 2020-10-12
2020-10-12 277
277Статика
В теоретической механике различают три основных раздела: статику, кинематику и динамику. Статика изучает равновесие материальных тел, кинематика изучает геометрические параметры движения материальных тел, без учета сил действующих на тела, динамика изучает движение материальных тел в связи с действующими на них силами.
Основные понятия и аксиомы статики
Статикой называется раздел теоретической механики, изучающий равновесие твердых тел.
В статике рассматриваются две основные задачи:
1. Замена данной системы сил, приложенных к твердому телу, другой системой сил, ей эквивалентной
2. Вывод общих условий, при которых твердое тело под действием приложенных к нему сил остается в состоянии покоя или в состоянии равномерного прямолинейного поступательного движения (условие равновесия сил, приложенных к твердому телу)
Абсолютно твердое тело. Материальная точка. Система отсчета.
Абсолютно твердое тело – тело, расстояния между каждыми двумя точками которого остаются всегда неизменными (тело не деформируется, т.е сохраняет свою геометрическую форму)
Далее в процессе изучения динамических задач необходимо ввести понятие материальной точки. Под материальной точкой в теоретической механике понимают тело, размеры которого по всем направлениям очень малы, так что различием в движении этих точек можно пренебречь.
Любое механическое движение материальной точки или материального тела конечных размеров можно наблюдать и изучать только по отношению к какому-нибудь другому физическому телу, например по отношению к Земле. При этом положение наблюдаемого объекта относительно другого физического тела определяется в механике при помощи некоторой выбранной системы координат, неизменно связанной с этим физическим телом. Система координат, неизменно связанная с каким-нибудь физическим телом, относительно которого определяется положение данного движущегося объекта, называется системой отсчета.
Система отсчета, по отношению к которой справедливы законы классической механики называется инерциальной системой отсчета. Систему отсчета, связанную с Землей, можно с большой степенью точности считать инерциальной системой. Поэтому в статике мы всегда будем пользоваться системой отсчета, неизменно связанной с Землей. Поэтому, когда в статике мы говорим, что данное тело находится в равновесии, т.е. что под действием приложенных к нему сил тело остается в покое или движется поступательно, равномерно и прямолинейно. То здесь имеется в виду покой или движение тела по отношению к выбранной нами инерциальной системе отсчета (закон инерции), т.е. по отношению к Земле.
Понятие силы
Понятие силы является одним из основных понятий механики. Действие силы на данное абсолютно твердое тело определяется следующими тремя факторами:
1. Точкой приложения силы;
2. Направлением силы;
3. Численным значением силы;
Точкой приложения силы называется та материальная точка данного тела, на которую эта сила действует (которой непосредственно передается движение от другого тела).
Под направлением данной силы понимают направление того движения, которое получает под действием этой силы материальная точка, вначале находившаяся в покое. Прямая, по которой направлена данная сила, называется линией действия этой силы; так, например, сила тяжести направлена по вертикали вниз.
Найти численное значение данной силы – это значит сравнить ее с некоторой силой, принятой за единицу. В системе СИ в качестве единицы силы принят Ньютон  . Несистемная техническая единица силы кгс
. Несистемная техническая единица силы кгс  .
.
Сила представляет собой векторную величину, так как эффект действия силы на тело определяется не только ее численным значением, но и направлением. Поэтому графически силы изображаются в виде векторов. При этом длина вектора выражает в заданном масштабе численное значение (модуль) данной силы, прямая, на которой расположен вектор, и его направление указывают линию действия и направление силы, а начало вектора определяет точку приложения силы.
Условимся обозначать вектор одной жирной буквой или двумя светлыми (начало и конец вектора) с черточкой наверху. Модуль вектора будем обозначать той же светлой буквой или теми же двумя буквами, но без черточки наверху. Например модуль вектора Р равен Р или  .
.
Аксиомы статики
Совокупность сил, приложенных к данному твердому телу, называется системой сил.
Если под действием данной системы сил твердое тело остается в покое (по отношению к выбранной инерциальной системе отсчета) или движется поступательно, равномерно и прямолинейно, т.е. так, что все его точки движутся по прямым линиям с одинаковой постоянной скоростью, то такое состояние тела называется состоянием равновесия, а приложенная к нему система сил называется уравновешивающей системой. Одна из сил уравновешивающей системы называется уравновешивающей по отношению ко всем остальным.
Если одну систему сил, приложенных к твердому телу, можно заменить другой системой, не нарушая при этом его покоя или не изменяя его движения, то такие системы сил называются эквивалентными. Если данная система сил эквивалентна одной силе, то эта сила называется равнодействующей данной системы сил.
В основе статики лежат некоторые элементарные положения, которые называются аксиомами.
Аксиома 1 Для равновесия двух сил, приложенных к абсолютно твердому телу, необходимо и достаточно, чтобы эти силы были равны по модулю и направлены по прямой, соединяющей их точки приложения, в противоположные стороны.
Аксиома 2 Не изменяя действия данной системы сил на абсолютно твердое тело, можно прибавить к этой системе или отнять у нее две уравновешивающие силы, т.е. две силы равные по модулю и направленные по одной прямой в противоположные стороны.
Следствие 1 Не изменяя действия одной силы на тело, точку приложения этой силы можно переносить по ее линии действия (рис.1.1)

Рис.1.1.
Следствие 2 Если к телу приложена уравновешивающая система сил, то одна из этих сил, взятая в обратном направлении является равнодействующей всех сил.
Аксиома 3 Равнодействующая двух сил, приложенных к абсолютно твердому телу в одной точке, равна их геометрической сумме, т.е. выражается по модулю и направлению диагональю параллелограмма, построенного на этих силах (рис.1.2)
Если обозначим через R равнодействующую двух данных сил F1 и F2, на основании этой аксиомы имеем:  Знак + здесь обозначает операцию геометрического сложения.
Знак + здесь обозначает операцию геометрического сложения.
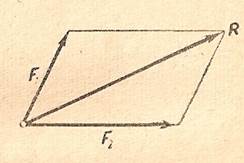
Рис.1.2.
Теорема. Если три непараллельные силы, лежащие в одной плоскости, уравновешиваются, то их линии действия пересекаются в одной точке.
Доказательство. Пусть данное тело находится в равновесии под действием трех сил F1, F2 и F3,приложенных в точках А1, А2 и А3 (рис.1.3) Продолжим линии действия сил F1 и F2 до их пересечения в точке В; перенесем их точки приложения в точку В и сложим эти силы по правилу параллелограмма; получим равнодействующую силу R.
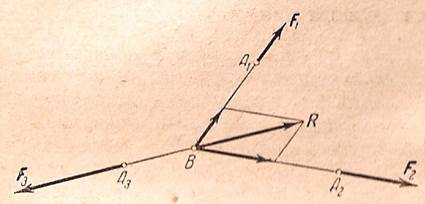
Рис.1.3.
Если заменить силы F1 и F2 одной эквивалентной им силой R, то равновесие не нарушится; следовательно, силы R и F3 также уравновешиваются, а потому эти две силы должны быть равны по модулю, и направлены по одной общей прямой в противоположные стороны (аксиома 1). Поэтому линия действия силы F3 совпадает с линией действия силы R и, следовательно, проходит через точку В, что и требовалось доказать.
Аксиома 4 Силы, с которыми действуют друг на друга два тела, всегда равны по модулю и направлены по одной прямой в противоположные стороны.
Этот закон был сформулирован впервые Ньютоном в его «Началах» и называется законом равенства действия и противодействия. Важно заметить, что действие и противодействие представляют собой две силы, приложенные к двум разным телам. Поэтому нельзя сказать, что эти две силы уравновешиваются в том смысле, как это говорят о двух численно равных силах, приложенных к одному и тому же твердому телу и направленных по одной прямой в противоположные стороны.
Аксиома 5 Если деформируемое (не абсолютно твердое) тело, находящееся под действием данных сил в состоянии равновесия, станет абсолютно твердым (отвердеет), то его равновесие не нарушится.
Этот закон называется принципом отвердевания; он имеет значение при изучении равновесия деформируемых тел. Из этого закона следует, что условия, которым должны удовлетворять при равновесии силы, приложенные к абсолютно твердому телу, необходимо должны соблюдаться и при равновесии деформируемого тела.
Связи и реакции связей
Если данное твердое тело может получить любое перемещение в пространстве, то такое тело называется свободным. Если тело поставлено в такие условия, при которых некоторые перемещения для него становятся для него невозможными, то такое тело называется несвободным. Эти условия, ограничивающие свободу движения тела, называются связями. Связи в статике, практически осуществляются при помощи материальных тел. Сила, с которой тело осуществляющее связь, действует на данное рассматриваемое тело, препятствуя его перемещению в том или ином направлении, называется реакцией этой связи.
Направление реакции связи противоположно тому направлению, по которому связь препятствует двигаться данному телу (следствие аксиомы 4).
Все силы, действующие на твердое тело, можно разделить на две группы: силы активные и реакции связей. Т.о. если сила не является реакцией связи, то она является активной силой.
Несвободное твердое тело можно рассматривать как свободное, если его мысленно освободить от связей, заменив действие связей соответствующими реакциями связей.
В задачах статики почти всегда приходиться рассматривать равновесие несвободного тела, т.е. тела, так или иначе закрепленного или имеющего ту или иную опору. В зависимости от характера закрепления тела или от вида опоры можно указать следующие основные типы связей:
1. Тело опирается на неподвижную поверхность в точке А (рис.1.4); в этом случае реакция опорной поверхности приложена к телу в точке А и направлена при отсутствии трения по нормали к опорной поверхности в этой точке. Поэтому эта сила называется нормальной реакцией.
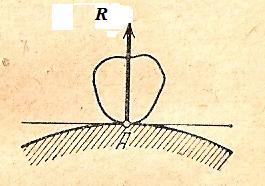
Рис.1.4.
2. Тело опирается в точках А и В (рис.1.5) на ребра двугранных углов, а в точке С – на гладкую поверхность.


В этом случае для определения направления реакций связи в точках А и В следует применить метод обращения, т.е. представить, что двугранный угол опирается на твердое тело (рис.1.6), являющееся для него связью, т.е. опорная реакция R' направляется по соответствующей нормали. Снова обратив задачу, определяют искомое направление реакций в точках А и В, причем на основании закона равенства и противодействия (аксиома 4):  ,
,  . Реакция RС в соответствии со случаем 1, направляется перпендикулярно к горизонтальной плоскости.
. Реакция RС в соответствии со случаем 1, направляется перпендикулярно к горизонтальной плоскости.
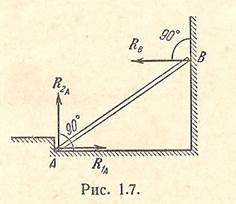
3. Тело упирается острием в угол (например, внутрь двугранного угла рис.1.7). В этом случае, связь следует рассматривать как двойную: Угол А препятствует перемещению твердого тела по горизонтали налево и по вертикали вниз. Поэтому две составляющие опорной реакции R1 А и R 2А следует направить противоположно этим перемещениям: первую направо, вторую вверх.
4. Связь осуществляется при помощи гибкого тела (нити, каната, цепи). Реакция такой связи приложена к телу в точке крепления нити и направлена вдоль этой нити (рис.1.8). Силы Т1 и Т 2 изображают реакции нитей, на которых подвешено данное тело.

Рис.1.8.
5. Связь осуществляется при помощи неподвижного цилиндрического шарнира, представляющим собой совокупность неподвижного вала А и надетой на него втулки В, соединенной со стержнем D. Тело, жестко скрепленное со стержнем, может только вращаться вокруг оси шарнира, перпендикулярной плоскости рисунка 1.9.

Рис.1.9.
Если пренебречь трением в шарнире, то реакция тела направлена по нормали к его цилиндрической поверхности в той точке, где поверхность втулки В прижимается к валу А и, следовательно, лежит в плоскости перпендикулярной к оси вала. Таким образом, если связь осуществлена посредством неподвижного цилиндрического шарнира, вокруг оси, которого тело может вращаться, то направление реакции R такой связи заранее указать нельзя; эта реакция может иметь любое направление перпендикулярное к оси шарнира, в зависимости от положения данного тела и приложенных к нему других сил. При решении задач реакция R заменяется взаимно перпендикулярными составляющими R1 и R 2. Определив в ходе решения задачи R1 и R 2, находят модуль и направление реакции R.
6. Связь осуществляется при помощи сферического шарнира (рис.1.10). В этом случае тело может перемещаться так, что точка О (центр сферического шарнира) остается неподвижной.

Направления реакции R и в этом случае заранее указать нельзя; эта реакция нормальная к поверхности сферического шарнира, может быть направлена по любой нормали к этой сферической поверхности, т.е. по любой прямой, проходящей через неподвижную точку О.
При решении задач реакция R заменяется тремя взаимно перпендикулярными составляющими R1,R 2 и R 3 (рис.1.11).

7. Если абсолютно жесткий невесомый прямолинейный стержень, концы которого соединены шарнирами с другими частями конструкции, находятся в равновесии под действием сил, приложенных по его концам, то следует реакции направить вдоль стержня.
Если к стержню со стороны других частей конструкции приложены силы в каждом из его концов (шарнирах), то после сложения сил в каждом из шарниров будет приложено по одной силе, в результате действия которых стержень будет находиться в равновесии. Согласно аксиоме 1 силы эти равны по модулю и направлены в противоположные стороны по общей линии действия, т.е. вдоль стержня.

Рис.1.12
При этом стержень может подвергаться растяжению силами F 1 и F ’1 (рис.1.12а) или сжатию F 2 и F ’2 (рис.1.12б), причем  и
и  . Если стержень подвержен растяжению, то реакции стрежня T1 и Т’1, приложенные к шарниру направлены вдоль стержня друг к другу. Если стержень подвержен сжатию, то реакции S2 и S’2, приложенные к шарнирам, направлены вдоль стержня друг от друга.
. Если стержень подвержен растяжению, то реакции стрежня T1 и Т’1, приложенные к шарниру направлены вдоль стержня друг к другу. Если стержень подвержен сжатию, то реакции S2 и S’2, приложенные к шарнирам, направлены вдоль стержня друг от друга.








