 2015-01-30
2015-01-30 1729
1729 |
Модуль Stack of Traces (рис. 4.39, плакат 30) выполняет суммирование группы трасс в одну суммотрассу. Группа суммирования определяется по признаку суммирования, задаваемому пользователем в качестве параметра.
Рис. 4.39. Рабочее окно модуля S tack of Traces.
Параметры модуля:
Ключ суммирования – слово заголовка трассы, по значению которого трассы объединяются в группы суммирования.
Уровень шума – параметр, влияющий на уровень нормировки амплитуды суммотрассы в начальной части трассы, в области нулевых значений. По умолчанию параметр принимает значение, равное 100%)
Примечание: для корректной работы программы, трассы должны поступать на обработку в отсортированном по ключу суммирования порядке, т.е., если ключ суммирования имеет значение "CDP", то и поступать на обработку трассы должны в порядке возрастания ОГТ.
Модуль Accumulation (рис. 4.40., плакат 31) выполняет накапливание статистически осреднённой сейсмограммы (поканальное суммирование нескольких сейсмограмм).
Рис. 4.40. Рабочее окно модуля Accumulation.
Статистическое осреднение целесообразно использовать для исключения влияния фона случайных помех при анализе сейсмограммы.
Параметр процедуры:
Количество накоплений – количество суммируемых сейсмограмм.
Опция:
Адаптация трасс по ФВК – при выбранной опции, трассы, зарегистрированные на одном канале, будут адаптированы к первой трассе путём сдвига, рассчитанного на основе функции взаимной корреляции (ФВК) трасс.
Примечания: Для корректной работы процедуры важен порядок поступления трасс на обработку, т.е. порядок, в котором они записаны в файле. Важные условия, которые должны выполняться для каждого отдельного файла:
- сейсмограммы должны быть сгруппированы в той последовательности, в которой будет производиться суммирование;
- в пределах одной группы сейсмограммы должны различаться по номеру ПВ, записанному в заголовке трассы.
Суммарная сейсмограмма будет иметь номер ПВ, равный минимальному номеру ПВ исходных сейсмограмм группы.
Контрольные вопросы
1. Каков состав графа стандартной обработки МОГТ-2D минимального объёма?
2. Каково назначение препроцессинга?
3. Каково назначение и особенности процедуры получения временного разреза МОГТ-2D с априорными кинематическими и статическими поправками?
4. Каково назначение и особенности процедуры коррекции кинематических поправок?
5. Каково назначение и особенности процедуры коррекции статических поправок?
6. Почему процедуры коррекции кинематических и статических поправок образуют итерационный цикл, каковы критерии его завершения?
7. Какие процедуры включает в себя препроцессинг?
8. Какие программные модули используются в процедуре ввода/вывода сейсмической информации в комплексе RadExPro Plus?
9. Как организована визуализация сейсморазведочной информации в комплексе RadExPro Plus?
10. Чем отличается хранение обрабатываемой и вспомогательной информации в комплексах RadExPro Plus и SeisWin?
11. Какие основные виды библиотек существуют в комплексе SeisWin?
12. Каково назначение библиотеки LDA в комплексе SeisWin?
13. Каково назначение библиотеки LSE в комплексе SeisWin?
14. Как описывается отбираемая информации я в библиотеке LSE?
15. Каково назначение библиотеки LVI в комплексе SeisWin, как заносится информация в эту библиотеку?
16. Какие параметры задаются при чтении информации в комплексе SeisWin?
17. Как организован вывод сейсмической информации в комплексе SeisWin?
18. Как организована визуализация сейсмической информации в комплексе SeisWin?
19. Какие виды коррекции амплитуд реализованы в комплексе RadExPro Plus, какие из них вами использовались?
20. Какие программные модули реализуют коррекцию амплитуд в комплексе SeisWin, какие из них использовались вами?
21. В чём суть алгоритма автоматической регулировки амплитуд?
22. Какой модуль реализует полосовую частотную фильтрацию в комплексе RadExPro Plus?
23. Чем отличаются реализации полосовой частотной фильтрации в комплексах RadExPro Plus и SeisWin?
24. На чём основан и в чём суть алгоритма предсказывающей деконволюции?
25. В каком программном модуле реализована предсказывающая деконволюция в комплексе RadExPro Plus?
26. В каком программном модуле реализована предсказывающая деконволюция в комплексе SeisWin?
27. В чём суть алгоритма корректирующей частотной фильтрации и как она реализуется в комплексах RadExPro Plus и SeisWin?
28. В чём суть алгоритма расчета статических поправок «от рельефа» и почему он дает приближенные результаты?
29. Какие параметры задаются при расчете статических поправок «от рельефа» в комплексе RadExPro Plus?
30. Как осуществляется ввод статических поправок в комплексе RadExPro Plus?
31. Как реализован расчет статических поправок «от рельефа» в комплексе SeisWin?
32. Каким программным модулем реализуется автоматическая коррекция статических поправок в комплексе SeisWin?
33. Как используются корректирующие поправки, определённые при автоматической коррекции статических поправок в комплексе SeisWin?
34. Что понимается под кинематической поправкой и какие данные необходимы для её расчета?
35. Как реализован рачёт кинематических поправок в комплексе RadExPro Plus?
36. Какой алгоритм использован для коррекции кинематических поправок в комплексе RadExPro Plus?
37. В какой форме подаётся исходный сейсмический материал на вход программы коррекции кинематических поправок в комплексе RadExPro Plus?
38. Какова структура рабочего окна программы коррекции кинематических поправок в комплексе RadExPro Plus?
39. Какие параметры задаются при коррекции кинематических поправок в комплексе RadExPro Plus?
40. Как реализован расчёт кинематических поправок в комплексе SeisWin, какие параметры должны быть заданы?
41. Какими программными модулями реализована процедура коррекции кинематических поправок в комплексе SeisWin?
42. Как формируется двумерная скоростная модель в комплексе SeisWin?
43. Каким программным модулем реализуется суммирование ансамбля сейсмических трасс в комплексе RadExPro Plus, как задаются параметры ансамбля?
44. Каким программным модулем реализуется суммирование ансамбля сейсмических трасс в комплексе SeisWin, как задаются параметры ансамбля?
45. В чём отличие программных модулей Stack of Traces и Accumulation в комплексе SeisWin?
Раздел 5 Параметрическая обработка данных
сейсморазведки МОГТ-2D
Тема 5.1 Преобразование эквидистантно-кодированных сейморазведочных
данных МОГТ-2D в параметрическую
форму.
Неэквидистантное кодирования имеет целью сокращение объёмов хранимой и обрабатываемой информации. Простейшей его формой является экстремальное кодирование, при котором знакопеременный сигнал оцифровывается только в точках экстремумов. Степень сокращения объёмов можно представить себе из нижеследующего примера.
Пусть кодируется квазисинусоидальный сигнал, длительностью
1 с., имеющий видимый период» 0.032 с. и максимальную частоту спектра» 125 Гц. В соответствии с расширенной теоремой Котельникова для его неискаженной передачи требуется использовать шаг дискретизации dt = 0.002 с. Таким образом, сигнал будет закодирован 500 отсчетами. При экстремальном кодировании период следования экстремумов составляет 0.016 с. и для кодирования рассматриваемого сигнала потребуется 1/0.016 = 62.5» 63 отсчета, т.е. объём хранимой информации уменьшается в» 8 раз[1].
Объём хранимой информации может быть уменьшен ещё более, если кодировать только сигналы, создаваемые регулярными волнами. Для этого необходимо дать формальное описание сигнала регулярной волны и разработать на его основе алгоритм выделения таких волн.
Эта задача была успешно решена в 80-тые годы прошлого столетия коллективом авторов под руководством Ю.Н. Воскресенского, работавшим при кафедре полевой геофизики МИНХ и ГП ми. И.М. Губкина (г. Москва). Критерием регулярности волны является прослеживаемость сигналов волны на трассах встречных сейсмограмм, причём время её во взаимных точках на обеих сейсмограммах должно быть одинаковым, а наклон осей синфазности – противоположным. Проблема получения встречных сейсмограмм решается при использовании материалов методики многократных перекрытий, где компоновки сейсмотрасс по ОПВ и ОПП образуют встречные сейсмограммы. Для выделения и определения параметров отраженных волн используется суммирование по методу регулируемого направленного приёма (МРНП)[2].
В МРНП реализуется анализ сейсмического волнового поля на основе суммирования сейсмотрасс, распределённых на некоторой базе анализа, по вееру линейных направлений. Результатом суммирования по одному из направлений является суммотрасса, результатом суммирования по вееру направлений является комбинация суммотрасс (суммолента РНП), где каждой суммотрассе соответствует значение (параметр) направления суммирования. Если на исходных сейсмотрассах присутствуют сигналы регулярной волны, распределённые по линейному годографу с наклоном ti, то при суммировании по соответствующему направлению эти сигналы, будут складываться синфазно и амплитуда суммарного сигнала будет максимальной. При суммировании по другим направлениям синфазного сложения не происходит, следовательно, амплитуда суммарного сигнала может служить, с одной стороны, – целевой функцией при определении наклона оси синфазности ti (сдвига сигналов или V*), с другой стороны, она является одной из динамических характеристик волны (характеризует интенсивность сейсмических колебаний). Таким образом, анализ суммоленты РНП позволяет определить следующие параметры регулярных (на базе анализа) волн:
- наклон оси синфазности ti (или кажущуюся скоростьV*);
- времена регистрации экстремальных фаз суммарных сигналов;
- фазовые амплитуды или энергии суммарных сигналов;
- видимые периоды колебаний.
Для выделения регулярных волн и исключения случайных помех обработке подвергаются две взаимные базы анализа, формируемые на базе встречных сейсмограмм ОПВ и ОПП. Принципы формирования взаимных баз анализа (Рис. 5.1.):
- используются базы с нечетным числом каналов;
- взаимная точка баз относится к центральной трассе (соответственно, все параметры волнового поля оказываются привязанными к координатам этой точки наблюдений).
Рис. 5.1. Фланговая 24-х канальная система наблюдения на
обобщённой плоскости. Формирование встречных баз анализа ОПВ, ОПП.
При отборе регулярных волн сопоставляются, определённые по взаимным суммолентам) параметры времени регистрации (времена во взаимных точках на встречных суммолентах должны быть одинаковыми) и кажущиеся скорости (при горизонтальном залегании отражающих границ V* должны быть равны по модулю и противоположны по знаку, при наклонном залегании величины V* находятся в более сложном соотношении, но противоположность знака сохраняется)[3].
Волны, параметры которых не соответствуют вышеуказанным критериям считаются случайными и исключаются из дальнейшего рассмотрения. Для повышения статистической устойчивости определяемых параметров для каждой точки наблюдений формируется и анализируется не одна, а несколько встречных сейсмограмм (для разных диапазонов удалений «источник-приёмник»), имеющих общую отражающую площадку (Рис. 5.2).
После селекции волн выполняется объединение параметров, определённых по всей совокупности встречных сейсмограммам для каждой точки наблюдения (каждой взаимной точки) исходя из следующего:
- времена регистрации приводятся ко времени t0 во взаимных точках и осредняются по всей совокупности определений;
Рис. 5.2. Система встречных баз анализа, отнесённая к ПГН-14.
- параметры наклона оси синфазности(ti) осредняются по всем сейсмограммам ОПВ и ОПП, осреднённые значения пересчитываются в V*ОПВ и V*ОПП;
- по найденным осреднённым значениям V*ОПВ и V*ОПП рассчитывается значение Vэф (используется способ взаимных точек, рассмотрен в курсе «Сейсморазведка»);
- по всей совокупности определений для каждой взаимной точки осредняются амплитуды в одноимённых экстремальных фазах (в дальнейшем сохраняются параметр амплитуды в положительном экстремуме и отношение амплитуды отрицательного экстремума к амплитуде предшествующего положительного);
- по всей совокупности определений для каждой взаимной точки для каждой положительной фазы сигнала осредняются значения видимой частоты.
В конечном итоге в каждой i-той точке наблюдения каждый j-тый сигнал регулярной волны в каждой k-той положительной фазе характеризуется некоторым набором 10-ти параметров (вектором параметров), главными из которых являются:
- t0 (i,j,k),
- a+ (i,j,k),
- a- / a+ (i,j,k),
- ti (i,j,k)
- f* (i,j,k),
- Vэф (i,j,k)
Помимо этого вектор включает в себя ещё 4 параметра, которые являются служебными и характеризуют статистику определения основных.
Для каждой точки наблюдения формируется псевдотрасса, привязанная к координатам центра баз анализа и содержащая последовательность векторов параметров в порядке возрастания параметра t0 . Оценить степень сжатия объёмов хранимой информации теоретически невозможно – всё зависит от конкретных сейсмогеологических условий. Практика работы свидетельствует, что объём хранимой информации сжимается» 8 ¸ 10 раз.
При обработке параметризованной таким способом информации легко осуществляется селекция волн по любому из основных параметров и их сочетанию – задаются границы изменения параметров пропускаемой (или удаляемой) информации. При этом подавляемые сигналы не ослабляются (как это происходит при применении любого вида фильтрации), а удаляются полностью.
На основе перечисленных выше параметров достаточно просто и с достаточной с практической точки зрения точностью восстанавливается эквидистантно кодированная запись. При этом фон случайных помех отсутствует полностью и могут быть полностью исключены волны, отождествляемые с помехами. Легко видеть, что рассматриваемые основные параметры несут геологически значимую информацию.
Рассмотренный выше алгоритм параметризации сейсморазведочной информации был реализован как подкомплекс комплекса СЦС-3 и носил не совсем точное название «Цифровая модификация РНП» (ЦМ РНП). Позже он был переработан для платформы РС под управлением ОС Windows и в автономном виде был известен под названием SWAP (аббревиатура от «Seismic Wave Parameters»).
В рамках обоих комплексов были реализованы следующие виды обработки параметрической информации:
- построение динамических глубинных и временных разрезов с учётом сейсмического сноса в раках среднескоростной модели среды;
- построение параметрических разрезов;
- построение двумерной скоростной модели на уровне интервальных скоростей (с учётом преломления лучей на промежуточных границах).
Тема 5.2 Построение динамических глубинных и
временных разрезов.
Определение параметров времени регистрации условно-положительных фаз (t0), наклона оси синфазности (ti), эффективной скорости (Vэф) и амплитуды сигнала в экстремуме условно-положительной фазы (a+) всех регулярных сигналов на всём профиле позволяют построить динамический глубинный разрез этого профиля.
Формирование разреза происходит на поле накопления в системе координат (x, z). Его можно представить как совокупность колонок, каждая их которых ассоциируется с пунктом геофизических наблюдений (ПГН). Ячейки в колонках ассоциируются с отметками глубин[4].
Пусть в некотором i-том ПГН (с координатой xi) фиксируется j-тая регулярная волна, сигнал которой имеет n условно-положительных экстремумов (т.е. номер экстремума k изменяется в интервале 1 ¸ n). Пусть на базе D с центром в точке xi выполнен РНП-анализ встречных сейсмограмм и сформировано n векторов параметров, включающих
t0 (i,j,k), ti (i,j,k), a+ (i,j,k), Vэф (i,j,k). Эти параметры позволяют восстанавливать изображение среды (рис. 5.3.).
Рис.5.3. Лучевая схема среднескоростного миграционного преобразования (комплексы программ параметрической обработки сейсморазведочной информации ЦМ РНП и SWAP). Здесь:
Р – плоскость (линия) наблюдения;
R – отражающая граница с углом наклона j;
АС = D – база анализа РНП;
В – центр базы с координатой xi
AE, BF, CG – нормали к границе R;
BF – эхо-глубина в центре базы D;
FH – Z-глубина в точке отражения;
AD – прямая, параллельная границе R.
BH – сейсмический снос (Dх).
Рассмотрим параметры первого экстремума, т.е. положим K = 1. В соответствии с рис.5.3. t0 (i,j,1) = 2BF / Vсред, ti (i,j,1) = CD / Vсред.
Для определения координат точки отражения ХF и ZF рассмотрим треугольники ACD и BFH. Нетрудно видеть, что они подобны а углы CAD и BFH равны углу наклона отражающей границы (обозначим их как угол j). Синус этого угла можно определить их треугольника ACD как sin j = CD / D, где величина CD может быть определена из параметра ti (i,j,1): CD = ti (i,j,1)· Vсред, т.е.:
sin j =CD / D = [ti (i,j,k)· Vсред] / D
Тогда координаты точки отражения можно определить как:
ХF = xi – Dх = = xi - BF / sin j = xi - [t0 (i,j,k)· Vсред] / [2sin j],
ZF = 
По найденным координатам в поле накопления отыскивается ячейка, куда заносится значение амплитуды a+ (i,j,1). Данная точка является средней в отражающей площадке, рассматриваемой при определении параметров отраженной волны, эти параметры позволяют восстановить всю площадку. Для этого вычисляется приращение Z-глубины на базе всей отражающей площадки D и пересчитывается в приращение глубин на интервале между соседними ПГН:
dz = DZ / (n-1) = [ti (i,j,1)· Vсред·cos j] / (n – 1)
Значение dz позволяет выбрать ячейки на поле накопления на трассах всех трассах базы анализа: Z(m) = ZF + [m – (N + 1)/2].
здесь N – число трасс на базе анализа D,
m – номер трассы на базе анализа,
ZF – Z-глубина на центральной трассе базы.
В выбранные ячейки также заносятся значения a+ (i,j,k) и в поле накопления таким способом формируется образ «отражающей площадки», описываемый вектором параметров первой фазы сигнала. Аналогично строятся «отражающие площадки» по векторам второй и последующих условно-положительных фаз.
Вышеописанные построения проводятся во всех последующих ПГН. Поскольку величины баз анализа существенно (в 5 – 7 раз) превышают расстояния между ПГН, то «площадки» одноименных фаз в поле накопления частично перекрываются. В этом случае в перекрывающиеся ячейки заносится суммарное значение амплитуд. Таким образом, значения фазовых амплитуд в поле накопления являются не только динамической характеристикой сигнала, но и характеризуют устойчивость фаз сигналов отраженной волны.
После того, как в поле накопления построены «отражающие площадки» всех фаз всех регулярных сигналов каждая из колонок поля представляет собой импульсную сейсмотрассу мигрированного глубинного разреза. Путём свёртки с эмпирически подобранным импульсом импульсные сейсмотрассы преобразуются в динамические трассы глубинного разреза. Получить мигрированный динамический временной разрез можно поделив глубины регистрации фаз на значения средней скорости, соответствующей этим глубинам и положению ПГН на профиле.
Сопоставление мигрированных динамических временных разрезов, полученных в ходе параметрической обработки, с аналогичными разрезами, полученными при обработке по способу ОСТ, показало следующее.
- В областях удовлетворительного прослеживания отражающих горизонтов сопоставляемые разрезы практически не различаются ни по кинематическим, ни по динамическим характеристикам сейсмической записи.
- В зонах ухудшения корреляции отраженных волн на разрезах ОСТ имеет место «затягивание» отражений, что объясняется интегральным характером способа ОСТ.
- В силу дифференциального характера параметрической обработки (разделение волнового поля на компоненты, описываемые линейными годографами при РНП-анализе) на динамических временных разрезах SWAP (и ЦМ РНП) резче проявляются зоны ухудшения корреляции, что облегчает выявление зон нарушений.
Из сказанного следует, что разрезы параметрической обработки служат хорошим дополнением в разрезам ОСТ.
Тема 5.3 Построение параметрических
временных разрезов.
Параметрическое описание всех условно-положительных фаз всех зарегистрированных сигналов регулярных волн позволяет сформировать двумерное распределение любого из параметров на плоскости временного разреза. Такие параметрические разрезы несут геологически значимую информацию и могут быть использованы при интерпретации сейсмических материалов.
При формировании параметрических временных разрезов каждую псевдотрассу преобразуют в численный «график» распределения параметра, аргументом которого является время. Шаг дискретизации по времени задаётся обработчиком и чаще всего выбирается равным шагу дискретизации исходной информации. Значения параметра в промежутках между положительными фазами определяются путём линейной интерполяции. Совокупность «графиков», сформированных по всем псевдортассам, образует параметрический временной разрез (ПВР).
ПВР является двумерной функцией, аргументами которой являются х-координата трассы на профиле и время t0. Для визуализации его используется цветокодированное представление значения параметра.
В курсе «Сейсморазведка» рассматривался способ обработки сейсморазведочной информации, результативными материалами которого являлись временные разрезы мгновенных амплитуд, мгновенных фаз и мгновенных частот. ПВР амплитуд является точным аналогом разреза мгновенных амплитуд. ПВР частот отображает распределение видимой частоты на поле временного разреза, которая, вообще говоря, аналогом мгновенной частоты не является. Однако последний параметр очень неустойчив и в практике сейсморазведки используются, как правило, сглаженные (осреднённые) значения мгновенной частоты, которые по своей сути близки к видимым частотам.
Разрез, эквивалентный разрезу мгновенных фаз, легко получить построив неинтерполированные «графики» амплитуд a+ и нивелировав (уровняв) их значения во всех векторах параметров. Положительные фазы регулярных сигналов будут отображаться импульсам («пичками») с постоянными амплитудами. Разрезы такого вида накладываются на ПВР других параметров, что позволяет привязать области с различными значениями параметров к осям синфазности временного разреза. При этом для выделения только устойчивых (амплитудно выраженных) осей синфазности перед построением «графиков» выполняют дискриминационный отбор, отсеивающий вектора с низкими значениями амплитуд.
Из сказанного выше видно, что рассматриваемое параметрическое представление сейсморазведочной информации позволяет получить ПВР, эквивалентные разрезам способа мгновенных параметров. Помимо этого, при параметрической обработке в обязательном порядке получают ПВР Vэф, и достаточно часто – ПВР наклонов осей синфазности ti, (последний отражает степень дислоцированности геологического разреза). Аналогичные разрезы в способе мгновенных параметров не могут быть получены в принципе.
Некоторые из служебных параметров векторов также могут бать визуализированы в виде ПВР и характеризовать статистическую устойчивость параметрической информации.
Тема 5.4 Построение двумерной скоростной
модели.
Поле скоростей Vэф, рассчитываемых по одному из самых эффективных алгоритмов, позволяет в рамках параметрической обработки сейсморазведочной информации сформировать комплекс программ построения двумерной скоростной модели на уровне интервальных скоростей (Vинт)
При построении двумерной скоростной модели необходимо было решить следующие задачи:
- отбор статистически устойчивой информации;
- объединение отобранной информации в совокупности, отвечающие фрагментам осей синфазности отраженных волн («отражающие площадки» в терминологии авторов параметрической обработки);
- объединение «отражающих площадок» в совокупности, составляющие коррелируемые фазы отражений ((«границы » в терминологии авторов параметрической обработки);
- расчёт траекторий сейсмических лучей и поэтажное (сверху вниз) построение сейсмических границ (с учётом преломления лучей на всех выделенных промежуточных границах);
- определение лучевых скоростей на всех интервалах между выделенными сейсмическими границами, определение интервальных скоростей путём статистического осреднения лучевых;
- визуализация скоростной модели.
Отбор статистически устойчивой информации и объединение отобранной информации в «отражающие площадки» реализованы в программе SkeGra («скелет» + «граница»). Алгоритм отбора основан на построении гистограмм распределения того или иного параметра, отсечении незначимой части и исключении из дальнейшей обработки векторов, попавших в область отсечения. Стратегия отбора:
- вначале выполняется отбор по параметру t0;
- прошедшие отбор по t0 вектора параметров подвергаются отбору по параметру ti;
- на третьей стадии выполняется отбор по параметру Vэф.
Во второй части программы («Граница») массив отобранных векторов параметров сортируется по принципу принадлежности к устойчивым совокупностям векторов («отражающие площадки»). Каждая совокупности получает уникальный номер, который запоминается как одна из компонент вектора.
В заключительной части программы выполняется визуализация «отражающих площадок» на плоскости временного разреза. Каждая из «площадок» выводится условными значками[5] (·, +, *, #, ´ и т.п.) на трассе, соответствующей х-координате вектора и времени t0 данного вектора данной «площадки». Рядом с каждой «площадкой» выводится её номер. На плоскости разреза «площадки» выстраиваются вдоль осей синфазности. Внешний вид временного разреза программы SkeGra отличается от динамического временного разреза лишь тем, что оси синфазности сигналов отраженных волн представлены в виде совокупностей «площадок», обозначенных условными значкам и сопровождающихся их номерами.
Для выполнения собственно скоростного анализа интерпретатор должен прокоррелировать оси синфазности, соотносимые с положением отражающих границ на временном разрезе, – определить последовательности номеров «площадок», отождествляемых с соответствующими осями («границами », которые также как и «площадки» получают собственные уникальные номера). При корреляции площадки не обязательно образуют непрерывную линию. Выделяется два вида разрывов:
- разрывы, связанные с нарушением сплошности отражающих границ (с дизъюнктивными нарушениями);
- разрывы, связанные с ухудшением отражающих свойств непрерывных границ раздела.
В первом случае совокупности «площадок» по разные стороны от зоны потери корреляции соотносят с разными «границами» (с разными номерами).
Во втором случае решение проблемы ищется в восстановлении недостающей части «границы» путём сплайн-интерполяции. Такое решение продиктовано соображениями, изложенными ниже.
Как было сказано выше, интервальные скорости в SWAP вычисляются на основании лучевых скоростей – скорости пробега волны вдоль отрезка луча между точкам отражения (на подошве интервала) и преломления (на кровле интервала). Из этого следует необходимость восстановления луча отраженной волны от точки регистрации до точки отражения с учётом его преломления на всех промежуточных границах (трассировка луча). Для выполнения трассировки необходимо:
- по параметрам вектора определить положение (уравнение) луча в точке его выхода на плоскость наблюдения (определить начальное положение луча);
- зная положение луча определить точку его встречи с отражающей границей (путём совместного решения уравнения луча и уравнения границы).
Принцип получения уравнения начального луча можно уяснить, рассмотрев фрагмент рисунка 5.3, представленный на рис. 5.4.
Рис.5.4. Схема выхода сейсмических лучей
к базе анализа D.
Как было сказано выше, вектор параметров, определяемый на базе D относится к средней точке базы (В). Нетрудно видеть, что угол между сейсмическим лучем в точке В и вертикалью равен углу между фронтом волны (AD) и горизонтальной плоскостью приведения Р (угол CAD). Синус этого угла равен отношению CD / АС = CD / D. Значение CD можно определить как приращение времени регистрации волны на базе D (ti) умноженное на значение скорости распространения волны в толще, прилегающей к плоскости V (этот параметр известен с достаточной детальностью из материалов изучения ВЧР). Угол CAD легко пересчитывается в значение углового коэффициента начального луча, а его уравнение может быть записано как уравнение прямой проходящей через заданную точку (В) с вычисленным угловым коэффициентом.
Построение двумерной скоростной модели выполняется поэтажно.
Первым шагом является определение лучевых скоростей в 1-ом (самом верхнем) слое заданной модели волнового поля. Предполагается, что лучевая скорость в каждой точке регистрации отраженной волны равна параметру Vэф в соответствующем векторе параметров, а время пробега по лучу – t0/2. По параметру ti определяется направление луча и положение точки отражения – на расстоянии (t0/2)·Vэф, вычисляются координаты этой точки. Обрабатывая все вектора во всех точках регистрации, рассчитывают координаты всех точек отражения. Определённые таким образом координаты точек отражающей границы несут в себе случайные погрешности. Для их устранения используется, так называемая, бикубическая сплайн-аппроксимация,позволяющая получить математическое уравнение границы. Данный способ не накладывает существенных ограничений на исходные данные и позволяет получить уравнения кривых, дифференцируемых не менее чем до второго порядка (т.е. в точке встречи луча с границей всегда может быть определено положение касательной и, соответственно, углы падения и преломления сейсмического луча). Помимо этого, сплайн-аппроксимация позволяет получить приближенное положение отражающей границы в областях потери корреляции.
По параметру Vэф также выполняется сплайн-аппроксимация, которая позволяет получить уравнение зависимости Vинт в первом слое (Vинт 1) от х-координат точки регистрации.
При построении второй границы (R2 на рис. 5.5) в каждой из точек регистрации (на рис.5.5. – точка В) по значениям параметра ti и Vинт 1 определяется уравнение начального луча, как это описановыше. Решая совместно это уравнение и уравнение первой отражающей границы R1, находят координаты точки преломления луча (D) и путь пробега волны по рассматриваемому лучу в первом слое (обозначим его как s1, а путь пробега во втором слое, соответственно, – как s2).
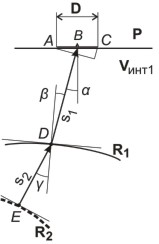
Рис. 5.5. К определению положения
точки отражения на границе R2.
Времена пробега в первом и во втором слое –Dt1 = s1 /Vинт 1 и
Dt2 = (t0/2) - Dt1.
Путь пробега волны во втором слое можно найти из соотношения:
Vэф =  =
=  , откуда следует, что s2 =
, откуда следует, что s2 =  ,
,
а лучевая скорость во втором слое: V2 = s2 /Dt2
Зная скорости распространения волн в первом и втором слое и направление луча в первом слое можно определить направление луча, преломленного на первой границе. Для этого определяется угол наклона первой границы в точке падения луча как угловой коэффициент касательной плоскости (первая производная уравнения границы в точке падения луча) и, путём решения элементарной тригонометрической задачи, вычисляется синус угла падения (sin β). В соответствии с законом Снеллиуса:
sin γ = sin β·(V2 / Vинт1.)
Зная угол наклона границы, угол преломления и путь пробега волны во втором слое (s2) можно определить направление (угловой коэффициент) преломленного луча и координаты точки отражения от второй границы. Уравнение второй границы и зависимость Vинт 2 от
х-координат точек преломления находятся так же, как и для первой границы.
Рассмотренный алгоритм можно распространить на произвольное количество слоёв. Он реализован в виде двух последовательно выполняемых программ комплекса SWAP (S-hor и R-hor). Результатом их выполнения является двумерная скоростная модель, представляющая собой мигрированный глубинный разрез (значения z-глубин в каждой точке регистрации по каждому из выделенных горизонтов) и значений интервальных скоростей во всех выделенных слоях в каждой точке регистрации.
Скоростная модель может быть визуализирована (с помощью программы V-hor) в виде мигрированного глубинного разреза, где значения интервальных скоростей подписаны над отражающими границами (подошвенными границами интервалов) в дискретных точках (с заданным шагом между ними). Скоростные зависимости могут быть визуализированы в виде графиков Vинт (х) по каждому из выделенных интервалов. Кроме того, глубинный масштаб может быть пересчитан во временной (время tz), значения Vинт (z) или Vинт (tz) могут быть пересчитаны в Vсред (z) или в Vсред (tz) и визуализированы в виде соответствующих разрезов или графиков.
Комплекс программ скоростного анализа, реализованный SWAP, был и остаётся одним из самых эффективных способов решения обратной задачи сейсморазведки в лучевом приближении на уровне модели Vинт (z). Если поэтажное построение модели в настоящее время является общепринятым, то методы получения и задания исходных данных для скоростного анализ не имеют аналогов.
Прежде всего, в подавляющем большинстве комплексов обработки скоростной параметр определяется с помощью регулируемого направленного анализа (РНА) скоростей VОГТ (t0). Для построения модели Vинт (z) требуется пересчёт VОГТ в эффективные и предельные эффективные скорости. Параметр Vэф, определяемый в ЦМ РНП и SWAP не зависит от углов наклона границ и мало зависит от их кривизны[6]. Более того, для сложных условий солянокупольной тектоники были выполнены сопоставления получаемых в ЦМ РНП и SWAP моделей
Vинт (z) при использовании эффективных и предельных эффективных скоростей. В результате было установлено, что различия моделей находятся на уровне погрешностей скоростного анализа, что позволило в дальнейшем отказаться от пересчёта в эффективных скоростей и предельные эффективные.
Использование в комплексах программ эквидистантной обработки сейсморазведочных данных РНА скоростей VОГТ предполагает выполнение предварительной корреляции отражающих горизонтов и интерактивного (субъективного) выбора оптимальных значений VОГТ. Изменение варианта корреляции требует повторения трудоёмкого скоростного анализа, что делается лишь в исключительных случаях.
В комплексах программ параметрической обработки подбор оптимальных вариантов корреляции границ по материалам программы SkeGra выполняется весьма просто и является обязательной технологической процедурой при поэтажном построении скоростной модели. Весьма чувствительным критерием оптимальности выбранного варианта корреляции является величины и характер изменения Vинт (z) по латерали.
Контрольные вопросы
1. В чём смысл применения неэквидистантного кодирования сейсморазведочной информации?
2. Каковы критерии выделения регулярных волн, используемые в параметрической обработке сейсморазведочной информации?
3. В чём суть метода РНП?
4. Какие параметры сигнала могут быть определены по суммоленте МРНП?
5. Какие сейсмические материалы используются в параметрической обработке сейсморазведочной информации и как формируются встречные базы анализа МРНП?
6. Как достигается повышение статистической устойчивости определения параметров на этапе формирования баз анализа?
7. Каким образом изменяются параметрысигналов регулярных волн при объединении данных встречных баз?
8. Какой алгоритм определения скорости Vэф, использован в параметрической обработке сейсморазведочной информации и какие параметры используются в нём в качестве исходных данных?
9. Перечислите основные компоненты вектора параметров и поясните их информационное содержание.
10. В каком виде сохраняется параметрическая информация в комплексах программ параметрической обработки?
11. Какие программные реализации параметрической обработке сейсморазведочной информации вам известны, в чём их различия?
12. Какие процедуры обработки параметрической информации были реализованы в комплексах ЦМ РНП и SWAP?
13. Какой алгоритм лежит в основе формирования динамических разрезов в параметрической обработке сейсморазведочных данных?
14. В какой системе координат и на какой основе производится формирование динамического разреза в параметрической обработке?
15. Каким образом обеспечивается непрерывность прослеживания фаз сигнала на динамическом разрезе?
16. Что отображает амплитуда сигналов на динамическом разрезе в параметрической обработке?
17. Как восстанавливается форма сигналов на динамических разрезех в параметрической обработке?
18. Как соотносятся временные разрезы параметрической обработки и МОГТ-2D?
19. Какие параметрические разрезы могут быть построены в ЦМ РНП и SWAP?
20. Как соотносятся параметрические разрезы, получаемые по способу мгновенных параметров и ЦМ РНП (SWAP)?
21. На чём основана возможность построения комплекса скоростного анализа в параметрической обработке сейсморазведочной информации?
22. Какие задачи решаются при построении двумерной скоростной модели при параметрической обработке сейсморазведочной информации?
23. На чём основан алгоритм отбора статистически устойчивой параметрической информации при построении двумерной скоростной модели?
24. В каком порядке производится отбор статистически устойчивой параметрической информации при при построении двумерной скоростной модели?
25. Каким образом формируются «отражающие площадки» и в каком виде они визуализируются?
26. Каким образом задаётся исходная информация для трассировки лучей отраженных волн?
27. Какие ограничения накладываются при объединении «отражающих площадок» в «границы»?
28. Какой алгоритм используется для статистического осреднения параметров «границ» и их восстановления в зонах потери корреляции?
29. Как определяются параметры сейсмического луча в точке его выхода на плоскость наблюдения?
30. Какой принцип положен в основу построения двумерной скоростной модели?
31. Каким способом определяется уравнение сейсмической границы?
32. Как определяется параметр Vлуч?
33. Каким образом определяются параметры сейсмического луча, преломленного на промежуточной границе?
34. Каким образом параметры Vэф (в 1-ом слое) и Vлуч пересчитываются в параметр Vинт?
35. Как визуализируется двумерная скоростная модель?
36. В чём принципиальное отличие комплексов скоростного анализа в МОГТ-2D и ЦМ РНП (SWAP)?








