 2015-05-20
2015-05-20 574
574Под синтезом САУ понимают работу по расчету ее рациональной структуры и оптимальных параметров отдельных элементов. При решении задачи синтеза часть структуры системы, например, объект управления, регулирующие органы, средства измерения и т.д., известны. Неизвестной является регулирующая часть САУ. Задачей математического синтеза является определение оптимального, т.е. наилучшего в данных условиях, алгоритма или закона регулирования.
Для большинства используемых в тепловой автоматике САУ структура и алгоритмы регулирования известны. Например, САР уровня жидкости, так называемый трехимпульсный регулятор, реализующий пропорционально-интегральный закон, обеспечивает требуемое качество регулирования. В этом случае задача синтеза сводится к расчету параметров этого регулятора на основе характеристик конкретного объекта, регулирующих органов и т.д.
Такую задачу часто называют инженерным синтезом. Задачу инженерного синтеза можно считать завершенной, если расчет качества ожидаемого переходного процесса удовлетворяет требованиям к системе. Не исключены случаи, когда в рамках выбранной структуры это сделать не удается. Тогда приходится использовать дополнительные сигналы, например, возмущения, производимые от отклонения, использовать местные обратные связи, вводить корректирующие устройства.
Имея в наличии структуру, алгоритм и его численные параметры, можно решать третью задачу – техническую реализацию. В подавляющем большинстве случаев регулятор собирается из стандартных блоков, поэтому под синтезом понимают более узкую задачу – расчет корректирующих устройств САУ.
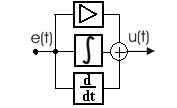
Рис. 18 Схема, иллюстрирующая принцип работы ПИД-регулятора.
Пропорционально-интегрально-дифференциальный (ПИД) регулятор — устройство в цепи обратной связи, используемое в системах автоматического управления для поддержания заданного значения измеряемого параметра. ПИД-регулятор измеряет отклонение стабилизируемой величины от заданного значения (уставки) и выдаёт управляющий сигнал, являющийся суммой трёх слагаемых, первое из которых пропорционально этому отклонению, второе пропорционально интегралу отклонения и третье пропорционально производной отклонения (или, что то же самое, производной измеряемой величины).
Если какие-то из составляющих не используются, то регулятор называют пропорционально-интегральным, пропорционально-дифференциальным, пропорциональным и т. п.








