 2015-04-01
2015-04-01 673
673Выходное напряжение (ток) стабилизатора (преобразователя) требуется поддерживать с заданной степенью точности» изменять по заданной во времени или от каких-то других параметров зависимости. При работе от сети переменного тока преобразователь должен поддерживать синусоидальную форму тока, обеспечивая высокий коэффициент мощности на входе устройства.
Выходной параметр преобразователя – ток или напряжение следует считать управляемой переменной. Характерным для преобразователя является наличие управляющего воздействия на объект (нагрузку), которое, в свою очередь, может зависеть от управляемой переменной, задающего воздействия и возмущения.
Принято различать следующие принципы управления, находящие широкое практическое применение:
– т по разомкнутому циклу;
– по замкнутому циклу;
– по комбинированному (замкнуто-разомкнутому) циклу.
Согласно первому принципу управления система является разомкнутой и не использует обратную связь. Сигнал управления вырабатывается в функции в возмущения таким образом, чтобы воздействие возмущения на систему компенсировалось.
Структурная схема разомкнутой системы с управлением по возмущению показана на рисунке 11.6, где Р – регулятор по возмущению, формирующий управляющий сигнал в зависимости от возмущающего воздействия; РО –регулирующий орган объекта, то есть выходной каскад преобразователя; ОУ – объект управления; ЗУ – задающее устройство, формирующее задающее воздействие; x(t) – управляемая переменная; xQ(t) – задающее воздействие.
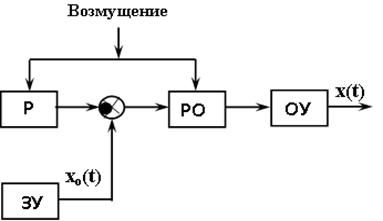
Рисунок 11.6 – Структурная схема разомкнутой системы.
Принцип управления по замкнутому циклу (принцип управления по отклонению переменной, принцип обратной связи (ОС)) является наиболее широко применяемым. В соответствии с данным принципом воздействие на регулирующий орган объекта (РО) вырабатывается через управляющее устройство – регулятор (Р) как функция отклонения  регулируемой переменной x(t) от предписанного задающего воздействия x0(t).
регулируемой переменной x(t) от предписанного задающего воздействия x0(t).
Структурная схема показана на рисунке 11.7. Принято обратную связь, доставляющую управляющий сигнал к регулятору Р, называть главной ОС.
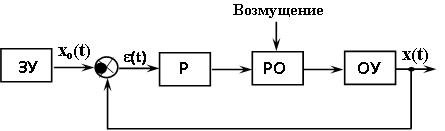
Рисунок 11. 7 – Структурная схема замкнутой системы
Системы управления по возмущению, если сравнивать их с системами, реагирующими на отклонение, обычно отличаются большей устойчивостью и более высоким быстродействием. К их недостаткам следует отнести неполный учет возмущений, поскольку компенсируются только те воздействия, которые измеряются и поступают через соответствующий регулятор РВ. В некоторых случаях становится эффективным использование комбинированного управления, как по возмущению, так и по отклонению.
Структурная схема комбинированного управления показана на рисунке11.8.
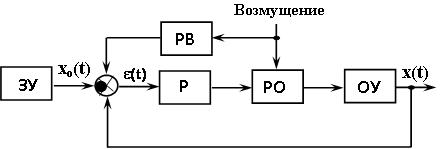
Рисунок 11. 8 – Структурная схема комбинированной системы
Основные режимы функционирования в преобразовательных устройствах является режим стабилизации, когда поддерживается постоянным значение управляемой переменной (x(t) = const), и режим программного управления, то есть поддержание заданной функции времени переменной x(t).








