 2020-05-21
2020-05-21 130
130Отчет по практической работе №3
по дисциплине: «Искусственные нейронные сети и нечеткая логика в задачах контроля и управления»
на тему: «Исследование автоматической системы управления (АСР) с аналоговым ПИ-регулятором и fuzzy-регулятором»
Вариант №1
Выполнил: студент группы 78-61
ФИО
Проверил: к.т.н., доцент кафедры АИТ
Горшкова К. Л.
Альметьевск, 2020
Цель работы: исследование автоматической системы управления с аналоговым ПИ-регулятором и fuzzy-регулятором.
Краткие теоретические сведения
Алгоритмы нечеткого вывода Мамдани (Mamdani)
Пусть заданы два нечетких правила:
- П1: если х есть А1 и y есть В1, тогда z есть С1;
- П2: если х есть А2 и y есть В2, тогда z есть С2.
1. Нечеткость. Находят степени принадлежности для предпосылок каждого правила: A1(x0, A2(x0), B1(y0), B2(y0)).
2. Нечеткий вывод. Определяют уровни «отсечения» для предпосылок каждого правила (операция min):
 ,
,

Определяют усеченные функции принадлежности:


3. Композиция. Производится объединение найденных усеченных функций (операция max), получают нечеткое подмножество для переменной выхода с функцией принадлежности:

4. Дефаззификация. Приведение к четкости (определение z0), например, центроидным методом (как центр тяжести для кривой  :
:
 .
.
Алгоритм иллюстрируется на рисунке 1:

Рисунок 1 - Графическая интерпретация алгоритма Мамдани
Задание:
Исследовать АСР с аналоговым ПИ-регулятором и fuzzy-регулятором. В качестве модели объекта принять апериодическое звено, параметры объекта принять: K=1,5; T=1,8.
Выполнение работы:
АСР с fuzzy-регулятором
Структура АСР в программе Matlab представлена на рисунке 2.

Рисунок 2 – Модель одноконтурной системы автоматического регулирования с ПИ-подобным fuzzy-регулятором
Теперь при помощи пакета Fuzzy Logic Toolbox создадим нечёткую систему, реализующую типовой аналоговый ПИ-регулятор. В окне редактора FIS Editor выбираем тип системы - Мамдани, задаём два входа - для пропорциональной (x1) и интегральной (x2) составляющих, и выходную величину (y).

Рисунок 3 – Окно редактора FIS Editor
Далее задаем функции принадлежности для входных переменных, вызвав окно редактора функций принадлежности двойным щелчком мыши по изображению переменной. Для лингвистического описания каждой переменной выберем семь треугольных термов (NB, NM, NS, ZE, PS, PM, PB).
Лингвистические правила для ПИ-подобного fuzzy-регулятора приведены в таблице 1.
Таблица 1
| e Δe | NB | NM | NS | ZE | PS | PM | PB |
| NB | NB | NB | NB | NB | NM | NS | ZE |
| NM | NB | NB | NB | NM | NS | ZE | PS |
| NS | NB | NB | NM | NS | ZE | PS | PM |
| ZE | NB | NM | NS | ZE | PS | PM | PB |
| PS | NM | NS | ZE | PS | PM | PB | PB |
| PM | NS | ZE | PS | PM | PB | PB | PB |
| PB | ZE | PS | PM | PB | PB | PB | PB |
Для нашего случая x1 соответствует сигналу рассогласования e(k), x2 соответствует приращению сигнала рассогласования Δe(k), а y соответствует Δy(k).

Рисунок 4 – Окно настроек функций принадлежности входной переменной

Рисунок 5 – Окно настроек функций принадлежности выходной переменной
Переходим в редактор правил Rule Editor. Задаем правила в соответствии с таблицей 1.

Рисунок 6 – Окно для ввода продукционных правил

Рисунок 7 – Окно для просмотра пространства управления
Полученный файл сохраняем под именем fuzzy1.fis.
В окне параметров блока Fuzzy Logic Controller указываем имя файла lr3.
Для нормального функционирования модели необходимо каждый раз при открытии файла модели помещать файл lr3.fis в Рабочее Пространство WorkSpace. Для этого в окне модели в меню File выберем пункт Model Properties. В открывшемся окне выберем вкладку Callbacks и в поле PreLoadFcn* указываем:
lr3=readfis(‘lr3’)
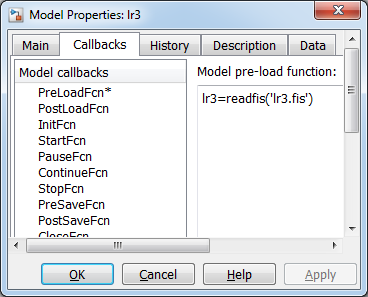
Рисунок 8 – Окно Model Properties
Запустив модель, получаем график переходного процесса (рис. 9).

Рисунок 9 – Переходный процесс
АСР с ПИ-регулятором
Структура АСР в программе Matlab представлена на рисунке 10.

Рисунок 10 – Модель одноконтурной системы автоматического регулирования
с ПИ-регулятором
Значения параметров настройки ПИ-регулятора для данного объекта следующие: P=0,8124, I=0,367.
Запустив модель, получаем график переходного процесса (рис. 11).

Рисунок 11 – Переходный процесс
Вывод: в ходе выполнения данной работы были построены схемы АСР с ПИ-регулятором и ПИ-подобным fuzzy-регулятором. По полученным графикам переходных процессов можно сказать, что использование fuzzy-регулятора дает увеличение времени переходного процесса и числа колебаний, однако динамическая ошибка значительно уменьшается.








