 2020-06-12
2020-06-12 249
249
Рисунок 1.3 – Схема мобильного одноманипуляторного робота
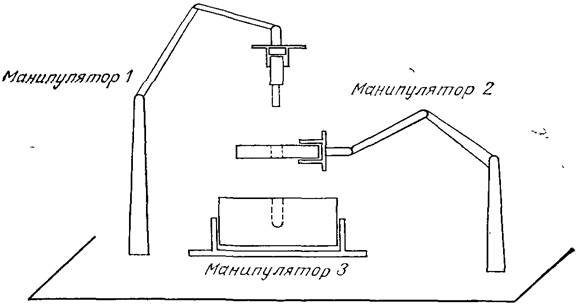
Рисунок 1.4 -Схема трёхманипуляторного робота на неподвижном основании
Для приведения в движение звеньев манипулятора требуется (рисунок 1.5):
1 Распределение первичной энергии (обычно электрической, пневматической, гидравлической)
2 Превращение первичной энергии в механическую
3 Передачу механической энергии звеньям
4 Управление движением (по положению, скорости, усилию, ускорению)

Рисунок 1.5 – Принципиальная схема управления движением звена манипулятора
Управление движением проще всего производить с помощью приводов, каждый из которых непосредственно связан с осью соответствующего сочленения.
Однако это применяется довольно редко по следующим причинам:
1 Многие преобразователи механической энергии по своей конструкции сообщают высокие скорости исполнительным органам, но создают малые усилия, что требует применения редукторов
2 Механизм привода с редуктором имеет большие габариты, что препятствует выполнению задания (в особенности если привод размещается вблизи рабочего органа)
3 Каждый привод имеет массу и момент инерции, которые увеличивают массу и моменты инерции звеньев и всей системы. Эти дополнительные нагрузки необходимо учитывать при выборе приводов, расположенных на звеньях, так как они существенно увеличивают общую массу.
При выборе необходимых элементов конструкции и расчете их параметров переходят к проектированию робота. Основные стадии проектирования робота представлены на рисунке 1.6

НМС – несущая механическая система; ИМС – исполнительная механическая система;
ТЗ – техническое задание; ТП – технический проект; РП – рабочий проект;
ЭО – экспериментальный образец; ТД – техническая документация; ОО – опытный образец
Рисунок 1.6 - Основные стадии проектирования ПР и их взаимосвязь
Практическая часть
Задание
Изучить возможности неподвижных и мобильных роботов, конструкции промышленных роботов и стадии их проектирования








