 2020-06-08
2020-06-08 2149
2149К основным дискретным параметрам, преобразуемым датчиками в электрические сигналы, можно отнести состояние объекта («включен —выключен», «открыт—закрыт» и т.д.) и количество объектов. Частным случаем параметра «состояние» можно считать параметр «код» (операции, позиции и т.д.), который, как и состояние, определяется по некоторому признаку или набору признаков.Как уже говорилось ранее, любой аналоговый (т.е. непрерывный) параметр может быть дискретизирован, т.е. представлен набором значений, отличающихся одно от другого на определенную величину. Предположим, что суппорт обрабатывающего станка может иметь фиксированные значения угла поворота 0, 10, 20° и т.д. Угол поворота — величина аналоговая, но если пронумеровать положения суппорта, то мы будем иметь дело с дискретными величинами — кодами позиций: 1, 2, 3 и т.д. Для получения информации о том, на какой угол повернут суппорт в данный момент, можно использовать датчик углового перемещения, но если на суппорте есть указатель, по которому можно определить код позиции суппорта, то проще использовать датчик состояния.
Разница между датчиками состояния и количества заключается в следующем. Датчик состояния формирует электрический сигнал, однозначно соответствующий одному из двух или нескольких признаков состояния объекта. Например, двигатель включен — на выходе датчика есть сигнал; двигатель выключен — на выходе датчика сигнала нет. И наличие, и отсутствие сигнала содержат информацию о состоянии объекта.
Датчик количества формирует сигнал при наличии единственного признака (например, при наличии изделия на конвейере), после чего он возвращается в исходное состояние. При каждом очередном появлении этого признака формируется новый сигнал, т.е. именно в наличии этого сигнала заключается полезная информация.
Сигналы с датчика количества поступают на устройство обработки дискретных сигналов — счетчик, который подсчитывает количество поступивших сигналов, а значит, количество объектов, с которыми связан датчик. Сигналы с датчика состояния поступают на другое устройство — регистр, по которому оператор или управляющее устройство судят о состоянии объекта, с которым связан датчик.
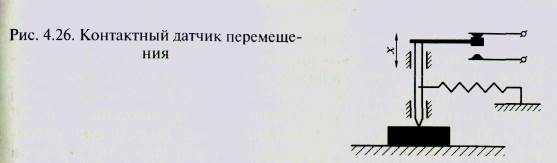
Простейший датчик дискретных параметров — контактный (рис. 4.26). Его дискретный входной параметр — перемещение; дискретная выходная величина — сопротивление электрической цепи, которое может быть или равным нулю (контакты замкнуты), или бесконечно большим (контакты разомкнуты). Дискретность входного параметра означает, что датчик воспринимает только два значения перемещения движущегося штока относительно его начального положения: либо перемещение меньше определенного значения и контакт разомкнут, либо больше и контакт замкнут. Такой датчик может использоваться, например, как концевой выключатель цепи управления движущимся элементом, достигшим крайнего положения, или для контроля предельно допустимого размера деталей на конвейере. Погрешность его может быть очень маленькой — около 1 мкм.
100
Широко используются для преобразования дискретных сигналов оптические датчики. В подразд. 4.2.3 была рассмотрена работа оптического датчика как преобразователя аналоговой величины (углового перемещения), работающего в дискретном режиме. Но он может использоваться также и как датчик состояния, и как датчик количества.
В первом случае объект, состояние которого контролируется, должен быть снабжен непрозрачным «флажком», который при одном состоянии объекта перекрывает поток света от источника к приемнику излучения, а при другом его состоянии пропускает этот поток. Соответственно в цепи приемника излучения либо нет тока, либо он есть. Роль флажка может выполнять и сам контролируемый объект.
В режиме датчика количества источник и приемник излучения располагаются так, что каждый очередной объект, подлежащий счету, перекрывает оптический канал и очередной сигнал с приемника излучения передается на счетчик.
Оптические датчики удобны тем, что в них отсутствует механический контакт с контролируемым объектом. Они широко используются не только для измерения и контроля технологических параметров, но и для защиты обслуживающего персонала от попадания в опасную зону. В такой ситуации сигнал с датчика может не только предупредить персонал об опасности, но при необходимости автоматически отключить оборудование во избежание травмирования людей.
Комбинация дискретного контактного датчика с первичными механическими преобразователями позволяет создавать дискретные датчики аналоговых параметров, называемые релейными. Контактный датчик размещается рядом с механическим преобразователем, выходной величиной которого является перемещение (например, пружинным преобразователем силы, сильфонным преобразователем давления или биметаллическим — температуры). По достижении заданного значения параметра перемещающийся элемент замыкает контакты датчика, формируя выходной сигнал. При изменении параметра в обратном направлении контакты снова размыкаются, причем обычно имеется небольшая разница в значениях параметров, соответствующих замыканию и размыканию контактов (гистерезис).
101
Контрольные вопросы
1. Дайте определение датчика.
2. Почему именно в электрический сигнал датчик преобразует технологический параметр?
3. Какие датчики называются активными? Назовите их.
4. Назовите основные выходные параметры пассивного датчика.
5. Перечислите основные характеристики датчиков.
6. Перечислите виды датчиков перемещения. Что является их входной и выходной величиной?
7. Назовите основные датчики деформации, силы. Что является их входной и выходной величиной?
8. Назовите основные датчики температуры. Что является их входной и выходной величиной?
9. Назовите основные датчики дискретных параметров. Какие принципы положены в основу их работы?
Г ЛАВА 5 УСТРОЙСТВА ПРЕОБРАЗОВАНИЯ СИГНАЛОВ
Если человек сильно утомлен, то может не заметить, например, идущего ему навстречу приятеля или не услышать с первого раза звонок в дверь. Но ведь его датчики — глаза и уши — получили информацию и преобразовали ее в сигналы, поступившие в нервную систему. Почему же мозг не отреагировал на эти сигналы? Возможно, потому, что они оказались слишком слабыми — из-за переутомления ваша нервная система не обеспечила необходимое усиление этих сигналов или не смогла выделить их на фоне других поступивших сигналов (помех).
В технических системах тоже возможны ситуации, когда сигналы датчиков слишком слабые, сопровождаются помехами, поэтому в них большое внимание уделяют устройствам преобразования сигналов. Эти устройства обеспечивают:
• передачу информационных сигналов от датчиков к аппаратуре обработки сигналов и управляющих сигналов к исполнительным механизмам;
• предварительную обработку (нормализацию) сигналов датчиков;
• усиление сигналов;
• коммутирование сигналов;
• преобразование аналоговой величины в дискретную, и наоборот;
• подсчет событий;
• формирование управляющих сигналов для исполнительных механизмов.








