 2020-09-27
2020-09-27 57
57РАЗДЕЛ 1. Обзор предметной области
Лесные пожары способствуют распространению вредных насекомых и дереворазрушающих грибов, ухудшают почвенные условия. Одним из факторов, приводящих к массовой гибели лесов и нарушениям окружающей среды, являются лесные пожары. Из-за лесных пожаров многие животные гибнут, другие переселяются с территорий пожарищ в другие места в поисках пропитания.
Необходимо правильно решить проблемы профилактики и тушения лесных пожаров, защиты от их неблагоприятных факторов, не допустить случаев гибели людей, снизить размеры наносимого лесными пожарами ущерба, предупредить и потушить пожары в лесах.
Наиболее сложной и трудоемкой является локализация пожара. Как правило, локализация лесного пожара проводится в два этапа.
На первом этапе осуществляется остановка распространения пожара путем непосредственного воздействия на его горящую кромку.
На втором этапе производится прокладка заградительных полос и канав, обрабатываются периферийные области пожара с целью исключения возможности возобновления его распространения. В связи с этим, большое значение приобретает изучение тактических и технологических приёмов тушения лесных, степных и торфяных пожаров, а также технических средств, необходимых для этой цели.
Такие знания необходимы для:
- грамотной защиты лесов от пожаров;
- умения организовать спасение расположенных в лесах и на торфяниках посёлков от неблагоприятных факторов пожарного воздействия;
- знания техники безопасности при тушении лесных, степных и торфяных пожаров.
Так как при локализации пожара воздух сильно задымлен, и есть большая вероятность пожарным отравиться угарным газом, хотя они и работают в масках, я решил собрать робота – помощника, который без непосредственного присутствия людей прокладывал бы заградительные канавы и полосу.
РАЗДЕЛ 2. Описание разработки
Действующуя модель робота – помощника(Рис. 2.1), служит для локализации пожара без непосредственного присутствия людей, прокладывая заградительные полосу и канавы.
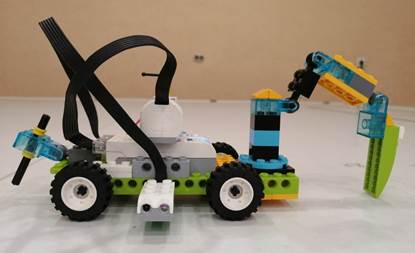
Рис. 2.1. Модель робота-помощника при пожаре
При создании модели робота–помощника при тушении пожара с помощью Lego WeDO 2.0, я применил ременную передачу, позволяющую модели двигаться, и использовал систему шарниров для опускания скребка и отвального плуга. Моя модель оснашена датчиком движения, позволяющим увидеть опасность и дать команду к остановке, опусканию ковша. На моделе установлена повышающая ременная передача, т.к. для прокладки траншеи роботу необходимо приложить максимальное усилие.
Программа работы модели состоит из 2-х блоков (Рис. 2.2).

Рис. 2.2. Программа работа модели
Первый блок:
¾ Начало работы.
¾ Включаем мотор с мощностью 5, т.к. модель не должна двигаться очень быстро, изучая окружающую ситуацию.
¾ При срабатывании датчика движения модель останавливается.
Второй блок отвечает за прокладывание заградительной полосы, канавы:
¾ Начало работы.
¾ Включаем мотор на максимальную скорость, что бы приложить максимальное усилие для прокладки заградительной полосы, канавы.
¾ Модель движется в обратном направлении с опущенным отвальным плугом.
¾ Движется до тех пор пока не закончатся работы.
¾ Останавливается.
ЗАКЛЮЧЕНИЕ
Конструктор Lego WeDo 2.0 позволяет воплощать задуманное в жизнь, дает возможность развивать творчество, позволяет использовать простые механизмы для создания двигающихся частей модели, прост в программировании.
Работая над поектом, я изучил материал по пожарам, их последствиям и методам борьбы сними. Это было очень полезно. Создавая модель, я использовал знания, полученные на занятиях по робототехнике.
Задачи, поставленные в начале работы выполнены полностью. Модели похожей на мою в интернете я не нашел и очень этим доволе.








