 2014-02-05
2014-02-05 2787
2787Рычаг; 3-шток исполнительного ме- 2-золотник; 3-пружина обратной связи; 4-
Рис.4.19.Схема гидравлического привода с золотниковым распределителем
Раздел 4.Лекция 3. Пневматические и гидравлические исполнительные устройства
ПНЕВМАТИЧЕСКИЕ ИСПОЛНИТЕЛЬНЫЕУСТРОЙСТВА. Пневматические исполнительные механизмы изготавливаются поршневого и мембранного типов.
Исполнительные механизмы поршневого типа состоят из пневмоцилиндра и поршня со штоком. Такие ИМ часто называют приводами следящими пневматическими.
В автоматических системах наиболее широкое применение находят мембранные исполнительные механизмы. Мембранные прямоходные исполнительные механизмы, пружинные МИМ и МИМП. Механизмы выпускаются прямого (модификации МИМ ППХ) и обратного (модификации МИМ ОПХ и МИМП ОПХ) действия. Общий вид исполнительных механизмов представлен на рис. 4.16.
Механизмы МИМП развивают повышенное перестановочное усилие по сравнению с механизмами МИМ. В рабочую полость механизма подается сжатый воздух, в результате чего на мембране возникает сила, воспринимаемая пружиной. При этом шток перемещается на расстояние, пропорциональное жесткости пружины.
Основными конструктивными элементами механизма являются (рис. 4.16, а): мембранная пневматическая камера механизма прямого действия, состоящая из крышек 1 и 3, мембрана 2, образующая герметичную рабочую полость. Крышка 3 прикреплена к кронштейну 5. Подвижная часть состоит из опорного диска 4, к которому прикреплена мембрана 2 штока 7 с соединительной гайкой 10 и пружины 6.
Пружина одним концом упирается в опорный диск, другим через опорное кольцо 8 в регулировочную гайку 9, служащую для изменения начального натяжения пружины и направления движения штока. Гайка 10 служит для соединения штока механизма со штоком регулирующего органа.
Мембранную пневматическую камеру механизма обратного действия образует крышка 3, вставка 5 (рис. 4.16, б) и мембрана 2. Крышка 3 и вставка прикреплены к кронштейну. Пружина одним концом упирается во вставку. Конструктивное назначение остальных деталей аналогично назначению деталей механизма прямого действия.
Максимально допустимое давление сжатого воздуха в рабочей полости механизмов при диаметре заделки i6o мм о,4 МПа; при диаметре 200 мм и более - 0,26 МПа. Полный ход выходного элемента механизма МИМ без позиционера и механизма МИМП с позиционером при изменении пневматического сигнала от 20 до 140 кПа и от 100 до 230 кПа соответственно.
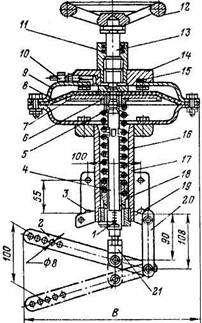
Мембранные исполнительные механизмы качающегося действия типа МИМ-К, общий вид одного из которых изображен на рис. 4.17, давление пневматического командного сигнала воспринимают резиновой мембраной 8, закрепленной между крышками 9. Деформируясь, мембрана через диск у, втулку 5 и гайку 6 передает движение штоку 4 нижний конец которого перемещает рычаг
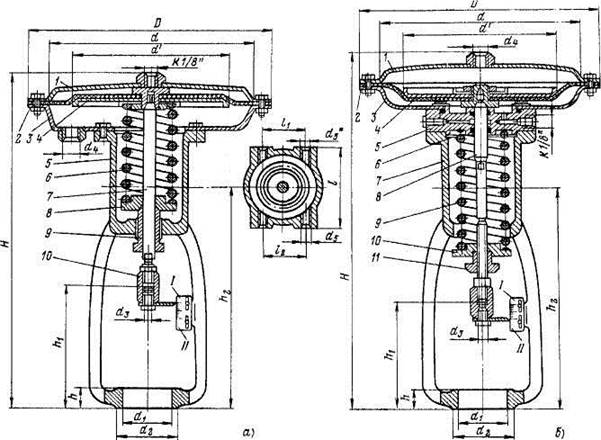 Рис. 4.16. Мембранные исполнительные механизмы МИМ или МИМП прямого действия:
Рис. 4.16. Мембранные исполнительные механизмы МИМ или МИМП прямого действия:

 а) МИМ ППХ: 1 - крышка верхняя; 2 - мембрана; з - крышка нижняя; 4-Диск;5-кронштейн; 6-пружина; 7-шток; 8 -кольцо опорное; д- гайка регулировочная; 10- гайка обратного действия; б) МИМ ОПХ: 1 - крышка верхняя; 2 - мембрана; 3 ~ крышка нижняя; 4 - диск; 5 - вставка; 6 - кольцо уплотнительное; 7- кронштейн; 8 - шток; 9 - пружина; 10 - кольцо опорное; 11 - гайка регулировочная; два отверстия: I - открыто, II - закрыто
а) МИМ ППХ: 1 - крышка верхняя; 2 - мембрана; з - крышка нижняя; 4-Диск;5-кронштейн; 6-пружина; 7-шток; 8 -кольцо опорное; д- гайка регулировочная; 10- гайка обратного действия; б) МИМ ОПХ: 1 - крышка верхняя; 2 - мембрана; 3 ~ крышка нижняя; 4 - диск; 5 - вставка; 6 - кольцо уплотнительное; 7- кронштейн; 8 - шток; 9 - пружина; 10 - кольцо опорное; 11 - гайка регулировочная; два отверстия: I - открыто, II - закрыто
Рис. 4.17. Мембранные исполнительные механизмы качающегося действия МИМ-К:
1 - шкала; 2 - рычаг; з - гайка регулировочная; 4 - шток; 5 - втулка; 6- гайка; 7- диск; 8 - мембрана; 9 - крышки (верхняя и нижняя); 10- гайка накидная; и, lg - кольцо уплотнительное; 12 - маховик; 13 - винт; 14- корпус дублера; 16- пружина; 17- корпус; 18- фасонная втулка; 19, 21- серьга; 20 - тяга; 22 - позиционер
2, соединенный с регулирующим органом. Перемещению штока противодействует пружина 16, упирающаяся в гайку и фасонную втулку 18 корпуса 1 7. Перемещения штока зависят от силы, развиваемой мембраной, которая компенсируется сжатием пружины. Положение штока контролируется по шкале на корпусе 17. Фасонная втулка 18 служит для регулировки числа рабочих витков пружины.
Для повышения быстродействия, точности и создания дополнительного мембранного механизма в случае появления на затворе регулирующего органа больших неуравновешенных усилий служит позиционер 22.
Для управления механизмом в случае отсутствия сжатого воздуха служит верхний ручной дублер, который состоит из корпуса щ, винта 13 и маховика 12. Пневматические камеры механизма уплотняются резиновыми кольцами а и 15. Трубки пневматического командного сигнала закрепляются гайкой 1 о. Рычажная система механизма состоит из деталей 19-21. Усилие, развиваемое перечисленными механизмами, составляет от 1,6 до 8,25 кН.
Преимущество мембранно-пружинных исполнительных механизмов заключается в простоте устройства и обслуживания, однако они имеют ограниченное по величине перестановочное усилие.
В табл.4.3 приведены габаритные и присоединительные размеры исполнительных механизмов МИМ и МИМП.
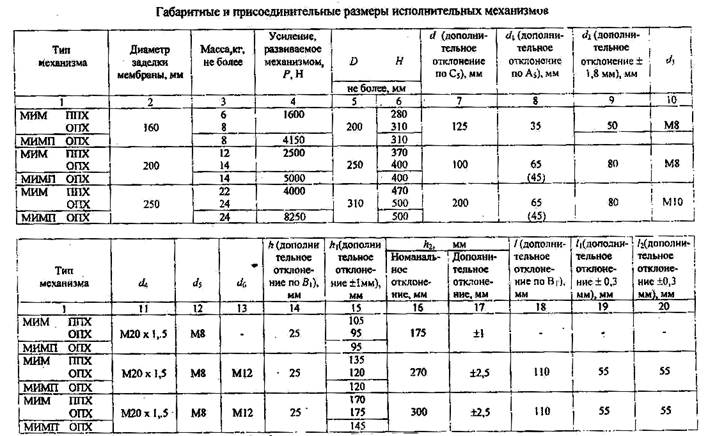 Таблица 4.3
Таблица 4.3
В табл.4.4 приведены габаритные и присоединительные размеры исполнительных механизмов МИМ-К.
Исполнительные механизмы поршневого типа отличаются от мембранных большой величиной перемещения рабочего штока (до 400 мм) и значительным развиваемым усилием (до 5-20 кН). Конструктивно поршневой пневмопривод типа ПСП выполняется с цилиндром одно- или двухстороннего действия. Поршневой пневмопривод рассчитан на рабочее давление воздуха 0,4 - 0,8 МПа при командном 20 - 100 кПа.
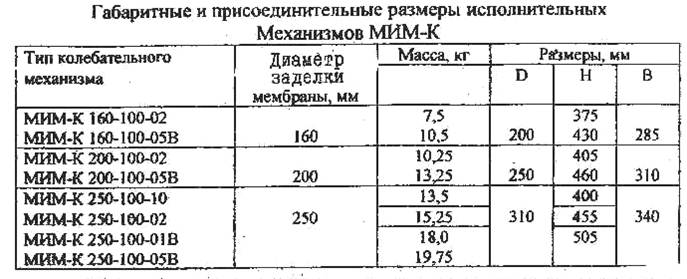 Таблица 4.4
Таблица 4.4
ГИДРАВЛИЧЕСКИЕ ИСПОЛНИТЕЛЬНЫЕУСТРОЙСТВА. Для управления механизмами, требующими больших перестановочных усилий, применяют гидравлические сервоприводы двух видов: поршневые с поступательным движением штока и кривошипные с поворотным рычагом (рис. 4.17).
Кривошипный исполнительный механизм работает следующим образом. В цилиндр 1 подводится масло через штуцеры 8. При появлении разности давлений по сторонам поршня 2 возникает усилие, вызываемое движением поршня. Кривошипно-шатунный механизм (шатун 3, кривошип 6) преобразует поступательное движение поршня во вращательное движение вала 5 и рычага 7. Пробка 4 служит для удаления воздуха из корпуса привода. Привод прикреплен с помощью плиты 9.
При смещении плунжера золотникового преобразователя (рис. 4.18) от нейтрального положения в зависимости от знака рассогласования масло направлено в одну из двух полостей исполнительного механизма, который перемещает регулирующий орган. При равенстве нулю сигнала рассогласования плунжер золотникового преобразователя занимает нейтральное положение и исполнительный механизм останавливается. Настройку скорости исполнительного механизма осуществляют изменением дросселирования потока масла от регулятора.
Схема золотникового преобразователя показана на рис. 4.18. Он состоит из цилиндра з с двумя поршнями 2, соединенными плунжером 1.
Во внутреннюю полость цилиндра через среднее окно поступает масло от насоса; два крайних окна трубами связаны с исполнительным механизмом. При перемещении плунжера 1 поршни 2 смещаются с нейтрального положения, открывая окна в цилиндре. Масло через одно окно направляется к исполнительному механизму, через другие от исполнительного механизма поступает на слив. Отклонение поршней от нейтрального положения приводит к изменению площади проходного сечения окон в цилиндре и дросселированию потока жидкости. При постоянном давлении питания расход масла через окна зависит от открытия окон в цилиндре.
 Рис. 4.17. Гидравлические исполнительные механизмы: а - кривошипный; б- прямоходный
Рис. 4.17. Гидравлические исполнительные механизмы: а - кривошипный; б- прямоходный
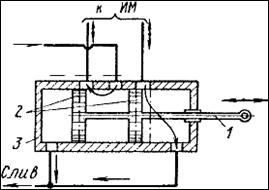 Рис. 4.18. Схема золотникового преобразователя
Рис. 4.18. Схема золотникового преобразователя
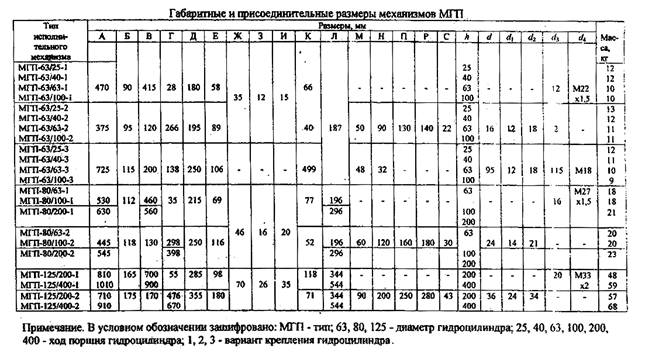
Промышленностью выпускаются гидравлические исполнительные механизмы с диаметром поршня 80, 120 и 150 мм при давлении масла 1,2 МПа с развитием усилия на выходе соответственно 5,2; 12,2; 19,5 кН (тип СПГП) и 0,78; 1,0; 2,75 кН (СПГК), а также механизмы МГП с диаметром гидроцилиндра 63, 80 и 125 мм при ходе поршня 25,4, 63, 100, 200, 400 мм с развитием усилия до 20 кН.
Время работы исполнительного механизма этого типа возрастает при повышении нагрузки, так как требуется увеличивать разность давления. Гидропривод является инерционным прибором и применяется в системах, где особого быстродействия не требуется.
На рис.4.19 дана принципиальная схема гидравлического привода с золотниковым распределителем.
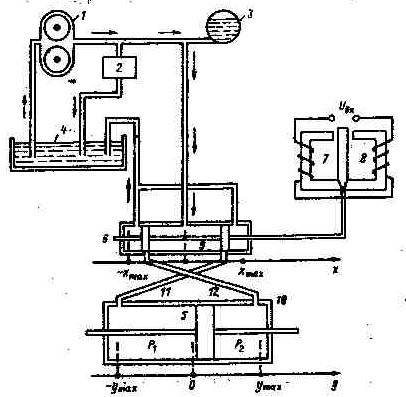
Гидравлический шестерёнчатый насос 1, приводимый в движение обычно электродвигателем, обеспечивает подачу жидкости с постоянной скоростью в аккумулятор давления 3. Давление жидкости составляет 150-280 атм. После того как давление в аккумуляторе достигнет определённого значения, клапан 2 переключает в золотниковый распределитель 6. При отсутствии входного сигнала Uвх, подаваемого на обмотку электромагнита 7, его якорь8 находится в нейтральном положении и золотник 9 закрывает доступ жидкости в рабочий цилиндр 10. При наличии входного сигнала электромагнит 7 поворачивает якорь 8, перемещая связанный с ним золотник 9. Смещение золотника вправо открывает доступ для рабочей жидкости через канал 11 в рабочий цилиндр 10. Одновременно открывается доступ для рабочей жидкости, находящейся справа от поршня, в канал 12 и далее на слив в резервуар 4. Под действием разности давлений рабочей жидкости поршень 5 перемещается вправо. Выходной величиной гидродвигателя является перемещение штока, жёстко связанного с поршнем 5. В нейтральном положении золотник 9 перекрывает оба канала 11, 12 и поршень находится в заторможенном состоянии. Динамические свойства гидропривода характеризуются тремя дифференциальными уравнениями: уравнением, связывающим перемещение золотника х и перемещение поршня гидродвигателя у; уравнением движения поршня золотника; уравнением, связывающим ток управления с выходным напряжением Uвых.
Гидропривод является сложной нелинейной системой, исследовать которую можно только на ЭВМ. Примерная структурная схема гидропривода применительно к толкателю ЭПС дана на рис.4.20.

Рис.4.20.Структурная схема гидропривода
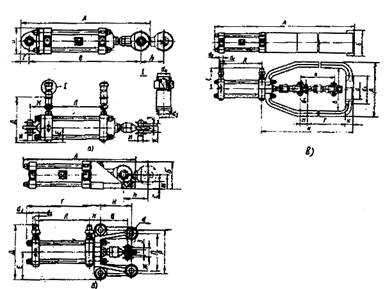
В системах автоматизации наиболее широкое применение находят гидравлические ИМ поршневого типа МГП. Механизмы МГП предназначены для управления рабочими органами поворотного (не более 90о) или возвратно-поступательного движения используются в автоматических системах регулирования и управления производительными процессами (рис.4.21).
Исполнительный механизм гидравлический поршневого типа МГП состоит из гидроцилиндра и узлов крепления его к фундаментальной плате и к регулирующему органу.
Рис.4.21.Габаритные и присоединительные размеры гидравлических исполнительных механизмов МГП (без дополнительных блоков): а – вариант крепления 1; б – вариант крепления 2; в – вариант крепления 3
В табл.4.5 представлены габаритные и присоединительные размеры механизмов МГП.
Общие положения. Для уменьшения зоны гистерезиса и улучшения динамических и технических характеристик мембранные исполнительные механизмы комплектуют дополнительными блоками: различного рода усилителями, сигнализаторами крайних положений.
Наиболее важные дополнительные блоки – это усилители. Они существенно влияют на работу исполнительного устройства, изменяя его статические и динамические характеристики. При охвате усилителя обратной связью по какой-либо выходной величине он выполняет функцию регулятора эти величины и называется позиционером (рис.4.22 и 4.23).
 Рис.4.22.Принципиальная схема позиционера Рис.4.23.Принципиальная схема позиционера
Рис.4.22.Принципиальная схема позиционера Рис.4.23.Принципиальная схема позиционера
с компенсацией перемещений: с компенсаций усилий:
1-сильфон (чувствительный элемент); 1–мембрана (чувствительный элемент);
ханизма; 4-мембранная камера; 5-зо- толкатель; 5-мембранная камера; 6-шток
На рис.4.22 показана принципиальная схема следящего поршневого привода. Он состоит из мембранного блока 1 с большой 2 и мало 3 мембранами, золотника 6 с тремя щелями, поршневого механизма 5 и пружины отрицательной обратной связи 4. При увеличении входного давления Р золотник смещается влево, и давление питания Р 0 передаётся в левую полость цилиндра 5, перемещая площадь вправо и увеличивая натяжение пружины отрицательной обратной связи 4 до тех пор, пока не достигнет равновесие сил, действующих на мембранный блок 2 и 3.
Поршневые следящие приводы обладают зоной нечувствительности не более 1%, а время полного перемещения штока составляет несколько секунд.
В качестве чувствительных элементов, предназначенных для восприятия импульсов по давлению и преобразования их в усилия, передаваемые через систему рычагов на струйную трубку гидравлического усилителя, применяют импульсные сильфонные устройства и импульсные устройства с мембраной. Исполнительные механизмы гидравлических регуляторов выпускаются с прямолинейным перемещением штока (ход штока 200 мм) и с кривошипом (угол поворота 90о).
К вспомогательному оборудованию гидравлических регуляторов относятся фильтры для очистки масла, клапанные распределительные устройства, краны дистанционного управления, маслонапорные установки и др.
Контрольные вопросы.








