 2020-09-24
2020-09-24 164
164Динамическая погрешность обусловлена реакцией средства измерения на скорость изменения входного сигнала. Эта погрешность зависит от инерционности средства измерения входного сигнала, изменений нагрузки и влияющих величин. На выходной сигнал средства измерений влияют значения входного сигнала и любые изменения его во времени.
Например, изменение нагрузки на турбину требует изменение напора воды (количества топлива) для его работы. Однако подвижные грузики 2 центробежного регулятора и масса турбины обладают определенной инерцией. По этой причине всякое изменение скорости вращения вала сопровождается рассогласованием между изменением количества подаваемого топлива и скоростью вращения вала двигателя. При этом наблюдаются колебания (Iизм) - переходной процесс, см. рис 5.
Динамической характеристикой системы автоматического регулирования называется зависимость изменения регулируемой величины от времени в процессе регулирования при возникновении возмущающего воздействия.
Характеристики системы регулирования (рис.7).
Виды переходных процессов.
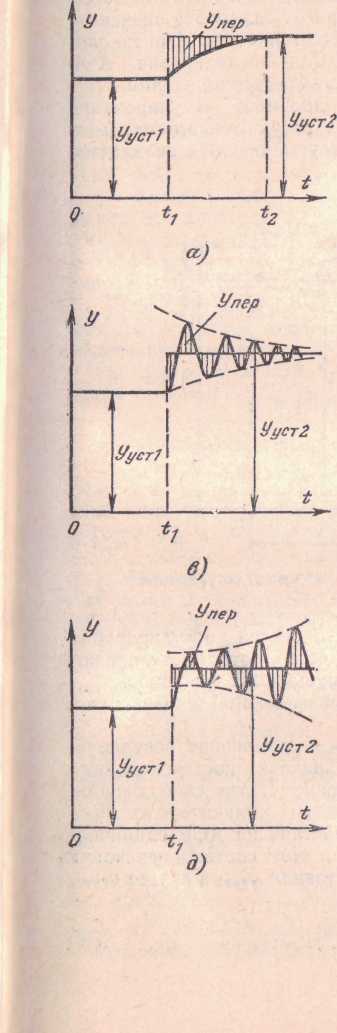
| Пример 1. Идеальный переходной процесс. Автоматическая система регулирования переходит из одного установившегося состояния в другое (рис. 7а). Регулируемый параметр монотонно приближается к новому установившемуся значению Yуст2. В течение переходного процесса Yпер стремится к 0, т. е. происходит уменьшение ординаты Yпер. В этом случае переходный процесс имеет затухающий характер, а сама АСР является устойчивой. Пример 2. Затухающий переходной процесс (практический). Переходный процесс протекает, как показано на рис. 7 в. Система, совершив несколько колебаний около нового установившегося значения регулируемого параметра Yуст2, приходит к установившемуся режиму работы. В этом случае Yпер изменяется как по абсолютному значению, так и по знаку. Автоматическая система, регулирования является устойчивой, потому что с течением времени Yпер стремится к 0. Пример 3. Неустойчивый переходной процесс. Предположим, что в АСР начался переходный процесс в момент t = tt(рис. 7 б). Переходный процесс имеет расходящийся характер, потому что с течением времени Yпер не стремится к нулю, а возрастает и АСР в переходном процессе неустойчива. Монотонные переходные процессы в двух рассмотренных примерах называются также апериодическими переходными процессами. |
| Рис. 7. Примеры переходных процессов. |
В общем случае значение регулируемого параметра в неустановившемся режиме в каждый момент времени
Y=Yуст+Yпер, где Yуст – установившееся значение регулируемого параметра,
Yпер – переходная составляющая изменения регулируемого параметра, изменяющаяся по времени в течении переходного процесса.
При переходе системы из одного установившегося режима в другой она может оказаться либо устойчивой, либо неустойчивой. Чтобы определить это, необходимо произвести исследование динамики процесса регулирования, т. е. определить закон измерения регулируемого параметра в функции времени при воздействии на АСР возмущающих факторов. Если Yпер стремится к нулю хотя бы за неограниченно большой отрезок времени, то АСР будет устойчивой. Если с течением времени Yпер не стремится к нулю, то АСР будет неустойчивой. Примеры переходных процессов см. на рис. 7.








