 2014-02-02
2014-02-02 5081
5081В рассмотренном ранее двигателе трехфазной системой токов статора создавался магнитный поток с одной парой полюсов (р= 1). Этот магнитный поток за время одного периода Т совершал один оборот, т. е. поворачивался на угол, соответствующий одной паре полюсов.
Обмотка статора может быть уложена в пазы так, что пар полюсов будет две, три или больше (р =2, 3,...). В действительности число пазов всегда значительно больше и в каждом пазу находится много проводников, образующих большое число последовательно или параллельно соединенных витков.
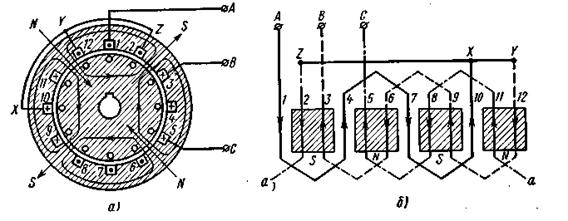
Если рассмотреть развертку внутренней поверхности такого статора с проводниками, уложенными в пазах (рисунок б), схему соединения проводников обмотки и направление токов в них для момента времени t3, когда ток iA положительный, а токи iв и ic отрицательные, то видно, что направление тока в каждых трех соседних проводниках одинаково (тройки 3, 4, 5; 6, 7, 8; 9, 10, 11; 12, 1, 2), а созданный токами статора магнитный поток имеет две пары полюсов (р = 2).
За время одного периода магнитный поток двухполюсного двигателя повернется на половину оборота, так как одна пара полюсов занимает половину окружности статора. В общем случае, когда двигатель имеет р пар полюсов, магнитный поток совершит 1/ р оборота за период Т. В каждую секунду имеем f периодов. Следовательно, магнитный поток совершит f/p оборотов в секунду. В технике принято определять частоту вращательного движения числом оборотов в минуту. Получаем выражение для частоты вращения магнитного потока статора в следующем виде:

Частота вращения магнитного потока зависит от частоты приложенного к обмоткам статора напряжения и числа пар полюсов, создаваемых обмоткой статора. В нормальных условиях эксплуатации электроустановок частота f поддерживается постоянной. Для двигателя число пар полюсов также постоянно. Поэтому частота вращения магнитного потока оказывается постоянной, а так как она определяется частотой напряжения сети, ее называют синхронной частотой вращения.
Большинство асинхронных двигателей работает при промышленной частоте f =50 Гц, которая постоянна. Поэтому для них существует шкала синхронных частот вращения, определяемых как

При р, равном 1, 2, 3, 4, 5, 6, частота n1 соответственно равна 3000, 1500, 1000, 750, 600 и 500 об/мин.
Чтобы возникали сила F и вращающий момент, действующий на ротор, частота его вращения должна быть п2<n1. Степень отставания ротора от вращающегося магнитного потока называется скольжением асинхронного двигателя. Скольжение обозначают s и выражают в относительных единицах или в процентах:
 или
или 
Чем больше тормозной момент, создаваемый на валу двигателя, тем меньше частота вращения ротора п2 и больше скольжение s. Именно потому, что частота вращения ротора изменяется с изменением нагрузки и не равна синхронной частоте, двигатель называется асинхронным.
В режиме двигателя скольжение s изменяется от 0 до 1. При пуске двигателя п2= 0 и s =1. При номинальной нагрузке для современных двигателей s =0,03÷0,06=3÷6%. В паспорте двигателя указывают номинальную частоту вращения ротора, отличающуюся от синхронной на 3÷6%. По этим данным всегда легко определить число пар полюсов двигателя. Например, если п2= 1450 об/мин, то, n1 =1500 об/мин, s =3,3%, а р =2.

