 2020-08-05
2020-08-05 450
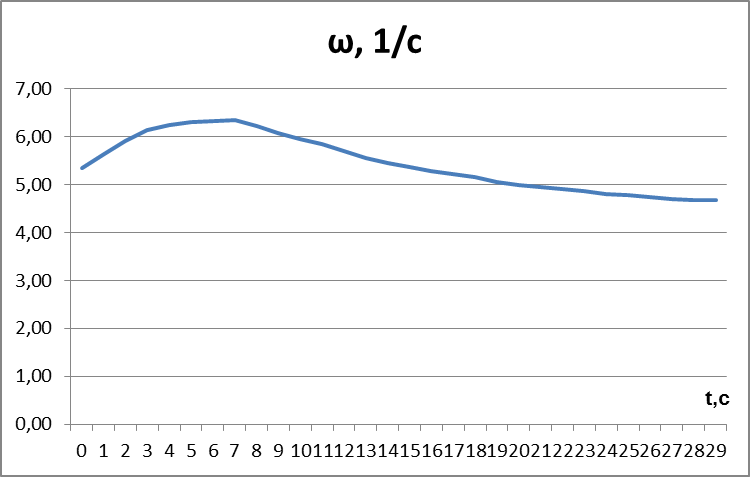
450Динамические режимы ВЭУ, в отличие от статических или установившихся режимов, характеризуются изменениями таких основных параметров, как угловая скорость вращения ветроагрегата (w) и угол поворота лопасти (j). С этой точки зрения режим запуска и режим торможения ВЭУ являются динамическими режимами. Что касается рабочего режима, то он может рассматриваться как статический при постоянной скорости ветра (например, для расчета выработки энергии) или динамический при исследовании механических или электрических процессов при переменном характере скорости ветра.
Движение ветроагрегата на динамических режимах описывается уравнением динамики:
где Мв – вращающий момент ветроагрегата, который создается аэродинамическими силами ветроколеса и электромеханическими силами генератора;
Мс – характеризует силы трения и электромеханические силы, возникающие в генераторе при вращении ротора, и приведенные к оси вращения ветроагрегата.
Момент инерции (I) при выполнении курсовой работы можно определить по следующему соотношению:
 ,
,
или по графику рис. 7.2, которые получены путем обработки значений момента инерции по ряду ВЭУ; величина радиуса ВК – в м.

Номинальное значение момента (Мном) для определения момента сопротивления в этом дифференциальном уравнении берется из соотношения:
 ,
,
Первая фаза запуска из остановленного состояния характеризуется следующими значениями угловой скорости и углового ускорения:
 ,
,  .
.
Эта фаза характеризуется нарастанием вращающего момента до величины Мтрог., при котором преодолевается сопротивление трения покоя и ветроколесо начинает вращательное движение  .
.
На первой фазе запуска ( ):
):
Мс = 0,007 Мном
При вращении ветроколеса ():
Мс = 0,005 Мном =935Hм
4.1. Автономный режим запуска:
Автономный запуск ВЭУ рассчитывается для минимальной скорости ветра
Vmin =6,15 и в диапазоне угловых скоростей [0, wmin =3,57].
Уравнение вращения:
 ,
,
а угол установки лопасти выбирается таким, чтобы m (z) = mmax (z), при этом зависимость mmax (z) представляет собой огибающую графика m (z).
 , где
, где  с
с
4.2. Двигательный режим запуска:
Двигательный режим разгона в курсовой работе рассчитывается при скорости ветра (V):
V = Vp,
где Vp – расчетная скорость ветра
Для этого метода разгона ветроагрегата уравнение вращения вокруг собственной оси:
 ,
,
где Мдв – момент генератора в двигательном режиме.
Номинальное значение момента (Мном) для определения момента сопротивления в этом дифференциальном уравнении берется из соотношения:
 ,
,
где Nном – номинальная мощность ВЭУ;
wном – номинальная угловая скорость ветроколеса, определенная в процессе расчета статических характеристик.
В частности, угол разгона j может выбираться из условия максимальности коэффициента момента m (z) при данном z.
Расчет выполняется в диапазоне w: [0, wном ].
Интегрирование уравнения изменения угловой скорости проводится методом Эйлера:
 ,
,
где Dt – шаг интегрирования.
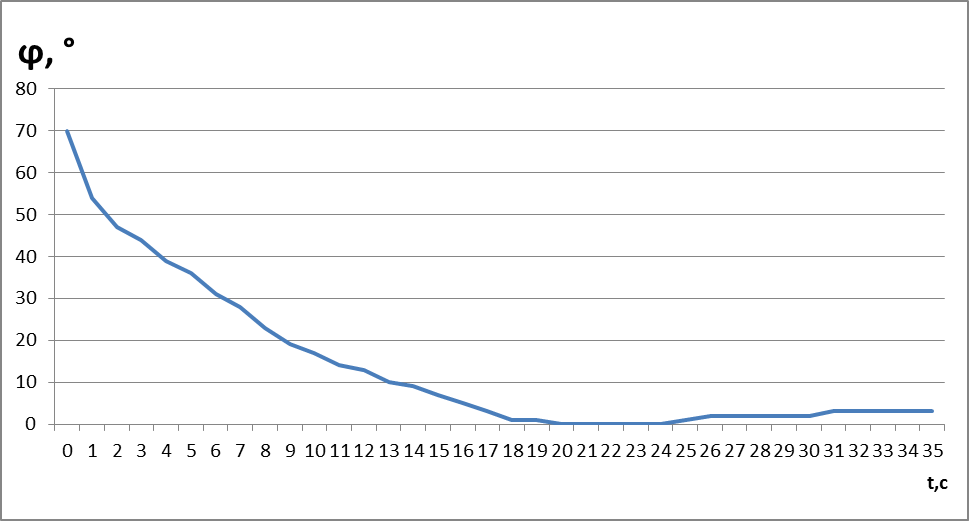
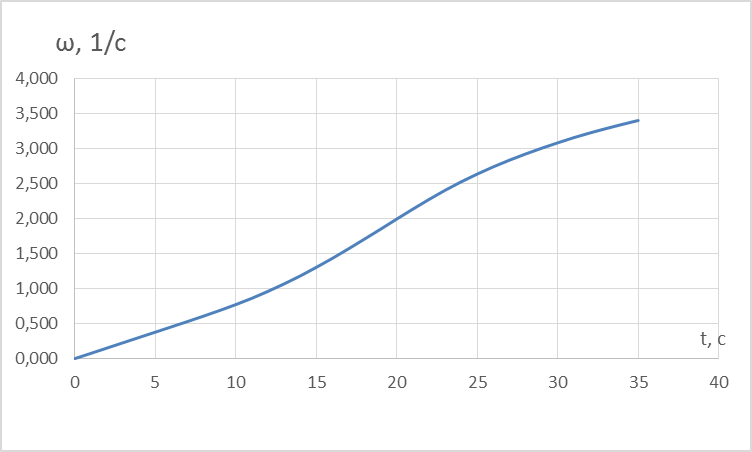
4.3. Режим торможения:
Режим торможения предназначен для перевода ВЭУ из состояния вращения в состояние остановки либо медленного вращения. Торможение ветроагрегата осуществляется поворотом лопастей во флюгерное положение, в котором вращающий аэродинамический момент ветроколеса близок к нулю.
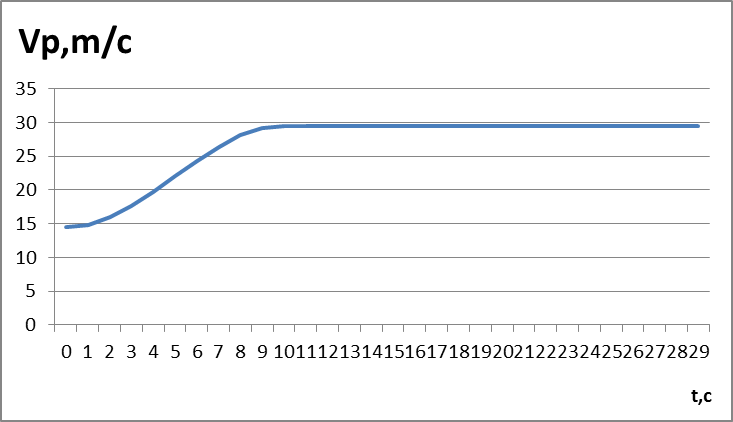
Режим торможения рассчитывается для расчетного значения скорости ветра V 0 = V p при его следующем изменении в процессе торможения [4]:
V p, при t £ 0
V (t)= V p + 7,5 [1 – Cos( )] при 0 < t £ 10 c
)] при 0 < t £ 10 c
V p + 15 при t > 10 c
Уравнение движения ветроагрегата
не содержит момента генератора, т.к. из условий безопасности режиму торможения должно предшествовать отключение генератора.
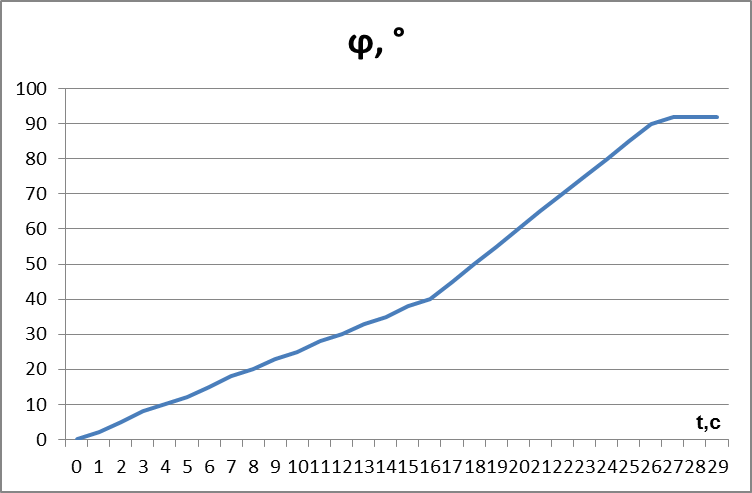
При расчете режима торможения угловую скорость поворота лопасти ( ) следует ограничить величиной:
) следует ограничить величиной:
4о /с, для Nн ³ 500 квт
8о /с, для Nн < 500 квт.
 =1,14
=1,14
5. Система безопасности ВЭУ.
Система безопасности ВЭУ представляет собой совокупность устройств, которые при выходе контролируемых параметров за заданные пределы безопасности берут управление на себя с тем, чтобы исключить появление ситуаций, опасных для целостности установки. Это достигается в результате самостоятельно выполняемого торможения.
Выход из строя отдельного компонента системы безопасности не должен приводить к отказу всей системы безопасности. Одновременный выход из строя двух независимых компонентов системы безопасности считается невероятным событием и поэтому не рассматривается.
Рабочая тормозная система ВЭУ Р-1
Рабочая тормозная система ВЭУ Р-1 в качестве исполнительного механизма использует электрогидравлический привод, который входит в состав контура управления поворотом лопасти. При необходимости провести останов ВЭУ в нештатной ситуации ЦВМ САУ выдает сигнал в гидроусилитель, который переводит золотник в крайнее положение, соответствующее переводу лопасти в флюгерное положение. Жидкость поступает в соответствующую полость гидроцилиндра через полностью открытое окно гидроцилиндра, заставляя его перемещаться с максимальной скоростью в сторону флюгирования. Этот процесс называется «принудительным флюгированием». Источником энергии для этого процесса служат помимо гидронасосов гидроаккумуляторы. Для того, чтобы обеспечить функционирование этой рабочей тормозной системы использованы несколько аккумуляторов, суммарный объём жидкости в которых достаточен для перевода лопасти из рабочего положения во флюгерное.
Аварийная тормозная система ВЭУ Р-1.
В состав аварийной тормозной системы ВЭУ Р-1 входит баллон со сжатым под большим давление азотом. Если рабочая система не выполнила свои функции, в ЦВМ формируется признак аварийного останова, по которому подрывается пиропатрон в баллоне со сжатым азотом, и газ поступает непосредственно в соответствующую полость гидроцилиндра, перемещая лопасти во флюгерное положение.
Требования к тормозной системе.
1) Тормозная система должна включаться без временной задержки. «Без временной задержки» означает, что после получения сигнала на торможение должны начаться операции по приведению в действие тормозной системы.
2) Тормозная система должна оставаться в рабочем состоянии даже при выходе из строя внешнего энергоснабжения.
3) Тормозная система должна действовать автоматически.
4) Функции безопасности должны иметь приоритеты. Если одна и та же система используется как рабочая и как тормозная, то функциям торможения должно отдаваться предпочтение. В частности, при выполнении функции торможения управляющие сигналы от привода должны быть отключены.
5) По крайней мере одна из тормозных систем должна использовать аэродинамическое торможение.
6) Система измерения угловой скорости должна быть установлена на медленно вращающейся части. Такие же требования предъявляются к тормозу.
7) При торможении, связанным с выполнением функций безопасности, СГЭЭ должна отключаться (по крайней мере, при использовании асинхронного генератора).
Число оборотов (угловая скорость).
Это один из самых основных контролируемых параметров. Измеряется датчиком оборотов и датчиком угловых скоростей. Иногда нет необходимости в каждой тормозной системе использовать датчик оборотов. Например, в системе торможения может быть использован центробежный регулятор, который сам является и измерительным и исполнительным органом.
Характерные скорости вращения ВК:
- п 1 - минимальное рабочее число оборотов ВК;
- п 2 – максимальное рабочее число оборотов ВК;
- [ п 1, п 2] – рабочая область оборотов ВК;
- п 0 – число оборотов отключения, такое число оборотов, при которых задействуется рабочая тормозная система.
- п а – аварийное число оборотов, при достижении которых со стороны системы безопасности должно осуществляться немедленное торможение;
- п max – максимальное число оборотов системы, это число оборотов не должно достигаться ни при каких условиях даже на короткое время, максимальное число оборотов используется при прочностных расчётах, при этом величина п max должна учитывать возможный резонанс системы.
Эти характерные частоты можно представить на диаграмме:
 51,1 58,25 60 62
51,1 58,25 60 62
| п 1 п 2 п 0 п а п max п |
| n 1 | 
|
| n 2 | 51,1 |
| n 0 | 58,25 |
| n max | 62 |
| n а | 60 |








