 2020-06-30
2020-06-30 946
946Тема: Исследование работы электродвигательного исполнительного механизма.
Цель работы: Изучить работу электродвигательного исполнительного механизма.
Ход работы:
В пищевой промышленности наибольшее распространение получили электрические и пневматические исполнительные механизмы (ИМ). Все электрические исполнительные механизмы можно разделить на две основные группы:
1. электромагнитные
2. электродвигательные.
Электродвигательные исполнительные механизмы представляют собой электроприводы, предназначенные для перемещения регулирующих органов в системах автоматического регулирования и управления и состоят из электродвигателя, редуктора, выходного устройства для связи с регулирующим органом и ряда дополнительных устройств.
1. У механизмов с контактным управлением, включение, отключение и реверсирование двигателей осуществляются от релейно-контактной аппаратуры, т.е. скорость перемещения выходного элемента (вала или штока) не зависит от управляющего сигнала, а направление перемещения определяется знаком сигнала. Для механизмов с бесконтактным управлением используют магнитные, электронные и полупроводниковые усилители.
Позиционные исполнительные механизмы применяют для управления рабочими органами по сигналам от контактных или релейных устройств вторичных приборов.
ПИМ(рис.а) используется в системах двухпозиционного регулирования и в системах управления рабочими органами. Он представляет собой силуминовый литой корпус 4, в котором размещены однофазный асинхронный двигатель (АД) 2, и редуктор 1. На одном конце выходного вала редуктора закреплён диск 6 с эксцентричным пальцем 5, к которому присоединяется регулирующий орган; на другом конце вала редуктора закреплён ползун блокирующего переключателя 3. На электрической схеме (рис.б) показано, что им управляет контактное управляющее устройство измерительного прибора (вторичного преобразователя).
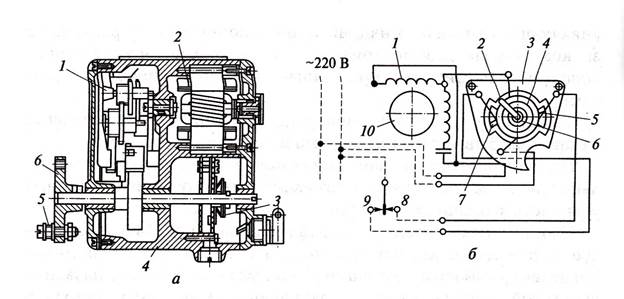
Оно может замыкать контакт 8 или 9 и находиться в нейтральном положении. В этом положении ползун 2 переключателя 3 находится в изолированном контакте 5 или 7, обмотка 1 статора двигателя обесточена и ротор неподвижен. При изменении регулируемого параметра замкнётся контакт 8 и в обмотке статора АД появится ток, идущий по цепи через контакты 8 и 5, ползун 12, внутреннее токонесущее кольцо 4 и обмотку статора 1. Вал ротора через редуктор сообщает вращение выходному валу 6, ползун 12 сходит с контакта 5 и скользит по токонесущей пластине, цепь двигателя остаётся замкнутой. После одного полуоборота ползун 12 сойдёт на контакт 7,цепь разомкнётся и АД остановится. При замыкании контакта 9 цепь окажется снова замкнутой, АД будет вращаться в том же направлении до тех пор пока ползун 12 не сойдёт с токонесущей пластины на контакт 5. Так как выходной вал редуктора непосредственно соединён с рабочим органом, то последний будет соответственно полностью закрываться или открываться. Таким образом, для управления исполнительным механизмом ДР-М необходимо иметь две контактные группы.
Пропорциональные исполнительные механизмы используют для управления рабочими органами регуляторов пропорционального действия.
Пропорциональный исполнительный механизм ПР – М (рис. в) используют в системах функционального регулирования, конструкция его аналогична конструкции механизма ДР – М. В корпусе 5 размещён однофазный реверсивный конденсаторный двигатель 2, редуктор 1, конечные выключателя и реостат обратной связи 4. Подвижной контакт реостата обратной связи 3 закреплён на валу двигателя и при его работе скользит по 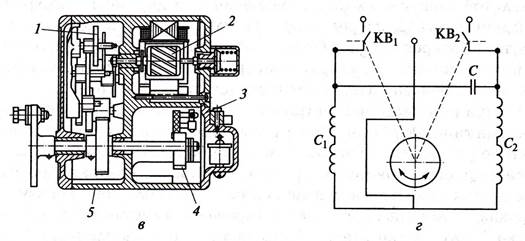 обмотке реостата.
обмотке реостата.
Таким образом, каждому положению выходного вала исполнительно го механизма соответствует определённое положение подвижного контакта реостата обратной связи.
Цепь питания (рис. Г) обмоток статора замыкается контактами регулирующего устройства. Выключатели КВ1 и КВ2 включены в разрыв проводов, подводящих ток к обмоткам статора С1 и С2, и предназначены для ограничения хода выходного вала механизма. Выключатели устанавливают вручную на любой угол поворота в пределах 0…180°.
При повороте вала на заранее установленный угол размыкается выключатель КВ1 и останавливается исполнительный механизм. Это соответствует крайнему положению рабочего органа. А контакт выключателя КВ2 соответствует второму крайнему положению рабочего органа, в это время он замкнут.
Исполнительные механизмы ДР –М и ПР –М имеют диск и шток для соединения с регулирующими органами, которые совершают вращательные или поступательные движения. По заводской настройке продолжительность перемещения вала из одного крайнего положения в другое составляет 30 с.; настройку можно изменить сменой шестерен редуктора, т.е. изменить его передаточное число и соответственно продолжительность поворота вала: 10. 15, 22, 45, 60, 75, 90, 105, 120 с.
Для управления регулирующими органами, приведение в действие которых требует больших усилий, применяют исполнительные механизмы МЭО-К.

Исполнительный механизм МЭО-К (рис.а) состоит из электродвигателя 2, редуктора 4, узла индукционных датчиков и конечных выключателей. Исполнительный механизм подключается через штуцерный ввод 3, для сочленения с регулирующим органом служит кривошип 5, маховик 1 предназначен для ручного управления. К регулирующему устройству (рис.б) механизм МЭОК – подключают ключом КВ, с помощью которого переключаются схемы на ручное и дистанционное операторные управления. Исполнительный механизм управляется с помощью магнитного реверсивного пускателя типа МКР –О. Исполнительный механизм к сети питания подключается выключателем АВ. Схема собственно исполнительного механизма МЭО –К включает трёхфазный реверсивный электродвигатель Д типа АОЛ, электромагнитный тормоз ЭМ, который фиксирует выходной вал в любом положении после снятия управляющего сигнала. Для выключения электродвигателя в крайних положениях выходного вала предназначены конечные выключатели В1….В4. Изменяя
Положение кулачков конечных выключателей можно регулировать угол поворота выходного вала в пределах 0…270°. Индукционный датчик ДИ2 предназначен для подключения дистанционного указателя ДУП, индукционный датчик ДИ1, является датчиком обратной связи по положению выходного вала исполнительного механизма.
Контрольные вопросы:
1. Что представляют собой электродвигательные исполнительные механизмы?
2. Отличия механизмов с контактным управлением и с бесконтактным управлением?
3. Характеристика и работа позиционных исполнительных механизмов?
4. Характеристика и работа пропорциональных исполнительных механизмов?
5. Характеристика и работа исполнительных механизмов МЭО-К.








