 2014-02-09
2014-02-09 826
826Как известно из теоретической механики, линейную скорость v точек вращающегося тела, отстоящих от оси вращения на расстоянии d /2, определяют по формуле
v = ω ∙ d / 2 = π ∙ n ∙ d / 60, (1.2.1)
где v - в м/с; ω - угловая скорость, рад/с; d - в м; n - частота вращения, мин-1. Эту скорость называют окружной.
Силу, вызывающую вращение тела вокруг его оси и направленную по касательной к траектории его поверхности называют окружной силой Ft. Связь между окружной силой, окружной скоростью v и мощностью Р, передаваемой телом, выражается формулой
Р = F ∙ v, (1.2.2)
где Р - в Вт; F - в Н; v - в м/с, или Р - в кВт; F - в кН; v - в м/с.
Окружная сила F, связана с крутящим моментом, создаваемым телом вращения, зависимостью
F = 2 ∙ Т / d. (1.2.3)
Условимся обозначать для ведущего и ведомого тел вращения (зубчатых колес, шкивов, звездочек и т. п.), соответственно, передаваемые мощности P1 и Р2, передаваемые крутящие моменты Т1 и Т2, угловые скорости ω1 и ω 2 и частоты вращения n1 и n2.
Коэффициент полезного действия передачи
η = P2 / P1, (1.2.4)
Передаваемый телом вращения крутящий момент Т связан с мощностью Р и угловой скоростью ω зависимостью
Т = Р / ω, (1.2.5)
где T - в Н ∙м; Р - в Вт; ω - в рад/с, или Т - в кН ∙м; Р - в кВт; ω - в рад/с.
Передаточным отношением называют отношение угловых скоростей ведущего и ведомого тел вращения передачи:
и = ω1 / ω 2. (1.2.6)
В соответствии с формулой (1.2.5) имеем:
Т1 = Р1 / ω1; (1.2.7)
Т2 = Р2 / ω2; (1.2.8)
Разделив уравнение (1.2.8) на уравнение (1.2.7), с учетом формулы (1.2.4) получим Т2 / Т1 = ω1 ∙ η / ω2, откуда T2 / (T1 ∙ η) = ω1 / ω2 = и. Следовательно, для передачи вращательного движения передаточное отношение
и = ω1 / ω2 = n1 / n2 = T2 / (T1 ∙ η). (1.2.9)
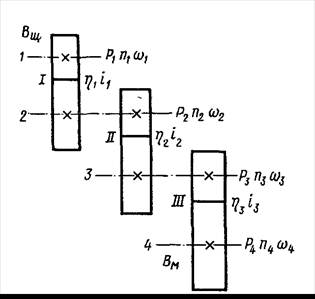 Коэффициент полезного действия η и передаточное отношение и механического привода, состоящего из нескольких последовательно соединенных передач вращательного движения, определяют следующим образом. Допустим, что механический привод состоит из k передач. Тогда число всех валов передач равно к + 1 (рис. 1.2.2). Пусть ведущим валом будет 1-й, а ведомым ‒ (к + 1)-й.
Коэффициент полезного действия η и передаточное отношение и механического привода, состоящего из нескольких последовательно соединенных передач вращательного движения, определяют следующим образом. Допустим, что механический привод состоит из k передач. Тогда число всех валов передач равно к + 1 (рис. 1.2.2). Пусть ведущим валом будет 1-й, а ведомым ‒ (к + 1)-й.
|
η1 = Р2 / Р1, η2 = Р3 / Р2, …, ηk = Рk+1 / Рk. (1.2.10)
Перемножив значения коэффициентов полезного действия всех передач привода, получим
η1 ∙ η2 ∙…∙ ηk = (P2 ∙ P3 ∙...∙ Pk ∙ Pk+1) / (P1 ∙ P2 ∙ P3 ∙...∙ Pk) = Рк+1 / Р1 = η. (1.2.11)
Следовательно,
η = η1 ∙ η2 ∙…∙ ηk, (1.2.12)
т.е. коэффициент полезного действия привода, состоящего из нескольких последовательно расположенных передач, равен произведению коэффициентов полезного действия всех его передач.
Передаточные отношения отдельных передач привода:
и1 = ω1 / ω2, и2 = ω2 / ω3, …, иk = ωk / ωk+1. (1.2.13)
Перемножив передаточные отношения всех передач привода, получим
и1 ∙ и2 ∙…∙ иk = (ω1 ∙ ω2 ∙ ω3 ∙…∙ ωk) / (ω2 ∙ ω3 ∙…∙ ωk ∙ ωk+1) = ω1 / ωk+1 = и. (1.2.14)
Следовательно,
и = и1 ∙ и2 ∙…∙ иk, (1.2.15)
т.е. передаточное отношение привода, состоящего из нескольких последовательно расположенных передач, равно произведению передаточных отношений всех его передач.








