 2015-05-10
2015-05-10 365
365Лабораторная работа №3
Повышение точности САУ
Цель работы: изучение на примере способов повышения точности САУ. Определение достоинств и недостатков подходов.
Дана передаточная функция разомкнутой системы
 ,
,
где K =10, T 1=0.1c, T 2=0.01c, T 3=0.007c.
Уменьшить уровень установившейся ошибки до хуст(t)  0.05 следующими способами:
0.05 следующими способами:
1. Увеличение коэффициента усиления K разомкнутой цепи;
2. Повышение порядка астатизма  ;
;
3. Применение регулирования по производным;
4. Использование комбинированного управления (в теории);
5. Введение неединичных обратных связей (в теории);
6. Включение масштабирующих устройств на входе или выходе.
Ход выполнения работы.
1. Увеличение коэффициента усиления K разомкнутой цепи.
Ошибка системы будет тем меньше, чем больше K, но увеличение коэффициента передачи приводит к приближению к границе устойчивости, в результате чего увеличивается динамическая ошибка системы.
Определим коэффициент передачи, при котором уровень установившейся ошибки не будет превышать уровень 0.05. Для этого подсчитаем первый коэффициент ошибки С 0.
 ,
,
 .
.
Определяем K.
 .
.
Отсюда

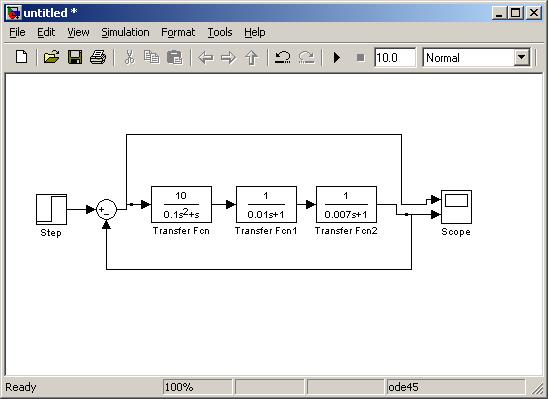
Проверим полученное значение на модели в Simulink. Для получения более удачного графика функции переходного процесса необходимо поменять настройки. Например, уменьшить время эксперимента, если потребуется, уменьшить величину шага при вычислениях(max step size) или же сменить метод решения. Это можно сделать в настройках моделирования, нажав Cntr+E.
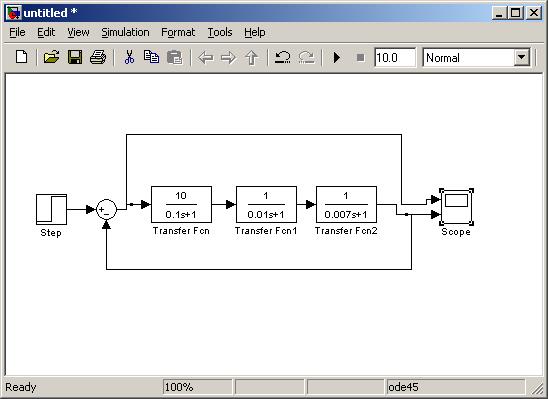
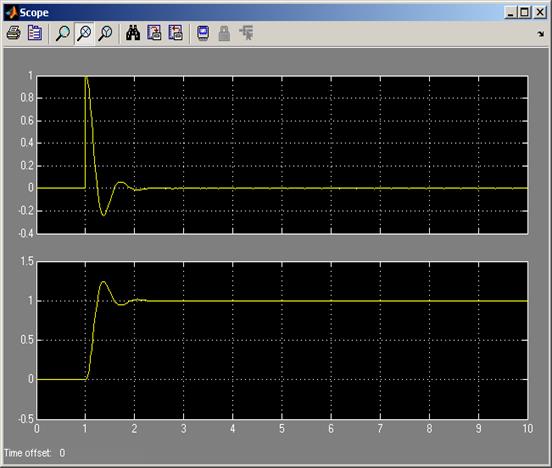
Результат моделирования (верхний график – ошибка, нижний – переходный процесс)
Из полученных результатов видно, что время переходного процесса t пп=0,1с (т.к. время подачи единичного импульса 0.1с), х уст(t)  0,085.
0,085.
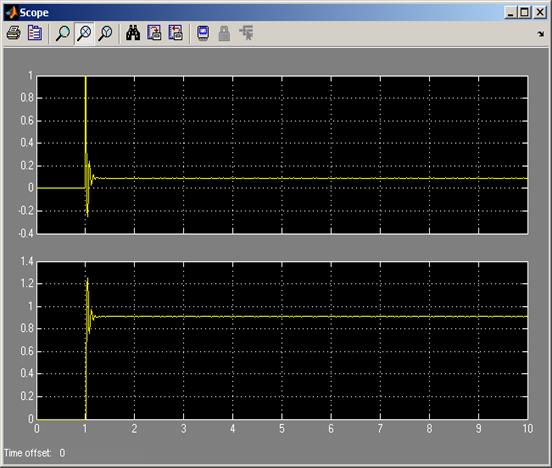
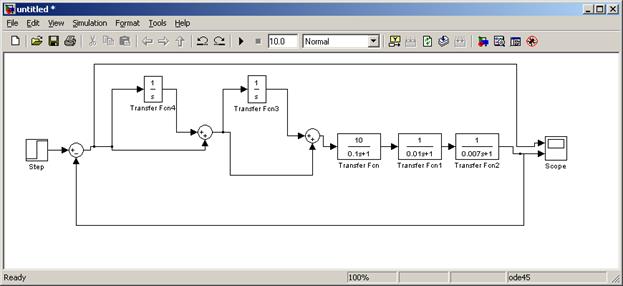
Увеличим коэффициент статической передачи до К =20.
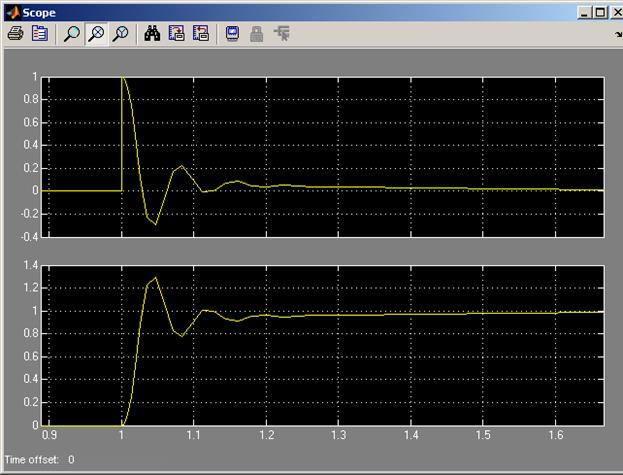
Результат моделирования при K =20
Из графиков видно, что tпп 0.3с, х уст(t)=0.0475.
Установившаяся ошибка уменьшилась, однако динамическая увеличилась. Ее можно оценить по интегральным критериям качества, например, по СКО (среднему квадратическому отклонению).
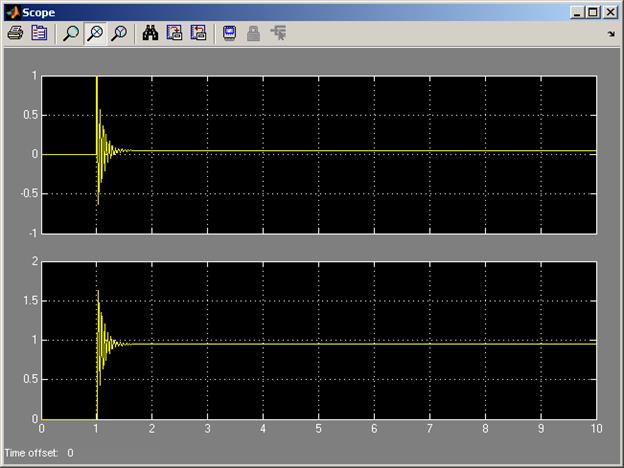
2. Повышение порядка астатизма .

Результат моделирования
Из графика видно, что время переходного процесса возросло за счет добавления интегрирующего звена t пп=1с, х уст(t)=0. Таким образом, удалось избавиться от установившейся ошибки от ненулевого постоянного сигнала, однако, увеличение порядка астатизма сделало систему более замедленной в действии, и запас устойчивости уменьшился. Очевидно, что уже при  система потеряет устойчивость. Это затруднение можно избежать, применяя изодромные устройства.
система потеряет устойчивость. Это затруднение можно избежать, применяя изодромные устройства.








