 2014-02-03
2014-02-03 5379
5379(вводная лекция)
В объемных гидравлических машинах передача механической энергии жидкости осуществляется изменением объемов их рабочих камер. Например, вытеснение (нагнетание) жидкости в объемных насосах происходит в результате уменьшения, а всасывание – в результате увеличения геометрических размеров рабочих камер насоса. В гидродвигателях (например, гидроцилиндрах) рабочий ход осуществляется в результате увеличения этих камер под действием поступающей в эти камеры жидкости.
Гидравлическая система, включающая в себя насос и гидродвигатель с соответствующей предохранительной и регулирующей аппаратурой, служит для передачи посредством жидкости энергии на расстояние. Из всех потенциальных энергий жидкости в гидросистемах (гидропередачах), как правило, используется потенциальная энергия давления жидкости.
Источником расхода жидкости в гидросистеме в большинстве случаев является насос возвратно-поступательного или вращательного движения.
Насосом называется гидромашина, преобразующая механическую энергию в гидравлическую (энергию жидкости под давлением).
Гидродвигателем называется гидромашина, осуществляющая обратное преобразование энергии.
Потенциальной энергией положения в гидросистемах (гидропередачах) обычно пренебрегают, поскольку разности высот между отдельными элементами гидросистемы несоизмеримо малы по сравнению с действующими в ней статическими давлениями жидкости. В большинстве случаев пренебрегают и кинематическим видом энергии, хотя эта энергия в виде скоростного напора, выражаемого  , используется в ряде элементов гидроавтоматики и регулирующей аппаратуры.
, используется в ряде элементов гидроавтоматики и регулирующей аппаратуры.
Основными преимуществами гидравлических приводов являются малые габариты и малая удельная масса, приходящаяся на единицу передаваемой мощности (в современных ЛА – это 0,2 … 0,3 кг на 1 кВат передаваемой мощности.
Преимуществом гидравлических приводов является возможность непрерывного (бесступенчатого) регулирования в широком диапазоне выходной скорости и осуществления высокой степени ее редукции, а также простота управления, плавность, равномерность и устойчивость движения и большой срок службы гидроагрегатов. При применении гидроприводов конструктивно просто решается задача защиты системы от перегрузок. Насосы и гидродвигатели авиационных гидросистем имеют высокие коэффициенты полезного действия. Вместе с тем гидроприводы просты в изготовлении и в эксплуатации. На современных ЛА гидроприводы являются незаменимыми в системах, где требуется развить большие усилия и высокое быстродействие: в системах шасси и системах торможения колес шасси, в системах управления, изменения стреловидности крыла сверхзвуковых самолетов, изменения геометрии воздухозаборников авиадвигателей в зависимости от режима полета, в системах наведения вооружения и т. д.
Принцип действия гидропривода.
Действие объемных гидроприводов основано на практической несжимаемости рабочей жидкости и преобразовании сил по закону Паскаля.
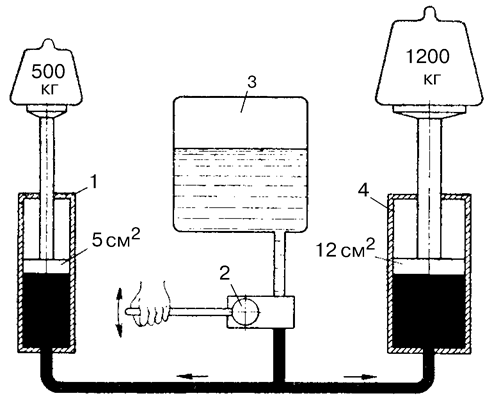 |
Для иллюстрации этого положения рассмотрим схему, представленную на рис. 1.
Рис. 1. К определению сил, действующих в гидросистеме:
1 – гидроцилиндр; 2
Система состоит из двух цилиндров 1 и 4 с разными площадями поршней, нагруженных грузами, и ручного насоса 2, выходной канал которого связан с цилиндрами, а входной – с резервуаром 3. При условии, что площадь поршня цилиндра 1 равна 5 см2 и цилиндра 4 – 12 см2 массы удерживаемых грузов при давлении жидкости, развиваемыми насосом в 100 кГс/см2, соответственно будут равны  = 500 кг и
= 500 кг и  = 1200 кг.
= 1200 кг.
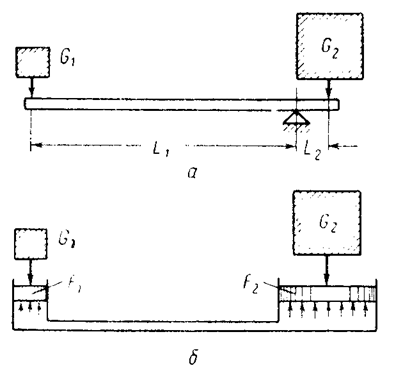
Равновесие сил, действующих в рассматриваемой схеме, можно сравнить с равновесием обычного коромысла с нагрузкой и , приложенной по его концам (рис. 2, а). Длины плеч  и
и  коромысла и величины грузов и связаны отношением
коромысла и величины грузов и связаны отношением
 .
.
Соответственно для гидравлической схемы (рис. 2, б), состоящей из двух цилиндров площадью  и
и  , поршни которых нагружены грузами и , эти параметры связаны соотношением
, поршни которых нагружены грузами и , эти параметры связаны соотношением
 |
 .
. Рис. 2. Соотношение сил:
а – в механической системе; б – в гидросистеме
Из этого соотношения следует, что при соответствующем выборе площадей цилиндров представляется возможным уравновесить большой груз малым грузом .
Для нахождения основных кинематических и силовых зависимостей рассмотрим расчетную схему, представленную на рис. 3. Два цилиндра 1 и 2, заполненные жидкостью, соединены трубопроводом. Поршень первого цилиндра нагружен силой  , развиваемой усилием, приложенным к ручке 3. Поршень второго цилиндра – внешней нагрузкой в виде силы
, развиваемой усилием, приложенным к ручке 3. Поршень второго цилиндра – внешней нагрузкой в виде силы  . В соответствии с законом Паскаля давление в цилиндрах 1 и 2 будет одинаковым:
. В соответствии с законом Паскаля давление в цилиндрах 1 и 2 будет одинаковым:  . Диаметры цилиндров равны соответственно
. Диаметры цилиндров равны соответственно  и
и  .
.
Давление  будет равно
будет равно  , где
, где  – площадь поршня цилиндр2 1. Это давление будет действовать и на поршень цилиндра 2 (потерями напора в трубопроводе пренебрегаем).
– площадь поршня цилиндр2 1. Это давление будет действовать и на поршень цилиндра 2 (потерями напора в трубопроводе пренебрегаем).
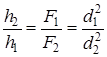
Из рассматриваемой схемы следует, что при полной герметичности цилиндров 1 и 2, а также при практической несжимаемости жидкости перемещения поршней цилиндров  и
и  будут связано соотношением:
будут связано соотношением:
 (1)
(1)
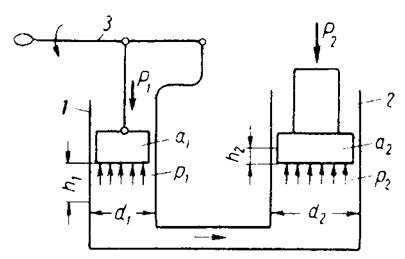 |
Рис. 2. Расчетная схема гидросистемы
На основании уравнения (1), а также принимая во внимание, что и  , имеем:
, имеем:
 ;
;
 . (2)
. (2)
Пренебрегая гидравлическим сопротивлением трубопровода и трением поршней, а также учитывая, что  и
и  , получаем:
, получаем:
 ;
;
 . (3)
. (3)
Считая, что перемещение поршня 1 на величину пути произошло за время  , находим скорость его движения:
, находим скорость его движения:
 , (4)
, (4)
Произведение силы , действующей на поршень 1, на скорость  его движения дает выражение мощности
его движения дает выражение мощности
 . (5)
. (5)
Поскольку произведение скорости поршня на его площадь есть объем, списываемый им в единицу времени или иначе расчетный расход  жидкости, передаваемая мощность будет равна:
жидкости, передаваемая мощность будет равна:
 . (6)
. (6)
Если  выразить в Паскалях, а – в м3/c, то мощность выразиться в ваттах.
выразить в Паскалях, а – в м3/c, то мощность выразиться в ваттах.
Из выражения (6) следует, что расчетная мощность гидропривода растет при неизменном пропорционально повышению давления жидкости. Поскольку при увеличении давления масса и габариты привода и их компонентов (трубопроводы и другие) увеличиваются в меньшей пропорции, так как повышение этих параметров обусловлено условиями прочности, рабочее давление гидроприводов современных ЛА увеличивается по мере внедрения материалов с большой удельной прочностью. В настоящее время величина давления в современных авиационных гидросистемах достигает 21 … 32 МПа, и имеет тенденцию к увеличению.
Мощность единичного гидронасоса и, соответственно, гидропривода не превышает 100 л.с., однако в отдельных случаях может достигать до 1000 л.с. и выше.
Принципиальные схемы гидропривода.
Всякий объемный гидропривод состоит из объемных насоса и гидродви-гателя, а также распределительно-регулирующей и предохранительной аппаратуры, связанных гидравлический магистралью (трубопроводами).
В соответствии с этим во всяком гидроприводе различают три группы элементов: насос (источник гидравлической энергии), гидродвигатель (или исполнительный гидромеханизм), а также распределительная и предохрани-тельная аппаратура.
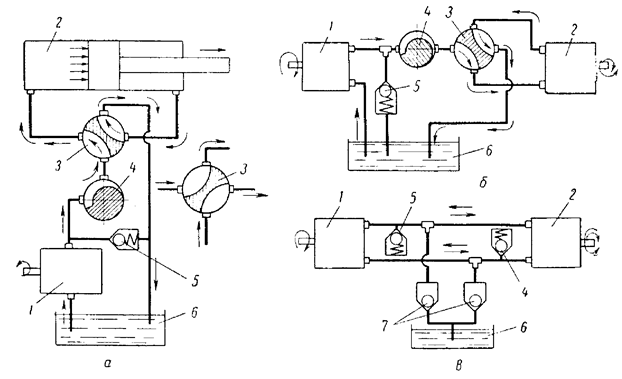
На рис. 3, а и б показаны упрощенные схемы гидропривода с гидродвига-телем возвратно-поступательного (а) и вращательного (б) действия. Соответст-венно их называют гидроцилиндры и гидромоторы.
Привод состоит из насоса 1 с резервуаром (гидробаком) 6 и гидродвигателя 2, соединенными гидропроводами, а также предохранительного клапана 5, ограничивающего повышение давления жидкости в нагнетающей магистрали за насосом. Реверсирование гидродвигателя (изменение направления движения штока силового цилиндра или направления вращения гидромотора) осуществляется распределительным устройством (краном) 3, с помощью которого изменяется направление потока жидкости от насоса к двигателю.
При условии герметичности гидроагрегатов и практической несжимаемости жидкости выходное звено гидродвигателя должно перемещаться (или вращаться) с определенной скоростью, для того, чтобы пропустить через свои рабочие камеры жидкость, подаваемую насосом, т.е. должно выполняться условие
 ,
,
 |
где
 и
и  – теоретические расходы насоса и гидродвигателя (люъемы, описываемые их рабочими элементами) в единицу времени.
– теоретические расходы насоса и гидродвигателя (люъемы, описываемые их рабочими элементами) в единицу времени. Рис. 3. Принципиальные схемы гидросистем:
а – с гидродвигателем возвратно-поступательного действия; б – с гидродвига-телем вращательного действия;
1 – гидронасос; 2 – гидродвигатель; 3 – гидрораспределитель; 4 – дросельний кран; 5 – предохранительный клапан; 6 – бак
В результате, при условии указанных допущений, получим жесткую кинематическую связь между насосом и гидродвигателем.
Регулирование скорости гидродвигателя осуществляется с помощью либо изменения подачи насоса 1, либо с помощью дросселя 4, который регулирует сопротивление на выходе из насоса, в результате чего давление перед насосом повышается и часть жидкости сливается в бак через предохранительный клапан 5.
Нетрудно видеть, что дроссельное регулирование расхода жидкости связано с потерей мощности и нагревом жидкости, поскольку теряемая энергия, соответствующая расходу жидкости через клапан 5 в бак, превращается в тепло.
Сравнительный анализ энергосистем, применяемых на ЛА.
(электромеханические, гидравлические, пневматические)
Сравнительный анализ электромеханических, гидравлических и пневматических систем, применяемых на современных ЛА, позволяет сделать следующие выводы:
1. Электромеханические системы силового привода обладают свойством мгновенно, независимо от расстояния, передавать большие мощности. Они удобны при монтаже, обслуживании и обладают хорошей эксплуатационной живучестью.
Недостатки электромеханических систем, ограничивающие их применение в качестве силовых приводов ЛА:
- низкие массовые, объемные и мощностные характеристики (удельная массовая отдача приводов для различных систем составляет: 2 … 4 кг/кВт - для электромоторов; 10 … 30 кг/кВт - для электрических силовых приводов (мотор, редуктор, пара винт-гайка); 0,1 … 0,4 кг/кВт - для гидромоторов; 0,3 … 0,4 кг/кВт - для гидравлических и пневматических силовых цилиндров);
- большая инерционность и недостаточная жесткость привода;
- сравнительно высокая стоимость агрегатов;
- трудность охлаждения, снижение надежности и качества изоляции при работе на больших высотах.
Области применения электромеханических систем (электромеханичес-кого привода):
- силовой привод малых мощностей (до 3,5 … 4 кВт);
- силовой привод в системах, где инерционность и жесткость не играют решающей роли;
- дистанционное управление другими типами приводов;
- резервные (дублирующие) и аварийные системы.
2. Гидромеханические системы силового привода удовлетворительны по массовым характеристикам, обладают высокой энергоемкостью, их разовая мощность легко увеличивается применением газожидкостных аккумуляторов. Они экономичны, надежны, достаточно жестки и обладают высоким быстродействием.
Недостатки гидросистем:
- недостаточный тепловой диапазон работы из-за нестабильности характеристик рабочей жидкости и уплотнений;
- повышенная пожарная и взрывная опасность (при использовании современных рабочих жидкостей);
- утечки и загрязненность в местах соединений;
- чувствительность исполнительных устройств (особенно следящих систем управления) к загрязнению рабочих тел.
Область применения гидросистем – силовой привод больших мощностей, нагрузок, высокой жесткости и быстродействия.
3. Пневматические (газовые) системы силового привода имеют бесспорные преимущества перед электромеханическими и гидравлическими системами по массе, стабильности характеристик рабочего тела, пожаробезопасности, чистоте соединений, способности развивать большие разовые мощности.
Недостатки пневматических систем:
- малая энергоемкость;
- отрицательное действие упругости воздуха (ударные нагрузки в конце хода, трудности фиксации поршня, запаздывание передачи энергии от источника к потребителю);
- трудности герметизации;
- образование конденсата в рабочих объемах системы.
Область применения пневматических систем:
- силовые и следящие приводы малой мощности;
- силовой привод устройств кратковременного разового действия;
- резервные и аварийные системы;
- комплексные гидрогазовые системы.
Проведенный анализ показывает, что основными энергетическими системами на ЛА будут оставаться гидравлические системы, работающие в комплексе с электроустройствами управления, а также с электрическими или пневматическими (пиротехническими) аварийными системами.
Пневматические системы могут применяться как основные системы на ЛА одноразового действия со сравнительно более низкими требованиями по работоемкости и жесткости.
Общие определения.
Потребитель – гидравлический агрегат, непосредственно соединенный с управляемым объектом и приводящий его в действие (гидроподъемники шасси, гидроусилители, цилиндры элементов механизации крыла и т.д.).
Гидроагрегат – любое устройство, входящее в состав гидросистемы, выполняющее в ней самостоятельные функции, связанные с изменением характеристик рабочей жидкости (чистоты, температуры) и параметров потока (расхода, давления), или реагирующее на эти факторы.
Гидравлическая система – система, состоящая из устройств, обеспечивающих энергией потребители и управляющих режимами их работы как от сигналов летчика, так и от сигналов автоматических систем управления полетом, двигателем, наземным движением и т.д.
Функциональная гидросистема (подсистема) – гидросистема или ее часть, относящаяся к обслуживанию конкретного потребителя. Функциональные системы делятся (по времени их работы на всех этапах полета) на системы непрерывного и системы эпизодического действия, а по принципу их работы – на системы следящего и системы релейного типа.
Классификация типов систем.
Гидросистема открытого типа – гидросистема, которая имеет непосредственный контакт воздуха (газа) с рабочей жидкостью в баке.
Гидросистема закрытого типа – гидросистема, у которой рабочая жидкость в баке изолирована от контакта с воздушной (газовой) средой.
Гидросистема полузакрытого типа – гидросистема, у которой объем над жидкостью в баке заполнен нейтральным газом (например, азотом).
Централизованная гидросистема – гидросистема, обслуживающая группу потребителей.
Автономная гидросистема – гидросистема, обслуживающая один потребитель.
Гидросистемы делятся на основную, резервную и аварийную.
Гидроагрегаты делятся на источники гидроэнергии, гидродвигатели, регулирующую и распределительную аппаратуру, кондиционеры рабочей среды.
Рекомендованная литература
1. ГИДРАВЛИКА, гидравлические машины и гидравлические приводы / Т.М.Башта, С.С.Руднев, Б.Б.Некрасов и др. Под ред. Т.М.Башты. – М.: Машиностроение, 1970. – 504 с.
2. БАШТА Т.М. Гидравлические приводы летательных аппаратов. – М.: Машиностроение, 1967.
3. БАШТА Т.М. Машиностроительная гидравлика. Справочное пособие. – М.: Машиностроение, 1971. – 672 с.
4. БОЧАРОВ В.П., ГЛАЗКОВ М.М. Источники энергии и потребители жидкостно-газовых систем воздушных судов. Учебное пособие. – Киев: КИИГА, 1985.
5. БОЧАРОВ В.П., ГЛАЗКОВ М.М. Гидро- и пневмоаппаратура жидкостно-газовых систем воздушных судов. Учебное пособие. – Киев: КИИГА, 1985.

