2020-10-10
2020-10-10 125
125Глобальные координаты определяются путем поворота и смещения локальных координат на каждой поверхности. Преобразование координат может быть записано следующим образом:
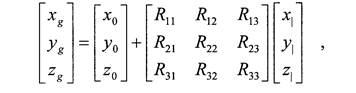
где подстрочный индекс "д" используется для обозначения глобальных координат, индекс "О" - для обозначения сдвига координатных систем и индекс "|" - для обозначения локальных координат. Матрица поворота R и вектор сдвига могут быть вычислены для любой поверхности, используя любую другую поверхность в качестве опорной для глобальной системы координат.
Матрица поворота позволяет понять ориентацию координатной системы поверхности по отношению к глобальной опорной поверхности. На локальной поверхности единичный вектор, ориентированный вдоль оси х, есть просто (1, 0, 0). Этот вектор можно повернуть, используя матрицу R, для ориентации оси х в глобальной системе координат. Умножение матрицы на каждый из трех единичных векторов дает:
7-10 Chapter 7: SYSTEM MENU
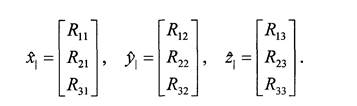
Заметьте, что единичные вектора, ориентированные вдоль осей локальной координатной системы, это просто столбцы в матрице R. Приводимые в списке "Prescription Data" величины "Global vertex coordinates" (координаты вершин поверхностей в глобальной системе координат), а также величины компонент матрицы поворота R и вектора сдвига - все относятся к глобальной опорной поверхности. Если поверхность является поверхностью типа "coordinate break", то в R-матрицу включаются эффекты сдвига и поворота координат. Если поверхность типа "coordinate break" выбрана в качестве опорной глобальной поверхности, то опорная координатная система определяется после децентрировки и поворота локальной координатной системы. Если матрица R вычисляется для поверхности типа "coordinate break" и эта поверхность предшествует опорной поверхности, то R матрица относится к системе, предшествующей трансформации координат. Если у Вас возникает на этот счет сомнение, просто введите пустую поверхность, не являющуюся поверхностью "coordinate break", в интересующее Вас место для проверки глобальной ориентации.
По умолчанию опорной поверхностью является поверхность №1, но любая другая поверхность может быть выбрана в качестве опорной (кроме поверхности объекта, если она удалена на бесконечно большое расстояние!).
Опорная поверхность используется также для определения точки совмещения zoom -позиций на трехмерных схемах.
Fields
Поля ________________________________________
Диалоговое окно "Fields" позволяет определить направления в поле зрения (точки поля или просто "поля"). Поля могут быть заданы углами, высотами объекта (для систем с конечным удалением) или высотами изображения. Электронные клавиши могут быть использованы для активизации и деактивизации позиций поля, а также для сортировки данных в порядке возрастания. Смотри главу "Conventions and Definitions", в которой описаны принятые соглашения относительно полей.
Vignetting factors