 2020-09-24
2020-09-24 101
1011. Особенности и применение синхронных двигателей
2. Устройство синхронного двигателя
3. Механическая характеристика
4. Тормозные режимы
Литература: А.М. Гуржій, А.М. Сільвестров, Н.І.Поворознюк.- Електротехніка з основами промислової електроніки.-К.: Форум, 2002
Характерной особенностью синхронного электродвигателя является постоянство его угловой скорости

где f, p — соответственно частота сети и число пар полюсов
Синхронные электродвигатели в основном применяют в приводах средней и большой мощности в тех случаях, когда режим работы длительный и регулирования скорости не требуется: воздуходувки, эксгаустеры, компрессоры кислородных станций, мощные вентиляторы и насосы, дробилки, мельницы, приводы черновых клетей прокатных станов, ножниц и т. п. В последние годы в связи с развитием полупроводниковой преобразовательной техники наметилась тенденция к использованию синхронных двигателей с частотным управлением и в регулируемых электроприводах. Достоинством этих двигателей является простота конструкции, надежность, высокие значения cos φ и к. п. д., большая номинальная мощность и др.
Схема синхронного двигателя приведена на рис.1.
На роторе расположены две обмотки: короткозамкнутая (пусковая) ОП и возбуждения постоянного тока ОВ. Обмотка возбуждения двигателя при пуске замыкается на разрядный резистор Rр, который предохраняет ее от пробоя. При скорости, близкой к синхронной ω≥ 0,95ω 0, обмотка возбуждения автоматически подключается к источнику постоянного тока на полное напряжение (контакты КМ замыкаются). При этом двигатель входит в синхронизм. Дли нормального вхождения в синхронизм необходимо, чтобы входной момент был больше статического момента на валу MBX>MC.
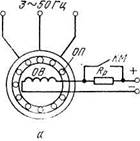
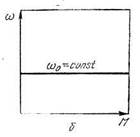
Рис. 1. Схема синхронного
двигателя
Механическая характеристика синхронного двигателя представляет собой прямую, параллельную оси моментов. Независимо от нагрузки на валу скорость двигателя остается неизменной, равной скорости поля статора, и определяется формулой
где f, p — соответственно частота сети и число пар полюсов
При изменении нагрузки на валу изменяется положение осей магнитных полей статора и ротора, которые характеризуются углом θ сдвига фаз между векторами э/д. с. в обмотке —- статора и напряжения сети. Зависимость момента М двигателя от угла θ называется угловой характеристикой, которая представляет собой синусоиду
 (18)
(18)
где Uс — фазное напряжение сети; Е — фазная э. д. с, наводимая в обмотке статора нолем в обмотке возбуждения ротора; х — продольное синхронное индуктивное сопротивление статора; Ммах — максимальный момент.
Из уравнения (18) видно, что вращающий момент синхронного двигателя пропорционален напряжению сети и э. д. с. Е, которая зависит от тока возбуждения двигателя. При холостом ходе угол θ = 0, в двигательном режиме М>0. С увеличением угла θ вращающий момент возрастает и при θ=π/2 достигает максимального значения. Работа при углах θ < π /2 будет неустойчивой, поскольку вращающий момент будет снижаться и это может привести к выпадению двигателя из синхронизма. Номинальной нагрузке на валу соответствует угол θ = 20-30°.
Перегрузочная способность двигателей λ=Ммах,х1Мн = 2 -З. Поскольку вращающий момент двигателя пропорционален э. д. с. Е, то перегрузочная способность двигателя может быть повышена путем увеличения тока возбуждения. Это позволяет обеспечить устойчивую работу двигателя при значительных толчках нагрузки, а также при колебаниях напряжения сети.
Синхронный двигатель имеет два тормозных режима: рекуперативный и динамический. Рекуперативный режим возможен при частоте вращения ротора выше синхронной. При этом изменяется знак угла θ, электромагнитный момент становится тормозным. При динамическом торможении возбуждение двигателя сохраняется, как и в двигательном режиме, а обмотка статора отключается от сети и замыкается на тормозной резистор. Механические характеристики синхронного двигателя в этом режиме подобны характеристикам асинхронного двигателя при динамическом торможении.
Особенностью синхронного двигателя является то, что путем изменения тока возбуждения можно регулировать потребляемую из сети реактивную мощность. Это свойство синхронного двигателя широко используют для компенсации реактивных нагрузок металлургических цехов или всего завода.
В процессе изменения тока возбуждения вектор тока двигателя может совпадать с вектором напряжения сети, отставать от него или опережать его, В случае совпадения векторов тока и напряжения двигатель потребляет из сети только активную мощность. Когда вектор тока двигателя опережает вектор напряжения сети, двигатель отдает в сеть реактивную мощность. Таким образом, синхронный электродвигатель выполняет, помимо основной функции, также функцию синхронного компенсатора, что дает большой экономический эффект. Потребляемую из сети и выдаваемую в сеть реактивную энергию рассчитывают по формуле

где-Xd — поперечное индуктивное сопротивление статора. Положительное значение соответствует потреблению реактивной энергии из сети, отрицательное — выдаче реактивной энергии в сеть.








