 2014-02-24
2014-02-24 2051
2051Кулачковые механизмы служат для преобразования вращательного движения кулачка в поступательное движение механизмов станка с определенной закономерностью. Кулачковые механизмы бывают с плоским (рис. 3.25, б), цилиндрическим (а) или торцовым (в) кулачками.
Плоский (дисковый) кулачок 1 (см. рис. 3.25, б) сообщает движение толкателю 2 в виде рычага в плоскости, перпендикулярной к оси кулачка.
Цилиндрический (барабанный) кулачок 1 (см. рис. 3.25, а) сообщает движение толкателю 2 вдоль оси кулачка. Цилиндрический кулачок перемешает ролик толкателя в обе стороны благодаря наличию фигурного паза. Ее ли одну сторону паза убрать, то получится торцовый кулачок (см. рис. 3.25, в), к которому толкатель должен быть прижат, например, пружиной.

Рисунок 3.25 - Кулачковые механизмы
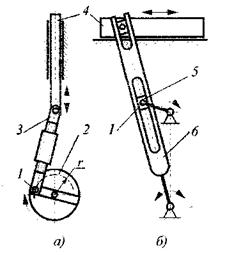
Рисунок 3.26 - Механизмы с кривошипом
В отличие от реечной передачи или передачи винт-гайка, обеспечивающих равномерное движение, кулачок, вращаясь равномерно, способен обеспечить различные законы движения толкателя. Это зависит от рабочего профиля кулачка.
Механизмы с кривошипом преобразуют вращательное движение кривошипа в возвратно-поступательное движение ведомого звена. Кривошипно-шатунный механизм (рис. 3.26, а) содержит кривошип 1, шатун 3 и ползун 4. Кривошип является ведущим звеном и представляет собой палец 1, находящийся на расстоянии r от оси вращения, и связанный с диском 2, имеющим направляющие, или стержнем. Ползун 4 - ведомое звено, совершающее возвратно-поступательное движение. Шатун 3 шарнирно соединён с кривошипом и ползуном. Ход ползуна равен 2r, поэтому в конструкции кривошипа предусматривают направляющие, чтобы регулировать положение пальца. Регулируя длину шатуна 3, изменяют место хода, т.е. сдвигают крайние положения ползуна 4.
Кривошипно-кулисный механизм (рис. 3.26, б) содержит, кроме ведущего кривошипа 1 и ведомого ползуна 4, камень 5, перемещающийся в направляющем пазу кулисы 6. При вращении кривошипа кулиса качается, а ползун движется возвратно-поступательно. Кривошипно-кулисный механизм отличается большой быстроходностью, достаточно плавным реверсированием, но скорость рабочего хода неравномерна, а при уменьшении скорости рабочего хода уменьшается и скорость холостого хода.

