 2015-04-01
2015-04-01 1087
1087Основная задача кинематики – изучение движения звеньев механизмов без учета действующих на них сил. Из теоретической механики известно, что при плоскопараллельном движении звена механизма это движение может быть представлено как вращение вокруг точки, называемой мгновенным центром вращения. Геометрическое место мгновенных центров вращения образует центроиду. Иногда центроидами служат кривые весьма сложного вида: самопересекающиеся, с бесконечно удаленными точками и т. д. Поэтому пользоваться механизмами, в которых передача движения осуществляется центроидами, весьма затруднительно.
В конструкторской практике возникают случаи, когда по технологическим условиям требуется, чтобы звенья механизмов в процессе движения занимали определенные положения, а их отдельные точки двигались по заданным кривым. При проектировании часто приходится вписывать отдельные механизмы в предназначенные для них объемы внутри общих габаритов машины. Соответствие воспроизводимой траектории требованиям технологического процесса при заданных габаритах механизма можно установить лишь, решив задачу на определение положений и траекторий точек звеньев.
Для решения задачи регулирования движения машины необходимо знать соотношение между скоростями звеньев. Иногда скорости по технологическим условиям должны изменяться по определенным законам. При проектировании механизмов надо знать действующие на звенья динамические нагрузки в виде сил инерции, что очень важно при расчете звеньев на прочность и при определении потерь на трение. Силы инерции можно определить, зная ускорение звеньев.
Таким образом, при кинематическом исследовании механизмов решаются три основные задачи: определение положений звеньев и построение траекторий точек звеньев; определение линейных и угловых скоростей точек звеньев; определение линейных и угловых ускорений точек звеньев.
2.1.1. Определение положений звеньев и
построение траекторий точек звеньев
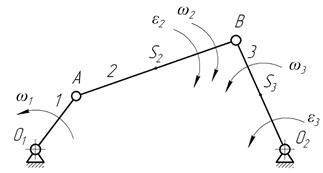
Построение положений звеньев механизма следует начинать с изображения неподвижных элементов кинематических пар О1 и О2 (рис. 2.1), после чего вычертить ведущее звено О1А в заданном положении, и затем изобразить схемы групп Ассура в порядке их присоединения к ведущему звену и стойке. Вычерчивание схемы механизма следует производить в определенном, заранее выбранном, масштабе. В теории механизмов и машин под масштабом понимают число единиц какой-либо величины в одном миллиметре чертежа или схемы. Обозначается буквой k с индексом соответствующей величины. Размерности масштаба длины  ; скорости
; скорости  ; ускорений
; ускорений  .
.
Для построения траекторий точек надо вычертить несколько положений механизма так, чтобы для получения искомой траектории отмеченные в различных положениях механизма отдельные положения заданной точки можно было соединить плавной кривой. Положения механизма необходимо строить для равноотстоящих друг от друга положений ведущего звена, т. е. разбить траекторию кривошипа на 8 или 12 равных частей, и из каждой точки на линии движения ползуна отметить длиной звена АВ точки его положения (1', 2',…,12'). Соединив соответственно точки положений А и В (линии соединения можно не проводить), отметить положение S2, и, соединив плавной кривой точки 1'', 2'',…,12'', получаем траекторию точки S2.
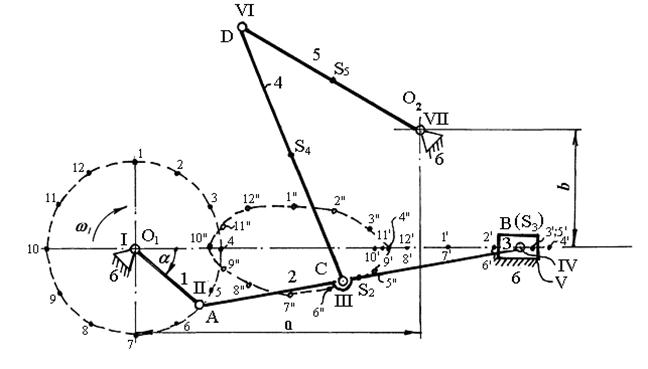
Рис. 2.1.
2.1.2. Определение скоростей и ускорений звеньев механизмов второго класса
Скорости и ускорения звеньев механизма можно определить аналитическим и графическим методом. Если необходимо знать, кроме величины скорости и ускорения, их направления, то используется графический метод – метод планов.
Построение плана скоростей начинаем с расчета угловой скорости кривошипа О1А (рис. 2.2, а) по формуле, 1/с:
 | (2.1) |
где n 1 - частота вращения кривошипа, об/мин (задается).
Находим скорость точки А кривошипа, м/с:
 , (2.2)
, (2.2)
где  - длина кривошипа (из задания).
- длина кривошипа (из задания).
 | |
| а | |
 |  |
| б | в |
Рис. 2.2
Вектор скорости точки А ( ) направлен перпендикулярно к оси звена О1А в сторону его вращения. Задавшись длиной отрезка
) направлен перпендикулярно к оси звена О1А в сторону его вращения. Задавшись длиной отрезка  (произвольно, в пределах 80 - 100 мм), который на плане будет изображать вектор скорости , определяем масштабный коэффициент плана скоростей, м/с∙мм-1:
(произвольно, в пределах 80 - 100 мм), который на плане будет изображать вектор скорости , определяем масштабный коэффициент плана скоростей, м/с∙мм-1:
 . (2.3)
. (2.3)
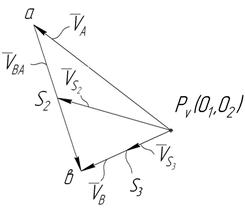
Из произвольной точки Р v, в которой помещены и точки опор О1 и О2, откладываем перпендикулярно к звену О1А отрезок  , направив его в сторону вращения кривошипа (рис. 2.2, б).
, направив его в сторону вращения кривошипа (рис. 2.2, б).
Из курса теоретической механики известно, что скорость любой точки звена может быть представлена в виде геометрической суммы переносной и относительной скоростей. Для дальнейшего построения плана скоростей и определения скорости точки В составляем уравнения:
 ; (2.4)
; (2.4)
 , (2.5)
, (2.5)
где  - скорость точки А, известна по значению и направлению;
- скорость точки А, известна по значению и направлению;
 - относительная скорость точки В во вращении вокруг точки А;
- относительная скорость точки В во вращении вокруг точки А;
 - скорость точки О2 (опоры), равна нулю;
- скорость точки О2 (опоры), равна нулю;
 - относительная скорость точки В во вращении вокруг точки О2.
- относительная скорость точки В во вращении вокруг точки О2.
Относительные скорости  и
и  известны только по линии их действия:
известны только по линии их действия:  перпендикулярна к звену механизма АВ и проводится на плане из точки а (конец вектора
перпендикулярна к звену механизма АВ и проводится на плане из точки а (конец вектора  );
);  перпендикулярна к звену ВО2 и проводится на плане из точки О2 (полюс плана скоростей РV). На пересечении этих двух линий действия получим точку b - конец вектора скорости
перпендикулярна к звену ВО2 и проводится на плане из точки О2 (полюс плана скоростей РV). На пересечении этих двух линий действия получим точку b - конец вектора скорости  точки В. Направление скорости
точки В. Направление скорости  определяется направлением вектора
определяется направлением вектора  .
.
Вектор  изображает скорость
изображает скорость  точки В в относительном вращении вокруг точки А.
точки В в относительном вращении вокруг точки А.
Исходя из теоремы подобия (см. свойства плана скоростей), находим на плане точки S 2 и S 3, соответствующие центрам тяжести звеньев 2 и 3, и, соединив эти точки с полюсом плана скоростей РV, получим векторы скоростей этих звеньев -  и
и  .
.
С помощью масштабного коэффициента kV определяем скорость всех точек механизма, м/с:
 ; (2.6)
; (2.6)
 ; (2.7)
; (2.7)
 ; (2.8)
; (2.8)
 ; (2.9)
; (2.9)
 . (2.10)
. (2.10)
Чтобы определить угловую скорость, 1/с, звеньев 2 и 3, надо их относительную скорость разделить на длину звена, м (из задания):
 (2.11)
(2.11)
 (2.12)
(2.12)
Направление скорости ω2 (см. рис. 2.2, а) будет соответствовать направлению вектора  перенесенного мысленно в точку В звена при предположении, что точка А неподвижна.
перенесенного мысленно в точку В звена при предположении, что точка А неподвижна.
Направление скорости ω3 относительно точки О2 звена 3 определяется аналогично.
Построение плана ускорений начинаем с определения ускорения точки А кривошипа. Так как звено АО1 вращается равномерно, то точка А имеет только нормальное ускорение, направленное по звену АО1 к центру вращения
О1, м/с2:
 (2.13)
(2.13)
Приняв произвольно (в пределах 80 - 100 мм) длину отрезка  ,
,
изображающего вектор ускорения  точки А, определяем масштабный коэффициент плана ускорений, м/с2∙мм-1:
точки А, определяем масштабный коэффициент плана ускорений, м/с2∙мм-1:
 . (2.14)
. (2.14)
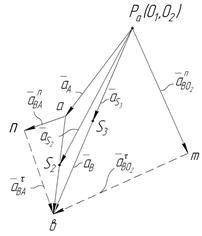
Из произвольной точки Ра, принятой за полюс плана ускорений, откладываем параллельно звену О1А в направлении от точки А к точке О1 (на механизме) отрезок  (рис. 2.2, в).
(рис. 2.2, в).
По аналогии с планом скоростей составляем уравнения для определения ускорения точки В:
 ; (2.15)
; (2.15)
 . (2.16)
. (2.16)
Полные относительные ускорения  и
и  представляем в виде суммы составляющих – нормальной, направленной по оси соответствующего звена к
представляем в виде суммы составляющих – нормальной, направленной по оси соответствующего звена к
центру вращения в относительном движении, и тангенциальной, перпендикулярной к этому звену. Эти уравнения записываем в виде:
 ; (2.17)
; (2.17)
 . (2.18)
. (2.18)
В уравнениях (2.17) и (2.18) известны значение ускорения аА и его направление, ускорение  = 0 (опора). Определяем значения нормальных ускорений, м/с2:
= 0 (опора). Определяем значения нормальных ускорений, м/с2:
 ; (2.19)
; (2.19)
 . (2.20)
. (2.20)
С помощью масштабного коэффициента kа вычисляем значения векторов этих ускорений, мм:
 ; (2.21)
; (2.21)
 . (2.22)
. (2.22)
Из точки а на плане ускорений параллельно звену АВ в направлении от точки В к точке А по оси звена АВ откладываем вектор  (см. рис. 2.2, в), затем через его конец проводим перпендикулярно к звену АВ линию действия тангенциального ускорения
(см. рис. 2.2, в), затем через его конец проводим перпендикулярно к звену АВ линию действия тангенциального ускорения  (пунктирной линией). Из точки Ра параллельнозвену ВО2 в направлении от точки В к точке О2 по оси звена ВО2 откладываем вектор
(пунктирной линией). Из точки Ра параллельнозвену ВО2 в направлении от точки В к точке О2 по оси звена ВО2 откладываем вектор  , затем через его конец проводим перпендикулярнок звену ВО2 линию действия тангенциального ускорения
, затем через его конец проводим перпендикулярнок звену ВО2 линию действия тангенциального ускорения  (пунктирной линией). Точка пересечения линий тангенциальных ускорений будет искомой точкой в, соединив ее с полюсом плана, получим вектор ускорения точки В механизма.
(пунктирной линией). Точка пересечения линий тангенциальных ускорений будет искомой точкой в, соединив ее с полюсом плана, получим вектор ускорения точки В механизма.
Просуммировав графически нормальные и тангенциальные ускорения, получим векторы полных относительных ускорений  и
и  (см. рис. 2.2, в).
(см. рис. 2.2, в).
С помощью масштабного коэффициента kа определяем ускорения всех точек механизма, м/с2:
 ; (2.23)
; (2.23)
 ; (2.24)
; (2.24)
 ; (2.25)
; (2.25)
 ; (2.26)
; (2.26)
 ; (2.27)
; (2.27)
 . (2.28)
. (2.28)
Угловое ускорение кривошипа О1А равно нулю, так как угловая скорость его постоянна.
Для второго звена (АВ) угловое ускорение определяем по формуле, 1/с2:
 ; (2.29)
; (2.29)
для третьего звена (ВО2) –
 . (2.30)
. (2.30)
Направление углового ускорения зависит от направления тангенциального: для звена АВ вектор  мысленно переносим в точку В (точка В вращается относительно точки А по ходу часовой стрелки), что и определяет направление ε2. Угловое ускорение ε 3 звена О2В направлено тоже по ходу часовой стрелки.
мысленно переносим в точку В (точка В вращается относительно точки А по ходу часовой стрелки), что и определяет направление ε2. Угловое ускорение ε 3 звена О2В направлено тоже по ходу часовой стрелки.
Если в механизме есть звенья, движущиеся поступательно (ползуны), то значения их угловых скоростей и ускорений равны нулю.
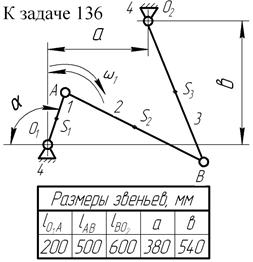
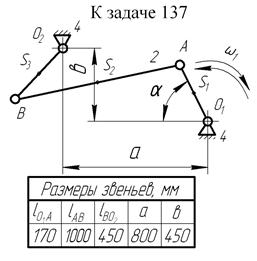
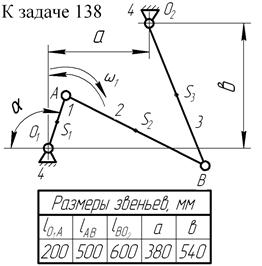
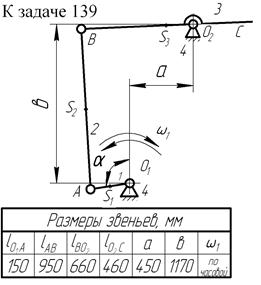
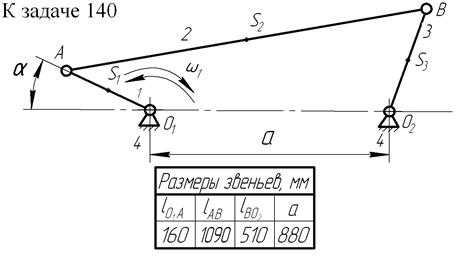
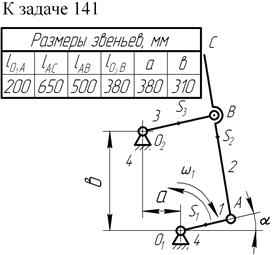
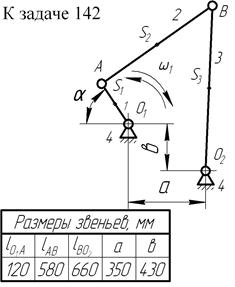
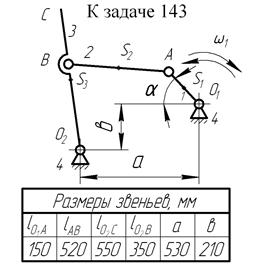
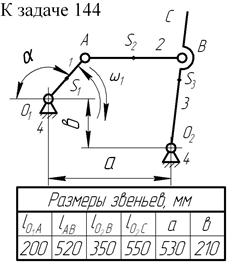
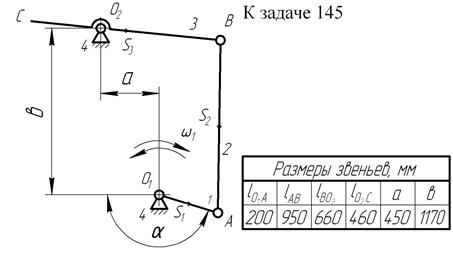
Для закрепления материала предлагаются задачи, в которых требуется определить скорости и ускорения, угловые скорости и угловые ускорения механизмов. Принять для всех схем угол a = 45º, частоту вращения кривошипа n1 = 150 об/мин, направление вращения кривошипа – правое.
ЗАДАЧИ 136 – 145
 |  | |
 |  | |
 | ||
 |  | |
 |  | |
 | ||

