 2015-05-10
2015-05-10 508
508Лабораторная работа № 4.
«Синтез системы формирования
Механических характеристик
электропривода кранового механизма» .
Вариант 8
Студент группы 11-ЭиЭ:
Сорокин В.В.
Преподаватель:
Зотин В.Ф.
Брянск 2014 г.
Цель работы: приобретение навыков выбора структуры и параметров кранового электропривода с заданными механическими характеристиками и его компьютерного моделирования с помощью программного комплекса MATLAB.
Определяем исходные данные.
| Вариант | Электродвигатель | KJ | Δn/nном, % |
| Д816 – 150 кВт – 440 В | 3.5 |
| 3п |
| 2п |
| 1п |
| М МНОМ |
| n/nном |
| -1 |
| -1 |
| -2 |
| 4п |
| 1с |
| 2с |
| 3с |
| 4с |
Рис.1. Заданная статическая характеристика
Основные технические характеристики двигателя Д816 – 150 кВт – 440 В:


1.Выбираем структуру системы управления и определяем параметры ее элементов, обеспечивающие заданные статические характеристики и приемлимые динамические свойства электропривода.
Рассчитываем дополнительные парамерты двигателя и преобразователей:





Принимаем kнас=1, а зависимость Ф=f(Iв) считаем линейной, тогда


Принимаем постоянную времени всех преобразователей 10 мс.
Для получения заданных характеристик используем систему двухзонного регулирования скорости, т.е. будем иметь четыре контура регулирования: по току якоря, по угловой скорости, току возбуждения и ЭДС.
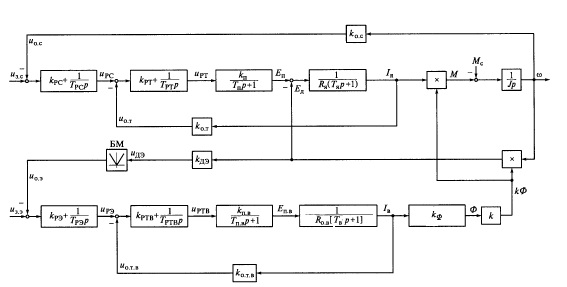
Рис.2. Структурная схема электропривода с двухзонным регулирование скорости
2. Настраиваем контур тока якоря на технический оптимум:
Kот=Uзт/2Iн=10/740=0,0135

Принимаем  .
.

3. Настраиваем контур скорости на технический оптимум. Для упрощения расчётов заменяем контур тока якоря звеном первого порядка:





4. Настраиваем контур тока возбуждения на технический оптимум:
Kотв=Uзтв/Iв.н=10/7,1=1.4

Принимаем  с.
с.

5. Настраиваем контур ЭДС на технический оптимум. Для упрощения расчётов заменяем контур тока возбуждения звеном первого порядка:





6.Схема и результаты моделирования в среде MatLab
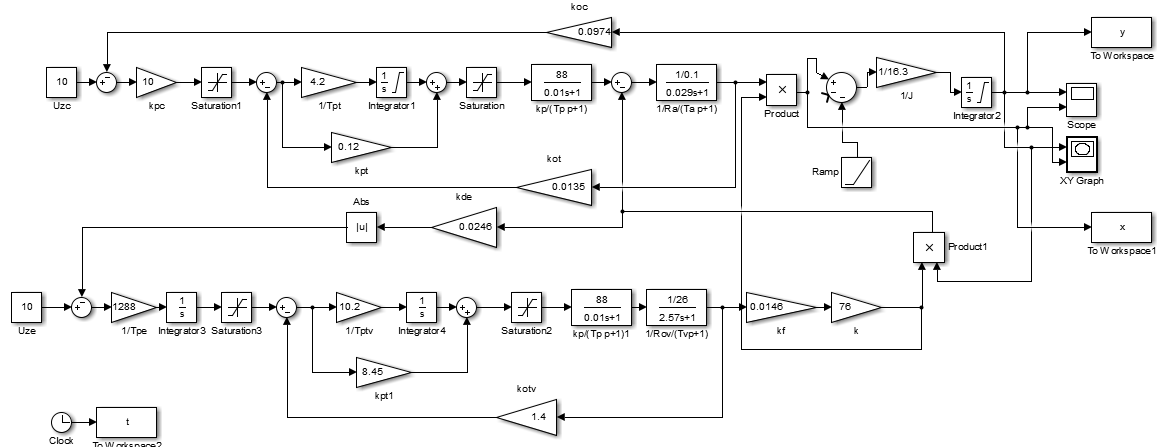
Рис.3. Модель электропривода с двухзонным регулирование скорости в MatLab
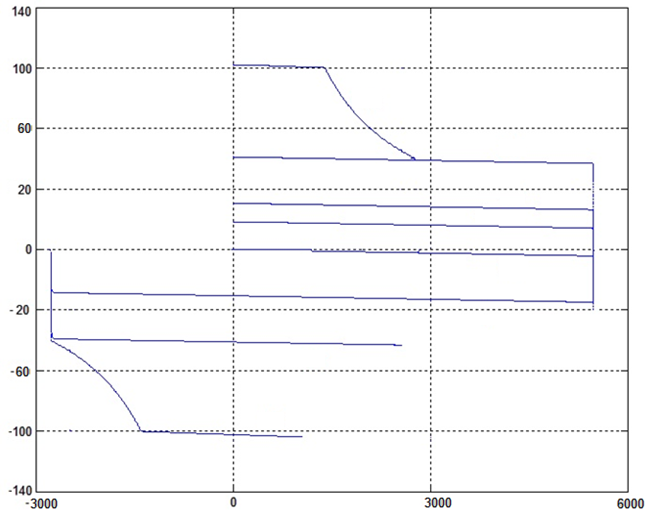 Рис.4. Статическая характерстика
Рис.4. Статическая характерстика
Полученные статические характеристики электропривода совпали с заданными, погрешность не превышает заданную.
Вывод: в ходе лабораторной работы мы научились рассчитывать и моделировать систему двухзонного регулирования скорости кранового электропривода.








