 2020-08-05
2020-08-05 131
131Экзаменационная работа по учебной дисциплине МДК. 01.01 Технология монтажа и пуско-наладки отдельных модулей и мехатронных систем.
по специальностям среднего профессионального образования
Мехатроника и мобильная робототехника (по отраслям)
на базе основного общего образования
(в рамках дистанционного обучения)
ФИО______________________________________________________________________
Дата экзамена_______________________________________________________________
Бланк ответов
| Номер задания | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 | 17 | 18 | 19 | 20 |
| Вариант ответа |
Итоговое тестирование по МДК. 01.01 Технология монтажа и пуско-наладки отдельных модулей и мехатронных систем
Инструкция по выполнению работы
Для выполнения работы по МДК. 01.01 Технология монтажа и пуско-наладки отдельных модулей и мехатронных систем отводится 90 минут. Работа состоит из 20 заданий. К каждому заданию дается несколько вариантов ответов, из которых правильный только один. Внимательно прочитайте каждое задание и предлагаемые варианты ответа. Отвечайте только после того, как вы поняли вопрос и проанализировали все варианты ответа. Выполняйте задания в том порядке, в котором они даны.
Если какое-то задание вызывает у вас затруднение, пропустите его. К пропущенным заданиям можно будет вернуться, если у вас останется время.
К тесту прилагается «Бланк ответов» с таблицей. Вам необходимо перечертить таблицу и записывать в неё варианты ответов. В заданиях, где не требуется решение, вы записываете только вариант вашего ответа. Если в заданиях предложены задачи, необходимо решить их. Фото таблицы с вариантами ответов и фото решения задач с указанием ФИО, номера группы, необходимо выслать на адрес электронной почты в системе MOODLE.
Постарайтесь выполнить как можно больше заданий и набрать наибольшее количество баллов.
Желаем успеха!
Вариант
1. Пусконаладочные работы (ПНР) мехатронных систем, производятся в:
а) 1 этап;
б) 2 этапа;
в) 3 этапа;
г) 4 этапа;
2. Пусконаладочные работы (ПНР) мехатронных систем – комплекс работ, выполняемых в период подготовки и проведения индивидуальных испытаний и комплексного опробования оборудования:
а) являются начальной частью строительно-монтажных работ (СМР);
б) не являются частью строительно-монтажных работ (СМР);
в) являются финальной частью строительно-монтажных работ (СМР);
г) выполняются параллельно со строительно-монтажными работами (СМР);
3. Комплект технической документации на мехатронную систему, включает в себя:
а) схемы структурные, функциональные, электрические, монтажные, подключения и расположения;
б) графические документы в виде чертежей общего вида, габаритных, сборочных, узлов и деталей;
в) текстовая документация: общие технические условия, частные технические условия, техническое описание;
г) Всё вышеперечисленное;
4. Монтажные оси и высотные отметки подразделяются на рабочие и контрольные. По рабочим осям и отметкам:
а) устанавливают и выверяют контрольные оси;
б) устанавливают и выверяют оборудование;
в) контролируют положение рабочих осей;
г) устанавливают и выверяют высотные отметки;
5. На рисунке изображено:
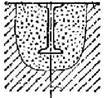 |
а) анкер;
б) репер;
в) плашка;
г) заклёпка;
6. Перед строповкой мехатронной системы МС и установкой его непосредственно на фундамент необходимо:
а) заблокировать звенья подвижности;
б) разблокировать звенья подвижности;
в) отсоединить звенья подвижности;
г) присоединить звенья подвижности;
7. В ангулярной плоской системе координат объект манипулирования перемещается в координатной плоскости благодаря:
а) относительным линейным перемещениям звеньев руки, имеющих постоянную длину;
б) относительным поворотам звеньев руки, имеющих изменяющуюся длину;
в) относительным линейным перемещениям звеньев руки, имеющих изменяющуюся длину;
г) относительным поворотам звеньев руки, имеющих постоянную длину;
8. Число степеней подвижности манипулятора это:
а) сумма возможных координатных движений объекта манипулирования относительно опорной системы (стойки, основания) робота;
б) сумма возможных координат установки робота относительно размеров цеха:
в) сумма возможных координатных движений объекта манипулирования относительно положений всех звеньев робота;
г) сумма возможных координат установки робота в цехе относительно положений всех его звеньев;
9. На рисунке изображен пневмораспределитель:
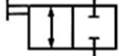 а) 1/2;
а) 1/2;
б) 2/2;
в) 3/2;
г) 5/2;
10. На рисунке изображен пневмоцилиндр:
 а) одностороннего действия;
а) одностороннего действия;
б) двухстороннего действия;
в) трехстороннего действия;
г) поворотного действия;
11.  На рисунке изображен:
На рисунке изображен:
а) обратный дроссель;
б) регулируемый дроссель;
в) обратный клапан;
г) регулируемый клапан;
12. Система управления пневмоприводном осуществляется:
а) с помощью циклограммы;
б) табличным способом;
в) словесным способом;
г) всеми вышеперечисленными способами;
13. Датчики в системах управления станков с ЧПУ исполняют функцию:
а) прямой связи;
б) обратной связи;
в) прерывания связи;
г) переключения связи;
14. Системы замкнутого типа:
а) не используют внешние датчики, так как замкнуты сами на себя;
б) фиксируют только наличие или отсутствие сигнала из подсистемы управления;
в) используют внешние датчики для проверки нужных параметров;
г) не могут дать информации о реальном положении инструмента;
15. Энкодеры в высокоточных станках с ЧПУ:
а) применяются на всех степенях подвижности;
б) применяются только на схватах;
в) применяются только на поворотных степенях подвижности;
г) не применяются;
16. Устройство ЧПУ предназначено:
а) для выдачи управляющих воздействий рабочим органам станка в соответствии с программой управления;
б) для выдачи управляющих воздействий датчикам станка без наличия программы управления;
в) для выдачи управляющих воздействий органам станка без наличия программы управления;
г) для выдачи управляющих воздействий датчикам станка в соответствии с программой управления;
17. На рисунке изображен:
 |
а) поворотно-линейный датчик положения;
б) поворотный датчик положения;
в) линейный датчик положения;
г) криволинейный датчик положения;
Могут ли измерять вращающиеся датчики линейное перемещение?
а) нет, не могут, в некоторых режимах;
б) да могут, в зависимости от режима;
в) нет, не могут вообще;
г) да могут, но не напрямую;
19. В системах ЧПУ на всем пути подготовки программы управления вплоть до ее передачи рабочим органам станка мы имеем дело только с:
а) информацией в аналогово-цифровой форме;
б) информацией в цифровой форме;
в) информацией в цифро-аналоговой форме;
г) информацией в аналоговой форме;
20. ЧПУ это:
а) Числовое Пошаговое Управление;
б) Частотное Программное Управление;
в) Числовое Программное Управление;
г) Частотное Программное Управление;








