, можно сделать следующие выводы:
– Проведен анализ автоматизации технологических процессов с позиций Интернета вещей и показана роль создания общей базы данных о процессе для оптимального управления производством.
– Создана математическая модель трубчатой вращающейся печи в стационарном режиме работы с использованием программного комплекса ReactOp Cascade.
– Построена модель управления обжигом закиси никеля в трубчатой вращающейся печи в программном пакете Matlab.
– Исследована динамика процесса восстановительного обжига закиси никеля.
– Проведено сравнение систем управления по параметрам качества переходного процесса восстановления закиси никеля в трубчатой печи с разными схемами управления
– Для разработанного отделения предложен аппаратурно-технический синтез АСУ ТП.
Целью управления процессом восстановительного обжига закиси никеля в трубчатой вращающейся печи является получение измельченного концентрированного никелевого порошка для дальнейшей его переработки в электропечах. Чтобы получить никелевый порошок определенной крупности необходимо поддержание температуры печи на заданном уровне, для этого был проведен анализ разных систем управления и выбрана модель управления процессом с настройками регулятора, обеспечивающими заданные статические и динамические характеристики объекта при воздействии реальных производственных возмущений.
Содержание работы отражено в следующих основных публикациях:
1. Лиу Ц. Технологические основы получения никеля из окисленных медно-никелевых руд /Ц. Лиу, Ю.В. Шариков // Технологии, инновации и предпринимательство: сборник научных трудов по материалам I Международной научно-практической междисциплинарной конференции. – Санкт-Петербург: НОО «Профессиональная наука». – 2017. – С. 57-61.
2. Лиу Ц. Автоматизация металлургического производства с позиций индустриального интернета вещей / Ц. Лиу // Современная наука: Актуальные проблемы теорий и практики. Серия: Естественные и технические науки. – 2017. – № 7-8. – С. 57-61.
3. Лиу Ц. Математическое моделирование процесса восстановления закиси никеля в трубчатой вращающейся печи / Шариков Ю.В., Лиу Цзыфэнг // Металлург. – 2018. – №7. – С. 27-31.
4. Liu Z. The development of a Process Control System for the Production of Partially Reducing Nickel Oxide in a Tubular Rotary Kiln / I.V. Sharikov, Z. Liu // International Journal of Engineering & Technology. – 2018. – V. 7. – P. 97-104.
5. Liu, Z. Mathematical Simulation of the Process of Nickel Oxide Re-covery in a Tube-Type Rotary Kiln / Z. Liu, Yu.V. Sharikov // Metallurgist. – 2018. – V. 62. – I. 7-8. – P. 27-32.
6. Лиу Ц. Управление процессом получения частично восстановленной закиси никеля в трубчатой вращающейся печи / Ю.В. Шариков, Ц. Лиу // Технические науки: проблемы и решения: сб. ст. по материалам XXIX Международной научно-практической конференции «Технические науки: проблемы и решения». – Москва: Изд. «Интернаука». – 2019. – № 11(27).

Рисунок 4.3 – Общий вид результатов математического моделирования

Рисунок 4.4 – Изменение температурного режима ТВП

Рисунок 4.5 – Изменение состава никеля (зеленая линия) и состава закиси никеля (розовая линия)
Рисунок 5.14 – Графики переходных процессов по температуре на выходе из печи регулирования систем с ПИД – регулятором (черная линия), регулятором Смита (красная линия) и fuzzy – регулятором (синяя линия)








