 2015-05-05
2015-05-05 336
336Включение обмотки статора в трехфазную сеть (рис. 4) вызывает возникновение в ней соответствующих токов, возбуждающих вращающееся магнитное поле статора с частотой вращения:
n1=  f = 50 Гц
f = 50 Гц
P =2
и угловой скоростью:
ω1= 
где f - частота тока в обмотке, Р - число пар полюсов. П а
Это поле наводит в короткозамкнутой обмотке ротора ЭДС, под влиянием которых в ней возникают индуктированные токи, взаимодействующие с вращающимся магнитным полем статора, в результате чего ротор начинает вращаться с частотой вращения n2 = n1(l-S), пропорционально угловой скорости ω2 = ω1 (l-S), где S - величина скольжения, определяемая по формуле:
S= 
Изменение направления вращения ротора достигается изменением порядка следования фаз напряжения трехфазной сети, за счет перемены местами любых двух проводов, подведенных к обмотке статора. Частота вращения магнитного поля статора при холостом ходе близка к частоте
вращения ротора, и скольжение при этом режиме составляет доли процента. При нагрузке частота вращения ротора несколько уменьшается, а скольжение увеличивается и достигает при номинальной мощности на валу значения
Sh= 3 - 8%.
Зависимость вращающего момента асинхронного двигателя от скольжения S определяется кривой М =f(S) (рис. 5), вид которой зависит от типа обмотки ротора. Обычно работа асинхронного двигателя протекает на прямолинейном участке характеристики M=f(S) при небольшом скольжении S < SH (порядка нескольких процентов) и моменте М, не превышающем его номинального значения, выраженного в ньютон-метрах:
MH =9550 
где Р2н - номинальная мощность двигателя, 0,55 кВт;
n 2н - номинальная частота вращения ротора, об/мин.
Кратковременная нагрузка асинхронного двигателя ограничена величиной максимального момента Мmах, которому соответствует критическое скольжение Sk, и допустимым тепловым режимом машины.
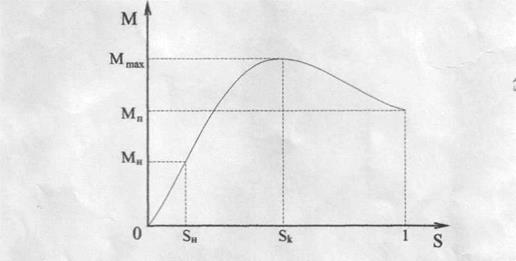
Рис.5
Зависимость вращающего момента асинхронного двигателя от скольжения
Отношение пускового момента к номинальному λм =  является
является
важной характеристикой асинхронных двигателей и составляет от 0,8 до 2, а кратность пускового тока по отношению к номинальному
определяется величиной λI=  ,которая составляет от 4 до 7, а иногда и выше.
,которая составляет от 4 до 7, а иногда и выше.
Трехфазный асинхронный двигатель с коротко замкнутым ротором характеризуется следующими номинальными величинами: мощностью Р2н на валу, линейным напряжением Uлн, линейным током Iн, типом соединения фаз статора, коэффициентом мощности cosφн и КПДηн, которые приводятся на табличке машины и соответствуют номинальному тепловому режиму при температуре окружающего воздуха +40 °С, а величины λми λIнаходят из соответствующих каталогов электрооборудования.
Свойства асинхронного двигателя определяются его механической характеристикой n2 = F(M) рис. 6. и рабочими характеристиками:
n2 = F1(P2), S = F2(P2), M = F3(P2),
I1 = F4(P2), cos φ = F5(P2), n = F6(P2).
При Uл = const и f = const (рис. 6 б), где М и Р2 - соответственно момент и мощность на валу двигателя.
Мощность Р2 на валу двигателя можно определить так:
P2=I2U2+I22 r0
где U- напряжение на нагрузке,
I - ток нагрузки,
r0 - сопротивление обмотки якоря и сопротивление перехода коллектор-щетки, равное 1,3 Ом.
При вращении ротора с частотой вращения n2, тормозной момент на валу двигателей определяется по формуле:
MH =9550 

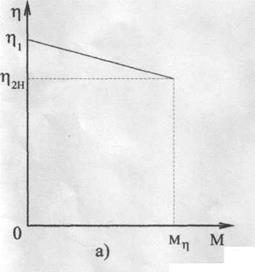
Рис.6
Характеристика асинхронного двигателя: а) механическая, б) рабочие.
Коэффициент мощности асинхронного двигателя находят по формуле:
Cos φ 
а КПД вычисляется по формуле:
η= 
где 3P1 - активная мощность, потребляемая двигателем,
Uл и I1 - соответственно лнейное напряжение и ток.








