 2015-05-05
2015-05-05 1992
1992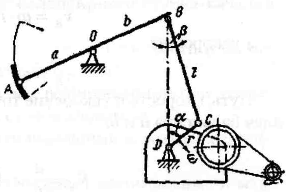 Кинематическая схема преобразующего механизма балансирного станка-качалки представляет четырехзвенник ОВCD (рис. 4.35.). Неподвижное звено - ОD (расстояние от О до D), подвижные звенья - кривошип r, шатун l и заднее плечо балансира b.
Кинематическая схема преобразующего механизма балансирного станка-качалки представляет четырехзвенник ОВCD (рис. 4.35.). Неподвижное звено - ОD (расстояние от О до D), подвижные звенья - кривошип r, шатун l и заднее плечо балансира b.
 При вращении кривошипа точка С описывает окружность радиуса r, а точка В движется по дуге радиуса b.
При вращении кривошипа точка С описывает окружность радиуса r, а точка В движется по дуге радиуса b.
Для упрощения определения закона движения точки В в расчетах делают некоторые допущения, а именно:
- точка В движется не по дуге, а по прямой;
- принимают r/l = 0; r/b = 0, т. е. считают, что радиус кривошипа намного меньше длины балансира;
- угол β образованный шатуном и линией, соединяющей центр кривошипа, с точкой В, принимают равным нулю.
В этом случае закон движения точки В соответствует закону движения поршня насоса с кривошипно-шатунным механизмом.
При уточненных расчетах учитывают конечную длину шатуна, так как при значительной длине хода (4,5... 6 м) отношение радиуса кривошипа к длине шатуна r/l становится значительной величиной. Однако и в этом случае делают допущение, считая, что траектория движения точки В прямолинейна.
-177-
При точных расчетах учитывают и кривизну траектории движения точки В, что позволяет уменьшить погрешность расчета.
Найдем закон движения точки подвеса штанг, т. е. определим путь, скорость и ускорение точки В во времени.
Путь S, пройденный точкой В при повороте кривошипа на угол α (точка В займет новое положение B1), равен:

тогда ВD будет равно r+ l, а из треугольника ВСD следует  =r
=r  , откуда:
, откуда:
 1-
1- 
С учетом допущений, принятых в элементарной теории, что β= 0, будем иметь:
 (4.15)
(4.15)
Скорость движения точки В будет равна:
 (4.16)
(4.16)
а ускорение:
 (4.17)
(4.17)
Путь, скорость и ускорение точки А определяются соотношением плеч балансира а и b:
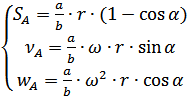 (4.18)
(4.18)
здесь ω - угловая скорость вращения кривошипа.
Графики изменения скорости и ускорения точки подвеса колонны штанг - это синусоида и косинусоида соответственно. Графическое изображение см. аналогично рис. 1.2.
Более точно закономерность изменения перемещения, скорости и ускорения точки подвеса штанг может быть определена с помощью приближенной теории (приближенного расчета).
Кинематическое совершенство станка - качалки характеризуется коэффициентом:

-178-
где  - максимальное ускорение точки подвеса штанг станка -качалки, определяемое по точной теории,
- максимальное ускорение точки подвеса штанг станка -качалки, определяемое по точной теории,
 - ускорение при гармоничном движении.
- ускорение при гармоничном движении.
Для определения показателя т удобно пользоваться следующей формулой:
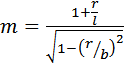 (4.19)
(4.19)
В зависимости от глубины подвески насоса допустимый коэффициент кинематического совершенства изменяется и для глубоких скважин должен быть
т  1,3.
1,3.








