 2015-05-20
2015-05-20 461
461Для выбора вентилей определяется среднее значение тока вентиля по формуле (2.12):
 (2.12)
(2.12)
где  коэффициент схемы по среднему току вентиля
коэффициент схемы по среднему току вентиля

Номинальный ток вентиля по формуле (2.13):
 (2.13)
(2.13)
где  — коэффициент запаса, выбираемый исходя из надежности работы вентиля с учетом пусковых токов
— коэффициент запаса, выбираемый исходя из надежности работы вентиля с учетом пусковых токов

Величина тока, проходящего через вентиль при коротком замыкании на стороне постоянного тока:

Полагая, что кратковременный допустимый ток, протекающий через вентиль, не должен превышать 15-тикратного значения номинального тока, найдем номинальный ток вентиля
Так как  , то принимаем номинальный ток вентиля
, то принимаем номинальный ток вентиля  .
.
Максимальная величина обратного напряжения, прикладываемого к вентилю, определяется по формуле (2.14):
 (2.14)
(2.14)
где  – коэффициент схемы по максимальному напряжению вентиля.
– коэффициент схемы по максимальному напряжению вентиля.

Активное сопротивление трансформатора, приведенный к цепи выпрямленного тока по формуле(2.15):
 (2.15)
(2.15)
где Uа - активная составляющая напряжения короткого замыкания трансформатора, Uа=4,5%=0,045;
 - мощность короткого замыкания трансформатора, Вт;
- мощность короткого замыкания трансформатора, Вт;
a – число параллельных проводов, а=3;
m – число фаз, m=3;
I2Л – выпрямленный ток.

Индуктивноесопротивлениетрансформатора, приведенноек цепи випрямленого тока:
Сопротивление, которое вносится за счет перекрытия анодных токов:
де т – коэффициент пульсаций. Для трехфазной мостовой схемы т = 6.
Сопротивление контакта щеток:
Индуктивностьтрансформатора, приведення к контуру двигателя:

Индуктивность двигателя:

Активноесопротивлениесглаживающегодроселя:
где  - падение напряжения на сглаживающем дросселе
- падение напряжения на сглаживающем дросселе

Сопротивление обмотки якоря:

Расчетноеактивноесопротивлениецепи якоря:
где Rпр – сопротивление проводников, Rпр < 1,5 Ом.
Граничный угол регулирования по формуле(2.16):
 (2.16)
(2.16)
где ωmin– скорость вращения электродвигателя, которая отвечает нижней границе регулирования:
kФн – конструктивный коэффициент двигателя:

 - выпрямленная ЭДС преобразователя при условном холостом ходе и
- выпрямленная ЭДС преобразователя при условном холостом ходе и  по выражению (2.17):
по выражению (2.17):
 (2.17)
(2.17)
где 


 .
.

 .
.
По  определим относительную величину эффективного значения первой гармоники напряжения –
определим относительную величину эффективного значения первой гармоники напряжения –  (рисунок 2.2).
(рисунок 2.2).
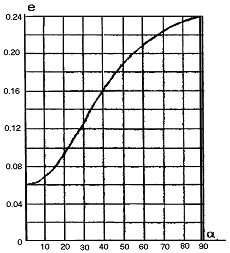
Рисунок 2.2 – Зависимость  для трехфазной мостовой схемы
для трехфазной мостовой схемы
Индуктивность сглаживающего дроселя:
Расчетная индуктивность якорной цепи:

Машинная постоянная
Электромеханическая постоянная времени:
Таблица №1 – технические характеристики комплексного тиристорного устройства КТУ-К20
| Наименование параметров | Норма | Примечание | |
| Количество приводов | 2…7 | ||
| Номинальный выпрямленный ток приводов, А | 250…2000 | ||
| Номинальное выпрямленное напряжение приводов, В | 460, 825 | ||
| Номинальная частота питающей сети, Гц | |||
| Связь с питающей сетью главных приводов | Трансфор- маторная | С питанием всех приводов от общих шин | |
| Связь с питающей сетью привода РПД | Реакторная | ||
| Статическая точность поддержания заданной частоты вращения главных приводов, % не более | |||
| Допустимое изменение напряжения питания, % Длительно Кратковременно | Плюс 10 Минус 15 ± 20 | ||
| Допустимые изменения частоты питающей сети, % | ± 5 | ||
| Максимальная кратность циклической перегрузки по току, относительных единиц (о.е.) | 2,0 | Среднеквадратичное значение тока за цикл 60 с не должно превышать номинального значения | |
| Длительность циклической перегрузки, с, не более | |||
| Номинальный выпрямленный ток преобразователя системы компенсации реактивной мощности, А | |||
| Связь с питающей сетью преобразователя системы компенсации реактивной мощности | Реакторная |
2.4 Построение электромеханических характеристик двигателя
Уравнение механической характеристики двигателя постоянного тока независимого (параллельного) возбуждения имеет следующий вид:
 (2.18)
(2.18)
Использую паспортные данные двигателя, определим:
– угловую скорость идеального холостого хода:

– номинальный момент:

На основе полученных данных, определим угловые скорости, необходимые для построения электромеханической характеристики при минимальном напряжении:
– минимальную угловую скорость:

– угловую скорость идеального холостого хода при минимальном напряжении:

– угловые скорости при 


Таким образом, электромеханические характеристики при питании от сети на основе рассчитанных данных представлены на рисунке 2.4.
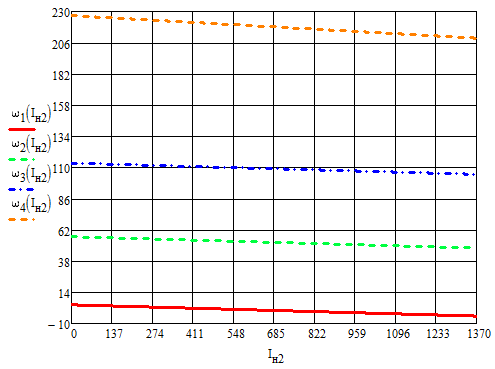
Рисунок 2.4 — Электромеханические характеристики при питании от сети
Диапазон регулирования скорости в первой зоне (изменением напряжения):
Диапазон регулирования скорости во второй зоне (изменением  ):
):
Полный диапазон регулирования:

Жесткость механической характеристики:
Статизм механической характеристики:

Построение электромеханических характеристик двигателя при питании от преобразователя в разомкнутой системе производиться по формуле:
 (2.19)
(2.19)
Характеристику нужно строить при углах управления  (обеспечивает получение номинальной скорости
(обеспечивает получение номинальной скорости  при номинальном токе нагрузки);
при номинальном токе нагрузки);  (обеспечивает минимальную скорость при номинальном напряжении).
(обеспечивает минимальную скорость при номинальном напряжении).
Значение  находим по формуле:
находим по формуле:
 (2.20)
(2.20)

 (2.21)
(2.21)

По рассчитанным данным построены электромеханические характеристики двигателя при питании от тиристорного преобразователя в разомкнутой системе регулирования. Они представлены на рисунке 2.5.
Жесткость электромеханической характеристики:
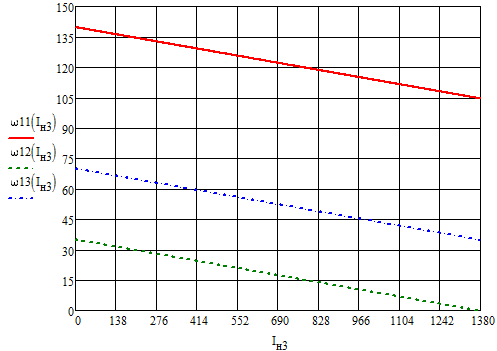
Рисунок 2.5 — Электромеханические характеристики двигателя при питании от тиристорного преобразователя в разомкнутой системе регулирования
Статизм электромеханической характеристики:

По построенным электромеханическим характеристикам видно, что при питании двигателя от тиристорного преобразователя параметры лучше, чем при питании от сети, а именно уменьшается жесткость характеристики, а также статизм.








