 2015-02-04
2015-02-04 557
557основные формулы
КИНЕМАТИКА
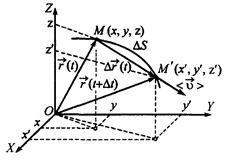
• Положение материальной точки в пространстве задается радиусом-вектором  :
:

где  — единичные векторы направлений (орты);
— единичные векторы направлений (орты);  — координаты точки.
— координаты точки.
 Кинематические уравнения движения в координатной форме:
Кинематические уравнения движения в координатной форме:


где t — время.
• Средняя скорость:
 .
.
где  — перемещение материальной точки за интервал времени
— перемещение материальной точки за интервал времени  .
.
• Средняя путевая скорость:

где  — путь, пройденный точкой за интервал времени .
— путь, пройденный точкой за интервал времени .
• Мгновенная скорость:

где  — проекции скорости
— проекции скорости  на оси координат.
на оси координат.
Модуль скорости:
 .
.
• Ускорение:
 ,
,
где:  - проекции ускорения
- проекции ускорения  на оси координат.
на оси координат.
Модуль ускорения:  .
.
При криволинейном движении ускорение можно представить как сумму нормальной  и тангенциальной
и тангенциальной  составляющих:
составляющих:
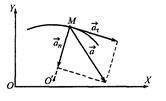
 .
.
Модули этих ускорений:
 ;
;  ;
;  ,
,
где R — радиус кривизны в данной точке траектории.
• Кинематическое уравнение равномерного движения материальной точки вдоль оси х:
 ,
,
где  — начальная координата; t — время. При равномерном движении
— начальная координата; t — время. При равномерном движении
 и
и  .
.
• Кинематическое уравнение равнопеременного движения ( ) вдоль оси x:
) вдоль оси x:
 ,
,
где v 0 ‑ начальная скорость; t ‑ время.
Скорость точки при равнопеременном движении:
 .
.
• Положение твердого тела (при заданной оси вращения) определяется углом поворота (или угловым перемещением)  .
.
Кинематическое уравнение вращательного движения:
 .
.
• Средняя угловая скорость:
 ,
,
где  — изменение угла поворота за интервал времени . Мгновенная угловая скорость:
— изменение угла поворота за интервал времени . Мгновенная угловая скорость:
 .
.
• Угловое ускорение:
 .
.
• Кинематическое уравнение равномерного вращения:
 ,
,
где  - начальное угловое перемещение; t - время. При равномерном вращении
- начальное угловое перемещение; t - время. При равномерном вращении  и
и  .
.
Угловая скорость и угловое ускорение являются аксиальными векторами, их направления совпадают с осью вращения.
• Частота вращения:
 =N/t, или =1/T,
=N/t, или =1/T,
где N — число оборотов, совершаемых телом за время t; Т — период вращения (время одного полного оборота).
• Кинематическое уравнение равнопеременного вращения ( .)
.)
 ,
,
где  - начальная угловая скорость; t - время.
- начальная угловая скорость; t - время.
Угловая скорость тела при равнопеременном вращении
 .
.
• Связь между линейными и угловыми величинами, характеризующими вращение материальной точки, выражается следующими формулами:
путь, пройденный точкой по дуге окружности радиусом R,
 ( - угол поворота тела);
( - угол поворота тела);
скорость точки линейная
 ;
;  ;
;
ускорение точки:
тангенциальное
 ;
;  ;
;
нормальное
 ;
;  .
.
ДИНАМИКА МАТЕРИАЛЬНОЙ ТОЧКИ И ТЕЛА, ДВИЖУЩИХСЯ ПОСТУПАТЕЛЬНО
• Уравнение движения материальной точки (второй закон Ньютона):
в векторной форме:
 , или
, или  ,
,
где  — геометрическая сумма сил, действующих на материальную точку; т — масса; — ускорение;
— геометрическая сумма сил, действующих на материальную точку; т — масса; — ускорение;  — импульс; N — число сил, действующих на точку;
— импульс; N — число сил, действующих на точку;
в координатной форме (скалярной):
 ,
,  ,
, 
или
 ,
,  ,
,  ,
,
где под знаком суммы стоят проекции сил  , на соответствующие оси координат.
, на соответствующие оси координат.
 Сила гравитационного взаимодействия:
Сила гравитационного взаимодействия:
 ,
,
где G — гравитационная постоянная; m 1 и m 2 — массы взаимодействующих тел, рассматриваемые как материальные точки; r — расстояние между ними.
Сила трения скольжения:
 ,
,
где  — коэффициент трения скольжения; N — сила нормального давления.
— коэффициент трения скольжения; N — сила нормального давления.
• Сила упругости:
 ,
,
где k — коэффициент упругости (жесткость в случае пружины);
 — абсолютная деформация.
— абсолютная деформация.
• Координаты центра масс системы материальных точек:
 ,
,  ,
,  ,
,
где mi — масса i -й материальной точки; xi, yi;, zi; — ее координаты.
• Закон сохранения импульса:
 или
или  ,
,
где N — число материальных точек (или тел), входящих в систему.
• Работа, совершаемая постоянной силой:
 или
или  ,
,
где  — угол между направлениями векторов силы
— угол между направлениями векторов силы  и перемещения .
и перемещения .
• Работа, совершаемая переменной силой:
 ,
,
где интегрирование ведется вдоль траектории, обозначаемой L.
• Средняя мощность за интервал времени :
 .
.
• Мгновенная мощность:
 или
или  ,
,
где  — работа, совершаемая за промежуток времени dt.
— работа, совершаемая за промежуток времени dt.
• Кинетическая энергия материальной точки (или тела), движущейся поступательно:
 или
или  .
.
• Потенциальная энергия тела и сила, действующая на тело в данной точке поля, связаны соотношением
 или
или  ,
,
где — единичные векторы (орты). В частном случае, когда поле сил обладает сферической симметрией (как, например, гравитационное),
 .
.
• Потенциальная энергия упругодеформированного тела (сжатой или растянутой пружины)
 .
.
• Потенциальная энергия гравитационного взаимодействия двух материальных точек (или тел) массами m 1, и т 2, находящихся на расстоянии r друг от друга:
 .
.
• Потенциальная энергия тела, находящегося в однородном поле силы тяжести,
 =mgh,
=mgh,
где h — высота тела над уровнем, принятым за нулевой для отсчета потенциальной энергии. Эта формула справедлива при условии  , где R — радиус Земли.
, где R — радиус Земли.
• Закон сохранения энергии в механике выполняется в замкнутой системе, в которой действуют только консервативные силы, и записывается в виде:
 + =const.
+ =const.
ДИНАМИКА ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА ВОКРУГ НЕПОДВИЖНОЙ ОСИ
• Момент силы , действующей на тело, относительно оси вращения:
 ,
,
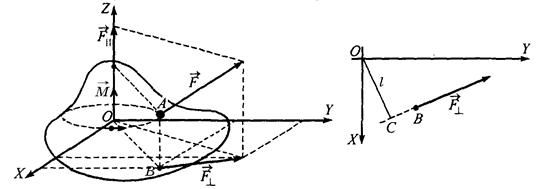 |
где
 — проекция силы на плоскость, перпендикулярную оси вращения; l — плечо силы (кратчайшее расстояние от оси вращения до линии действия силы).
— проекция силы на плоскость, перпендикулярную оси вращения; l — плечо силы (кратчайшее расстояние от оси вращения до линии действия силы).
• Момент инерции относительно оси вращения:
а) материальной точки
 ,
,
где т — масса точки; r — расстояние ее от оси вращения;
б) дискретного твердого тела
 ,
,
где  — масса i-го элемента тела; ri — расстояние этого элемента от оси вращения; N — число элементов тела;
— масса i-го элемента тела; ri — расстояние этого элемента от оси вращения; N — число элементов тела;
в) сплошного твердого тела
 .
.
Если тело однородно, т. е. его плотность  одинакова по всему объему, то
одинакова по всему объему, то
 и
и  ,
,
где V — объем тела.
• Моменты инерции некоторых тел правильной геометрической формы:
| Тело | Ось, относительно которой определяется момент инерции | Формула момента инерции |
| Однородный тонкий стержень массой т и длиной l | Проходит через центр тяжести стержня перпендикулярно стержню | 
|
| Проходит через конец стержня перпендикулярно стержню | 
| |
| Тонкое кольцо, обруч, труба радиусом R и массой т, маховик радиусом R и массой т, распределенной по ободу | Проходит через центр перпендикулярно плоскости основания | 
|
| Круглый однородный диск (цилиндр) радиусом R и массой т | Проходит через центр диска перпендикулярно плоскости основания | 
|
| Однородный шар массой т и радиусом R | Проходит через центр шара | 
|
• Теорема Штейнера. Момент инерции тела относительно произвольной оси:
 ,
,
где J 0 — момент инерции этого тела относительно оси, проходящей через центр тяжести тела параллельно заданной оси; а — расстояние между осями; m — масса тела.
• Момент импульса вращающегося тела относительно оси:
 .
.
• Закон сохранения момента импульса:
 ,
,
где Li — момент импульса i -го тела, входящего в состав системы. Закон сохранения момента импульса для двух взаимодействующих тел:

где  — моменты инерции и угловые скорости тел до взаимодействия:
— моменты инерции и угловые скорости тел до взаимодействия:  — те же величины после взаимодействия.
— те же величины после взаимодействия.
Закон сохранения момента импульса для одного тела, момент инерции которого меняется:
 ,
,
где  — начальный и конечный моменты инерции;
— начальный и конечный моменты инерции;  — начальная и конечная угловые скорости тела.
— начальная и конечная угловые скорости тела.
• Основное уравнение динамики вращательного движения твердого тела относительно неподвижной оси:
 ,
,
где  — момент силы, действующей на тело в течение времени dt;
— момент силы, действующей на тело в течение времени dt;
J — момент инерции тела;  — угловая скорость;
— угловая скорость;  — момент импульса.
— момент импульса.
В случае постоянного момента инерции основное уравнение динамики вращательного движения принимает вид
 ,
,
где  — угловое ускорение.
— угловое ускорение.
• Работа постоянного момента силы М, действующего на вращающееся тело:
A=Mj,
где j — угол поворота тела.
• Мгновенная мощность, развиваемая при вращении тела,
 .
.
• Кинетическая энергия вращающегося тела
 .
.
• Кинетическая энергия тела, катящегося по плоскости без скольжения:
 ,
,
где  — кинетическая энергия поступательного движения тела; v — скорость центра инерции тела;
— кинетическая энергия поступательного движения тела; v — скорость центра инерции тела;  ,— кинетическая энергия вращательного движения тела вокруг оси, проходящей через центр инерции.
,— кинетическая энергия вращательного движения тела вокруг оси, проходящей через центр инерции.
РЕЛЯТИВИСТСКАЯ МЕХАНИКА
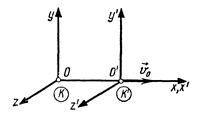 В специальной теории относительности рассматриваются только инерциальные системы отсчета. Во всех задачах считается, что оси у, у' и z, z' сонаправлены, а относительная скорость v 0 системы координат К' относительно системы К направлена вдоль общей оси хх'.
В специальной теории относительности рассматриваются только инерциальные системы отсчета. Во всех задачах считается, что оси у, у' и z, z' сонаправлены, а относительная скорость v 0 системы координат К' относительно системы К направлена вдоль общей оси хх'.
• Релятивистское (лоренцево) сокращение длины стержня:
где l 0 — длина стержня в системе координат К',относительно которой стержень покоится (собственная длина). Стержень параллелен оси х'; l — длина стержня, измеренная в системе К,относительно которой он движется со скоростью  ; с — скорость распространения электромагнитного излучения.
; с — скорость распространения электромагнитного излучения.
• Релятивистское замедление хода часов
 ,
,
где Δ t 0 — интервал времени между двумя событиями, происходящими в одной точке системы  , измеренный по часам этой системы (собственное время движущихся часов); Δ t — интервал времени между двумя событиями, измеренный по часам системы K.
, измеренный по часам этой системы (собственное время движущихся часов); Δ t — интервал времени между двумя событиями, измеренный по часам системы K.
• Релятивистское сложение скоростей
 ,
,
где  — относительная скорость (скорость тела относительно системы K ');
— относительная скорость (скорость тела относительно системы K ');  — переносная скорость (скорость системы K ' относительно К), — абсолютная скорость (скорость тела относительно системы К).
— переносная скорость (скорость системы K ' относительно К), — абсолютная скорость (скорость тела относительно системы К).
В теории относительности абсолютной скоростью называется скорость тела в системе координат, условно принятой за неподвижную.
• Релятивистский импульс:
 .
.
• Полная энергия релятивистской частицы
 ,
,
где T — кинетическая энергия частицы;  — ее энергия покоя. Частица называется релятивистской, если скорость частицы сравнима со скоростью света, и классической, если
— ее энергия покоя. Частица называется релятивистской, если скорость частицы сравнима со скоростью света, и классической, если  .
.
• Связь полной энергии с импульсом релятивистской частицы:
 .
.
• Связь кинетической энергии с импульсом релятивистской частицы
 .
.
МЕХАНИЧЕСКИЕ КОЛЕБАНИЯ
• Уравнение гармонических колебаний:

где х — смещение колеблющейся точки от положения равновесия;
t — время; А, ω, φ — соответственно амплитуда, угловая частота,
начальная фаза колебаний;  — фаза колебаний в момент t.
— фаза колебаний в момент t.
• Угловая частота колебаний:
 , или
, или  ,
,
где ν и Т — частота и период колебаний.
• Скорость точки, совершающей гармонические колебания:
 .
.
• Ускорение при гармоническом колебании
 .
.
• Амплитуда А результирующего колебания, полученного при сложении двух колебаний с одинаковыми частотами, происходящих по одной прямой, определяется по формуле:

где А 1и А 2 — амплитуды составляющих колебаний; φ 1 и φ 2— их начальные фазы.
• Начальная фаза φ результирующего колебания может быть найдена из формулы:
 .
.
• Частота биений, возникающих при сложении двух колебаний, происходящих по одной прямой с различными, но близкими по значению частотами ν 1 и ν 2,
 .
.
• Уравнение траектории точки, участвующей в двух взаимно перпендикулярных колебаниях с амплитудами A 1 и A 2 и начальными фазами φ 1 и φ 2:
 .
.
• Дифференциальное уравнение гармонических колебаний материальной точки:
 , или
, или  ,
,
где m — масса точки; k — коэффициент квазиупругой силы ( ).
).
• Полная энергия материальной точки, совершающей гармонические колебания:
 .
.
• Период колебаний тела, подвешенного на пружине (пружинный маятник):
 ,
,
где m — масса тела; k — жесткость пружины. Формула справедлива для упругих колебаний в пределах, в которых выполняется закон Гука (при малой массе пружины в сравнении с массой тела).
Период колебаний математического маятника
 ,
,
где l — длина маятника; g — ускорение свободного падения.
Период колебаний физического маятника
 ,
,
где J — момент инерции колеблющегося тела относительно оси колебаний; а — расстояние центра масс маятника от оси колебаний;  — приведенная длина физического маятника.
— приведенная длина физического маятника.
Приведенные формулы являются точными для случая бесконечно малых амплитуд. При конечных амплитудах эти формулы дают лишь приближенные результаты. При амплитудах не более  ошибка в значении периода не превышает 1 %.
ошибка в значении периода не превышает 1 %.
Период крутильных колебаний тела, подвешенного на упругой нити:
 ,
,
где J — момент инерции тела относительно оси, совпадающей с упругой нитью; K — жесткость упругой нити, равная отношению упругого момента, возникающего при закручивании нити, к углу, на который нить закручивается.
• Дифференциальное уравнение затухающих колебаний
 или
или  ,
,
где r — коэффициент сопротивления; δ — коэффициент затухания:  ; ω 0— собственная угловая частота колебаний
; ω 0— собственная угловая частота колебаний  .
.
• Уравнение затухающих колебаний:

где A(t) — амплитуда затухающих колебаний в момент t; ω — их угловая частота.
• Угловая частота затухающих колебаний:
 .
.
• Зависимость амплитуды затухающих колебаний от времени
 ,
,
где А 0 — амплитуда колебаний в момент t =0.
• Логарифмический декремент колебаний:
 ,
,
где A(t) и A(t+T) — амплитуды двух последовательных колебаний, отстоящих по времени друг от друга на период.
• Дифференциальное уравнение вынужденных колебаний
 или
или  ,
,
где  — внешняя периодическая сила, действующая на колеблющуюся материальную точку и вызывающая вынужденные колебания; F0 — ее амплитудное значение;
— внешняя периодическая сила, действующая на колеблющуюся материальную точку и вызывающая вынужденные колебания; F0 — ее амплитудное значение;  .
.
• Амплитуда вынужденных колебаний:
 .
.
• Резонансная частота и резонансная амплитуда:
 и
и  .
.








